基于3D技术的轨道交通视频监视布点设计
2019-09-10李守杰赵敏
李守杰 赵敏
摘要:针对轨道交通车站公共区视频监视系统终端摄像机“无盲区”的覆盖需求,结合应用于轨道交通工程建设的BIM技术,提出将二者结合在轨道交通视频监视系统中应用3D技术科学化布点设计的技术方案。描述了3D技术科学化布点设计的理论和技术方法,针对3D技术科学化布点设计在车站公共区视频监视中应用的技术分析进行了详细阐述,并給出了相应的解决方案。通过实际应用分析,说明了3D技术科学化布点设计在轨道交通视频监视中的应用是可行的。
关键词:科学化;轨道交通;视频监视
中图分类号:TP391文献标志码:A文章编号:1008-1739(2019)08-62-3
0引言
建筑信息模型BIM逐渐应用于轨道交通工程建设中,在管线碰撞检测、精确组装等方面已得到广泛认可[1]。。随着反恐业务的需求及承载视频监视传输的IP网络技术的发展,摄像机在轨道交通车站公共区布点密度的要求越来越高,系统网络组织架构错综复杂,海量存储数据和大量设备对系统管理和运营维护等需求压力俱增。
针对轨道交通视频监视系统来说,现行地铁设计规范[2]中明确要求视频监视系统应在售检票大厅、乘客集散厅、上下行站台、自动扶梯和换乘通道等公共场所设置监视摄像设备。而随着城市轨道交通线网规模的不断扩大,客流数量急剧攀升,运营安全日益严峻,反恐压力与日俱增,在此基础上,提出视频监视在车站公共区范围内“无盲区”的要求。
在宁波轨道交通2号线监控布点时采用一种可量化地铁视频监控智能布点设计的基础上[3],结合BIM的应用,搭建适合于轨道交通的3D模型,将车站的公共区和无盲区方案在此模型中得到认证,并通过3D模型的建立来指导车站公共区前端摄像机的科学布点。
1 3D技术科学化布点
为了在车站公共区视频监视系统设计过程中,结合车站的具体形式以及各专业终端设备,统筹前端摄像机布点的整体规划,科学有效地评估前端摄像机布点位置的优劣,提出了3D技术科学化布点设计的方法[4]。
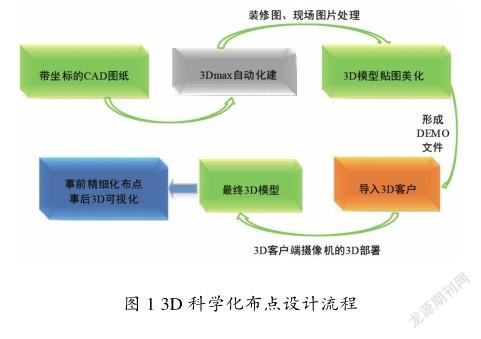
3D技术科学化布点设计方法通过对摄像机理论计算和现场模拟实验,定义出三维立体范围内清晰识别区、模糊识别区和盲区[5]。假定一个摄像机位置已确定,包括安装高度及三维坐标,再结合此监控摄像机镜头的焦距,绘制单点位的立体锥形可视域(反映在平面CAD图纸上为扇形区域)。将立体锥形可视域叠加至车站建筑的三维立体视角中,结合车站公共区“无盲区”的抽象要求进行三维视角比对,并根据比对结果进行调整摄像机前期规划,以科学合理的有效点位来满足车站公共区视频监视“无盲区”的监控要求,从而有效提高摄像机的利用率,实现降低系统成本、提高监控效率的目的,3D科学化布点的设计流程如图1所示。
2设计过程
3D技术科学化布点设计过程主要包括3D视场模拟、3D可视域设计和摄像机点位调整。
2.1 3D视场模拟
3D技术科学化布点设计的前提需模拟摄像机在车站公共区环境条件下的三维最佳视觉效果,模拟主要指标有3D视场角和3D可视视场长度。
(1)3D视场角
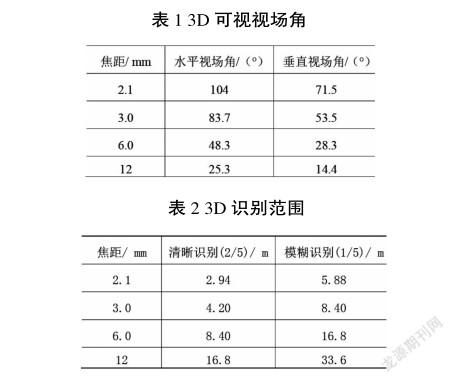
通常情况下,以摄像机的镜头为顶点,被测物体通过镜头左右边缘之间的夹角,称为水平视场角;被测物体通过镜头上下边缘之间的夹角,称为垂直视场角;通过水平视场角和垂直视场角的有效组合称为3D视场角。3D视场角的大小决定了摄像机镜头的视线范围,视场角越大,放大倍率越小,视线范围越大;反之视场角越小,放大倍率越大,视线画面中物体越大。一般情况下,视场角越大,焦距就越短。根据轨道交通视频监视系统行业内常规摄像机镜头焦距和视场角的对应关系,以镜头尺寸为1/2.8英寸、分辨率为1 080 P的摄像机计算视场角数据,3D可视视场角如表1所示。
(2)3D可视视场长度
