作物表型组学测量方法综述
2019-09-10仇瑞承魏爽张漫李寒孙红刘刚李民赞
仇瑞承 魏爽 张漫 李寒 孙红 刘刚 李民赞
摘要:随着世界人口的增长,粮食安全问题变得日益严峻,培育新的作物品种是解决粮食危机的一种有效途径。传统的作物表型测量人工成本高,工作效率低,不能为育种学家提供充足的数据,阻碍了育种的发展,因此改进表型测量方法是十分迫切的。育种学家多关注作物的形态学参数和生理学参数,多种传感器已经被应用于作物的参数测量。本文对一些表型参数测量方法进行了分析与比较,包括作物高度、叶片参数、株间距、叶绿素含量、水分胁迫指数、生物量等。同时,也对一些可用于多种参数测量的复合测量平台进行了总结。此外,本文指出了表型测量中的不足,应该改进当前的一些测量方法,以降低表型测量的成本,提高测量效率。
关键词:作物表型;高通量;传感器;形态学参数;生理学参数
1 前言
随着世界人口的快速增长、可耕地面积减少、全球气候急剧变化和水资源短缺,使得农业生产面临着严峻的挑战,粮食安全问题变得日益突出。
提高作物产量是解决粮食危机的最有效途径。作物受到自身基因和外部环境的双重作用,当前,作物更加频繁的遭受极端天气的影响(例如,大风、干旱和水涝),培育能够适应复杂多变环境的新作物品种是十分必要的。
过去几十年,作物育种领域取得了突出的成果,尤其是作物功能基因组学和基因技术的发展加深了人们对作物基因组的理解。当前,转基因技术受到广泛关注,被认为是粮食增产的最有效和方便的手段。随着作物基因技术的发展,育种学家尝试去探索作物基因和环境交互影响的本质。表型组学,是作物基因的外部表达,是作物基因和环境共同作用的结果。因此,理解基因型和表型的关系,并在细胞和组织的结构层面将它们与生理学相关联,就变得越来越重要。育种学家不仅关注最终的作物产量,而且关注作物的整个生长过程。一些作物的特性和表型参数,会随着作物器官的生长而变化,为了培育优良的作物品种,这些特性和参数需要在较长的时间内被连续测量。这项工作十分繁重,因为许多参数的测量是由人工完成的,其测量方法落后、成本高、耗时费力。低效的方法不能实现大规模的生产繁殖,不能充分地开发现有的基因数据。表型数据的缺失,使得表型组学已经超越基因组学,成为基因分析和育种研究的主要瓶颈和障碍。
近年来,电子、计算机科学和传感器技术的创新已经推动了表型组学的发展,一些新的针对表型参数的测量方法已经被提出。2010年后,快速、高通量的作物表型组学方法,可极大地提高作物的育种效率。多种现有的传感器和技术被应用和融合,一些成熟的精细农业技术也被应用于表型组学。此外,传感器技术、三维图像技术、逆向工程和虚拟植物技术为表型组学的发展提供了基础。这些测量方法可应用于田间或实验室,采集大量的数据,进而促进高通量表型组学的发展。