轨道交通视频监视系统中图像质量可采用5级损伤制的标准进行评价,然而清晰区和模糊区的图像识别存在差异,需通过三维模拟实验来确定常规摄像机在车站布点中有效的视场长度,以镜头尺寸为1/2.8英寸、分辨率为1 080 P的摄像机,3D视场清晰。识别区和模拟识别区的分界面如表2所示。
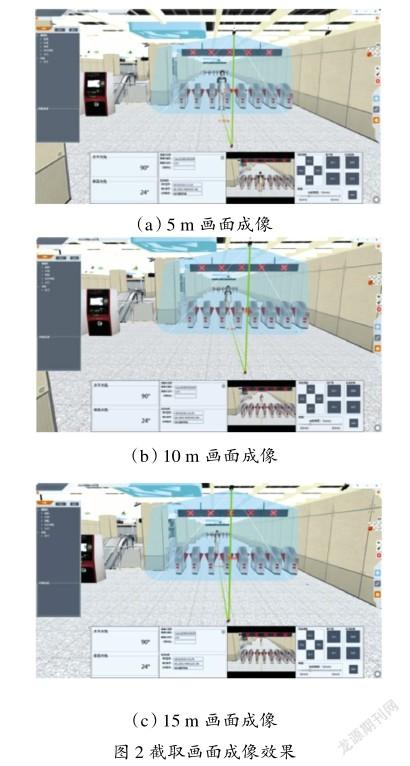
选择以人的面部占终端显示屏的显示比例为参考,以1 080 P(焦距为6 mm)摄像机为例,在5 m,10 m,15 m处终端显示屏上截取画面成像效果如图2所示。
2.2 3D可视域设计
根据摄像机3D视场角和3D可视视场长度的研究结论,结合轨道交通应用的BIM技术以及视频监视系统中常用的摄像机,可绘制车站公共区三维立体图以及各摄像机的3D可视范围。通过三维立体图可解决立体环境下前端摄像机的覆盖范围与其他各专业终端设备冲突点、视角最佳位置等,特别适用于具有人脸识别功能摄像机的定位,能有效地抓拍到清晰的视频和图片[6]。在3D科学化布点设计软件中模拟车站公共区立体画面和摄像机3D可视域设计,确保了3D可视域设计的可行性和真实性,为后续3D科学化布点设计的应用和推广提供了可靠依据。
2.3摄像机点位调整
在实际车站公共区摄像机布点设计过程中,除考虑3D视场模拟和3D可视域设计因素外,还需考量车站公共区内建筑布局、其他专业终端设备的遮挡及点位补盲等问题。所以,从3D技术科学布点设计到摄像机实际布点的应用仍需不断地总结和优化调整。调整的原则包括:①公共区摄像机的分类、布点,应关注客流量较集中的重点区域;②减少重复覆盖率,保障“无盲区”要求;③结合车站的建筑装修及各专业终端在三维空间的布置,合理地布设摄像机,减少冲突点。
3结果分析
以宁波轨道交通3号线一期标准车站公共区的摄像机覆盖为模拟环境,在3D技术科学化布点设计中,参照3D视场模拟和3D可视域设计,在BIM三维立体技术空间中构建前端摄像机的高度、视角及覆盖范围,设定前端摄像机的最佳可视范围,从而优化了车站公共区摄像机视角范围外的盲区。结合车站公共区特点及其他各专业的相互影响,在实际布点设计应用中不断地优化调整摄像机的点位,最终完成车站公共区摄像机的布点设计[7]。
经现场模拟对比分析,车站公共区前端摄像机的点位设计更具合理性,整体优化调整了摄像机的焦段和点位,增加了部分摄像机的布置,减少了盲区,与一种可量化地铁视频监控智能布点设计相比,3D技术科学化布点设计的应用,提高了摄像机的利用率。
4结束语
轨道交通视频监视系统智能分析业务正以多元化方向发展,如人脸识别、云平台多线路融合和大数据分析等,而智能分析业务是基于行之有效的车站公共区终端摄像机无盲区覆盖为基础,其数据來源通过采用3D技术科学化布点设计,从业主需求、设备基础及设计层面等多角度对前端摄像机的点位给出合理化的建议和优化方案,为轨道交通视频监视系统车站公共区无盲区的工程建设需求提供了一项全新的布点设计理念,同时也为3D技术科学化布点在轨道交通视频监视系统的应用打下了坚实基础。
参考文献
[1]蔡蔚.建筑信息模型(BIM)技术在城市轨道交通项目管理中的应用与探索[J].城市轨道交通研究,2014,17(5): 1-4.
[2]中华人民共和国住房和城乡建设部,中华人民共和国国家质量监督检验检疫总局.GB50157-2013,地铁设计规范[S].北京:中国建筑工业出版社,2013.
[3]李守杰,檀森林,吴林.一种可量化地铁视频监控智能布点设计[J].计算机与网络,2016,42(9):70-72.
[4]杜立婵.3D视频监控系统中的深度图生成方法研究[D].南宁:广西大学,2013.
[5]段华.视频监控系统摄像机镜头计算及选择[J].建筑电气, 2011,30(4): 53-57.
[6]曾建凡.多角度人脸检测与识别方案研究[J].电子设计工程, 2017,25(11): 41-44.
[7]李高丰.铁路旅客车站摄像机布置设计指南[J].科技创新与应用,2017(7):35-36.