表型组学可以以一种快速、准确的方法实现作物形态学参数和生理学参数的测量,帮助育种学家分析和筛选具有耐盐性、耐旱性和抗病性的作物品种。本文依据高通量作物表型组学中的形态学参数和生理学参数,对当前的测量方法和应用的传感器进行分析和总结,并对其存在的问题进行讨论。
2主要的作物表型参数和测量方法
目前,作物表型组学的测量目标多为常见的粮食和经济作物,如小麦、玉米、高粱、大麦、西红柿、豆类和葡萄等,这些作物对农业生产具有重要的实用和经济价值。表型测量通常关注于一些具有代表性的参数,这些参数可以被划分为形态学参数和生理学参数。形态学参数包括作物高度、茎粗、叶面积或叶面积指数、叶角、茎秆长度、株间距等,生理学参数包括叶绿素、光合速率、水分胁迫、生物量、耐盐性和叶片含水量等,这些参数都可以影响或表征作物的生长。
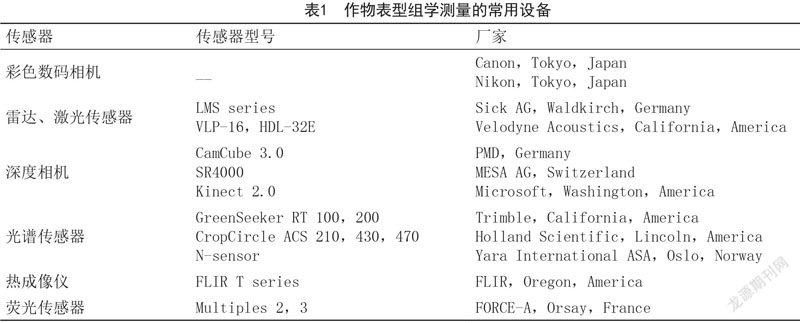
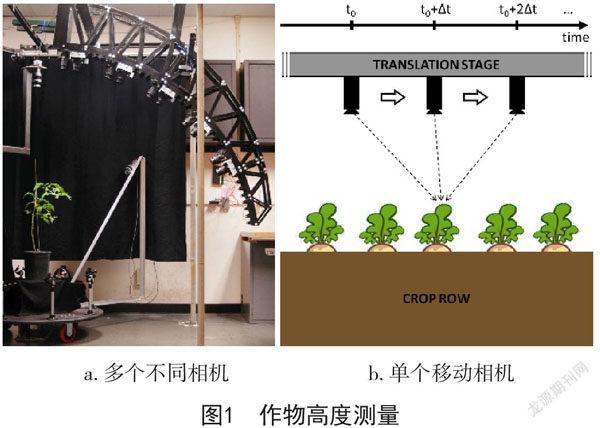
需要测量的表型参数有很多,所以各种传感器在表型组学中被应用。表型测量与很多传统技术相关,许多常用的和新颖的传感器被用于作物测量,包括彩色数码相机、雷达或激光传感器、深度相机、光谱传感器和光谱相机、热成像仪和荧光传感器等。后续章节将对几种被广泛应用于表型组学的常见传感器进行介绍,一些具有代表性的产品如表1所示。
彩色数码相机大部分由电荷耦合器件(CCD-Charge Coupled Device)传感器或金属氧化半导体构成,是机器视觉领域最常见、最简单的传感器。彩色数码相机可以采集物体可见光波段的信息,获得物体的彩色信息和纹理信息,与人眼的观测范围接近。作物的三维(3D-3 Dimension)結构可以通过立体视觉系统采集的多帧图像进行重建获得。立体视觉系统由一个或多个彩色数码相机组成,使得彩色数码相机可以测量更多的表型参数。
雷达传感器,自20世纪80年代后被广泛应用于农业研究,其发射红外或可见光波段的脉冲,大部分采用飞行时间(ToF-Time-of-Flight)、干涉法或三角测量原理。基于ToF原理的雷达传感器适合于长距离测量,其他雷达传感器则被用于短距离测量。雷达传感器输出包含目标与传感器距离信息的离散点云数据。雷达可根据结构划分为二维(2D-2 Dimension)和3D雷达。2D雷达通过扇形扫描来探测目标,并生成平面点云数据。3D雷达可以采集表征目标表面特性的高精度、高分辨率的点云数据,可更容易地获得目标的形态和结构数据。除了一些常见的用于距离测量的雷达传感器,作物表型组学中还应用了全波段雷达和高光谱雷达。全波段雷达不仅记录峰值强度,还以一种特殊波形保存激光脉冲返回的所有信息。全波段雷达(FWF-Full-Wave-Form)使得识别多种物体变得更加容易。高光谱雷达将作物的多波段光谱响应特性添加于点云数据,有利于诊断作物的活力。
深度相机能够同时提供实时的深度图像和信息。这种相机大部分采用ToF、结构光和光编码的原理,通常输出深度、幅度和强度图像。其中,深度图像包含有影像的Z坐标信息,幅度图像可以评估深度信息的质量,强度图像是一副简单的灰度图。RGB-D相机是一种较新的、低成本的深度相机,配备有RGB相机、深度传感器和红外发射器。RGB-D相机可以同时提供目标物的彩色和深度信息,Kinect和Xtion是两款比较常见的深度相机,被应用于作物测量等多个领域。
光谱传感器通常探测可见光波段(400~700nm)和近红外波段(700~1200nm)的反射信息,用于获得目标物的一些特性。GreenSeeker、ASDFieldSpec、N-sensor“ALS和Cropcircle等商品化的产品,已经被广泛应用。
光谱设备通常测量作物或土壤的多波段光谱反射信息,可提供一些经典的植被指数。此外,多光谱和高光谱相机可以以光谱图像的格式获得目标物在宽波段光谱的反射信息。与光谱传感器相比,光谱相机将每一个像素点与光谱信息相结合,有助于减少背景的干扰,使得光谱信息更加准确。
热成像仪探测和可视化目标物的红外辐射,该辐射与物体温度相一致。热成像仪的敏感波段为3~14μm,最常用的波段为3~5μm和7~14μm。热成像仪可以探测作物对胁迫状态的早期热反应,尤其是叶片部分。热成像技术可以直观的呈现出作物表层的温度。
荧光传感器采用一种独特的主动测量方式。作物的叶绿素是产生荧光的部分,外界光照被叶绿素吸收并用于光和作用,该过程中一部分吸收到的光转换成热能,另一部分以荧光的形式返回。作物的一些特性,尤其是与光合作用相关的参数,都可通过探测荧光获得。
其他的传感器,如超声波传感器和温度计,也可应用于表型测量,在下面的章节将进行介绍。
表型测量环境包括室内和室外,测量方式主要为手持式、车载式和无人机(UAV-Unmanned Aerial Vehicle)式。在后续章节中,将会根据传感器的类别对作物形态学参数(作物高度、叶面积(LA-Leaf Area)或叶面积指数(LAI-Leaf area index)、叶倾角(LIA-leaf Incline Angle)和株间距)和生理学参数(叶绿素、水分胁迫和生物量)的测量方法进行介绍和总结,如表2所示。一些常见传感器的特征如表3所示,传感器的详细信息将在后续章节进行说明讨
3 形态学表型参数测量
3.1 作物高度测量
作物高度是一个重要的形态学参数,可用于描述作物的结构。苗期的作物高度可表征作物的生长活力,其与作物的最终产量密切相关。
传统的作物高度测量由人工使用米尺完成,存在人为误差,尤其在作物高度高于人体时。彩色数码相机可用于测量作物高度,通过彩色图像处理方法获得作物高度,然而这种方法需要已知目标作为参考,难以实现快速、高通量的测量。一种准确的且被接受的方法是“差分法”,该方法通过计算冠层和地面的高度差获得作物高度。新的系统或传感器,例如立体视觉系统,雷达或激光传感器,超声波传感器和深度相机也被用于测量作物高度。
当前作物高度的高通量测量方法为车载式和UAV式,每种测量方法都具有它的优势和局限性。车载式测量由于近距离的采样可获得相对准确的原始数据,使得其可测量单株的作物高度。与之相反,UAV式测量距离冠层有一定距离,可获得相当多的作物高度信息。下面将对用于作物高度测量的多种传感器进行介绍。
3.1.1 基于立体视觉的作物高度测量
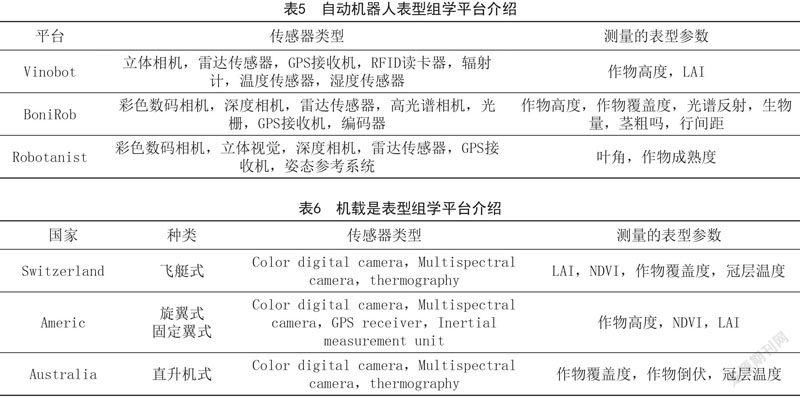
利用立体视觉系统,可以采集作物多个角度的图像,融合生成高精度的作物3D模型,用于测量作物高度。通常,用于融合的图像通过多个相机或一个移动的相机进行采集(图1),基于相机的相对位置生成3D模型。陈兵旗等采用双目立体视觉监测田间玉米,获得3D重建图像来计算作物的高度。为了实现单一相机测量作物高度,一些算法被广泛应用,SFM(Structure From Motion)和PMVS(Patch-based Multi-viewStereo)算法具有较好的处理效果。Jay等使用单个彩色相机应用SFM算法重建了作物的3D模型,利用彩色和3D信息推导出了作物高度。相机也可以安装在UAV上去采集大区域的玉米、高粱数据,然后应用SFM算法生成数字表层模型计算作物高度,但是结果不是很好,可能是由于图像数量的缺少造成的。高分辨率和高重叠率的图像非常重要。Santo和Rodrigues应用PMVS三维重建了玉米,并通过计算最高点和拟合的地面平面的距离估算了玉米株高,测量误差低于1%。立体视觉系统的处理精度和速度有待提高。双目立体视觉与测量距离正相关,SFM对误匹配非常敏感。同时,由于彩色数码相机的限制,立体视觉系统对自然光照的鲁棒性较低,限制了其室外应用。
3.1.2 基于雷达/激光传感器的作物高度测量
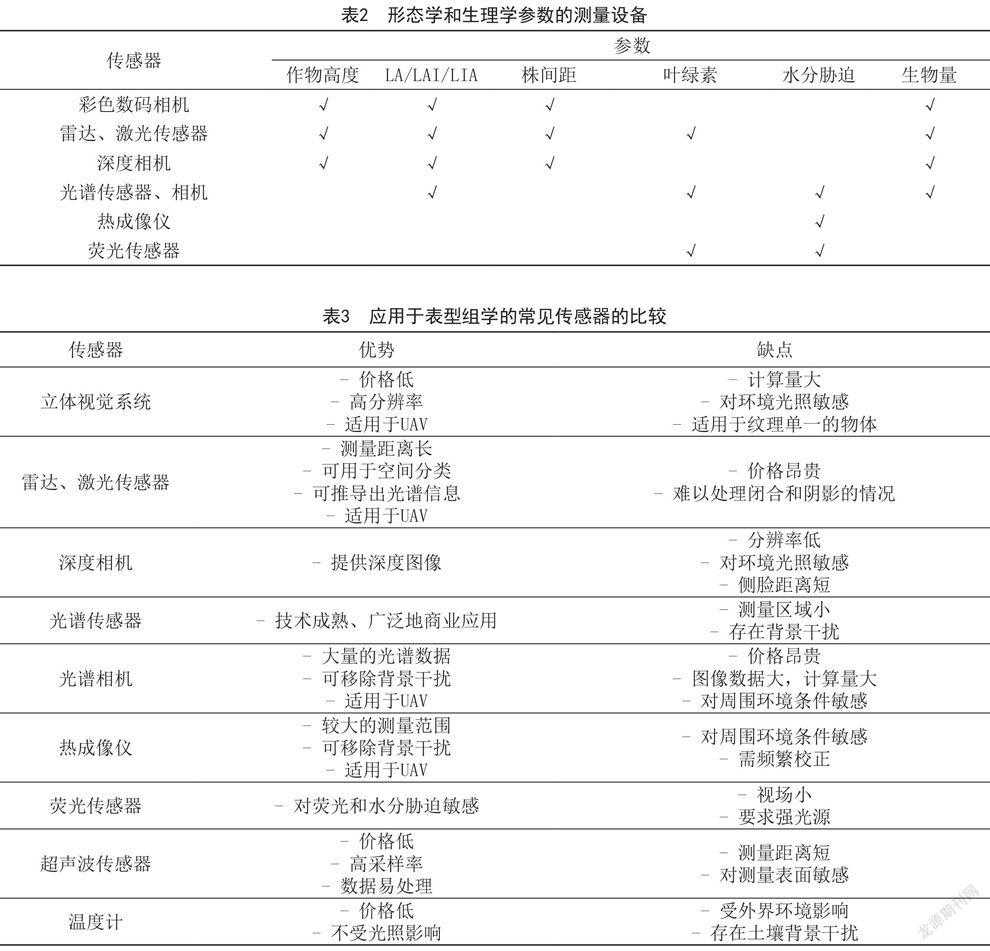
雷达和激光传感器对外界光照具有良好的适应性,且能提供大量的数据,因而被应用于测量作物的高度。一些研究选择车载式测量方式,安装雷达测量作物高度。作物高度可以通过雷达的点云数据推导得到,包括從作物冠层或侧面采集到的距离信息。Chatzinikos等使用激光扫描测量3种作物的特性,Saeys等使用2D雷达测量小麦,应用直方图的方法估算其密度。Zhang和Grift等使用2D雷达测量巨芒的茎秆高度。针对传感器安装或地面不平坦造成的倾角所引起的测量误差,Zhang和Grift分析后,根据纵坐标的最大值和最小值设计了一个校正算法。但是,行驶速度和外界风力都会影响上述研究,由于2D线性扫描的本质,较高的行驶速度会造成数据体积的减小。另一方面,2D雷达难以测量交叉闭塞的作物器官,如重叠的叶片和其分支。由于2D雷达的这些限制,一些研究中采用3D雷达安装于一定高度去测量作物。由于测量误差随测量距离的增长而变大,针对3D激光雷达的测量距离和安装角度需要进行考虑。针对这一问题,Ehlert和Heisig等进行了相关测试和分析。结果表明,基于点云数据生成的作物表层会随着扫描角度的增长而变得陡峭,如图2所示。当3D雷达对小的作物进行垂直扫描时,获得的点云数据精度最高,而测量高的作物时使用向前的视角较好。不同于2D雷达,3D雷达不受速度的影响,车速对测量结果的影响可以忽略不计。
新型雷达也被用于作物高度测量。一种4线的3D雷达被用于测量小麦和玉米的高度。这款雷达发射一个脉冲,位于不同高度的4个二极管接收返回信号,也就是一个脉冲可以获得四个返回信号,数据的精度和密度都得到了提升。Gao等采用UAV测量方式,应用一款机载FWF测量了玉米高度。与只接收有限最强波峰信号的雷达不同,一个FWF包含所有返回的雷达脉冲信号,不同的信号数据可以被融合分析。UAV的测量方式可以建立一个数字地形模型(DTM-Digital Terrain Model)以提高测量精度。作物高度可通过计算DTM与当前UAV表层模型的差值获得,并生成作物的表层模型。
3.1.3 基于超声波传感器的作物高度测量
超声波传感器的测量原理与雷达相似。尽管超声波传感器的空间分辨率低于雷达,但是其价格相对较低。超声波传感器由于其测量波段的原因,其不受自然环境的影响,所以被广泛应用于室外测量。作物高度可以通过超声波传感器应用差分法测量获得。Sui等使用超声波传感器,采用车载式的测量方法,并搭载GPS(Global Positioning System)系统测量了棉花的高度,生成了高度分布图。Sharma等将超声波传感器安装在一个二轮自行车上测量玉米的高度,用于产量估算。但是,超声波传感器的信号容易发散和衰减,其测量精度易受测量物体的方位和表面平滑度的影响,容易造成数据丢失。传感器通常垂直于地面安装,以保证测量精度,但作物上层叶片随风飘动会产生不同的读数。这些都使得超声波传感器不适用于长距离的测量。近年来,宽频域的声谱技术被应用于超声波传感器,使得超声波信号质量得到了显著提升,这或许会促进超声波传感器的应用。此外,超声波传感器可与雷达结合使用,以提高测量精度。
3.1.4 基于深度相机的作物高度测量
应用深度相机的深度信息可以测量作物的高度。一款田间机器人搭载PMD相机,通过计算距离直方图实现了作物高度的监测。但是,深度相机容易受到自然光照干扰,且其图像分辨率较低(例如,PMDCamCube相机的像素为204x204)。
除了深度信息,RGB-D相机提供的彩色信息可以帮助去除地面干扰,识别作物更加容易。Azzari等使用Kinect描述植被结构,作物高度的归一化均方根误差为2.7%~19.1%。Gai等使用Kinect识别作物并计算其高度,测量玉米高度误差小于2cm。Andujar等应用Kinect估算菜花的高度,与地面真实值的偏差小于2em。虽然价格低于上述传感器,但是Kinect可以提供高分辨率的图像(例如,640x480像素,最高可提供1920x1080像素)。此外,最新的Kinect对自然光照具有较好的鲁棒性,在作物表型组学方面具有良好的应用前景。
3.1.5 作物高度测量方法的比较与分析
与其他传感器相比,雷达由于可获得大量的数据,具有最高的测量精度。但是,雷达传感器的价格昂贵。尽管超声波传感器价格低廉,但是少有研究采用超声波传感器测量作物高度,主要是由于超声波传感器易产生大量的无效数据。此外,立体视觉系统需要图像的校正,深度相机的分辨率较低,数据经过处理后可能产生丢失。外界的光线对立体视觉系统和深度相机的测量精度都会产生影响。随着性能和算法的提高,加之低廉的价格和高精度的数据,Kineet是作物高度测量的一个不错选择。
车载式测量方法具有很多优点,上述传感器都可用于车载式测量。通常,GPS和编码器被用于实时记录车辆和作物的位置,因而自动导航系统可应用于车载式测量。地势的不平坦可能会影响到测量的精度。地面的和作物冠层的反射信息混合在一起,会对测量有一定的干扰,尤其在苗期。
UAV式测量方法由于其高效、低廉的特点获得很多关注。但是,当彩色相机应用于UAV测量时,UAV的速度和彩色相机的曝光时间会影响到测量精度。当前,由于雷达的高精度、高采样速率,已被大量应用于UAV测量。
3.2 叶角/叶面积/叶面积指数测量
叶片是作物的重要组成部分,对作物的生长至关重要,直接影响了作物对光能的使用率,因此,叶片参数是作物表型组学中的重要参数。许多形态学参数与叶片相关,这些参数在表型组学中被频繁测量,包括LIA或叶角分布(LAD-Leaf Dngle Distribution)、LA、LAI等。LIA指叶片表面所在平面与天顶角之间的角度,决定光的投射情况。LAD可反映作物的水分胁迫情况,也会影响到LAI的测量。LA指单个叶片面积,其对作物的生物统计观测很重要。LAI指单位面积内作物叶片面积的总和,LAI可以表征作物的群体活力和冠层结构,影响作物光合作用和水分利用。上述参数与作物的生物和物理过程相关,如光合作用、呼吸作用、蒸腾作用、水分利用和谷物产量。LIA可以人工使用量角器测量。与LIA相比,LAI和LA的测量是繁琐、复杂的。叶片需要刻画在一个含有单元格的纸上,通过计算单元格的数量来获得叶片面积。
为了节省时间,减少劳动力,许多传感器和技术被开发和应用于作物表型组学中的叶片测量,后续章节将对此进行介绍。
3.2.1 基于彩色数码相机和立体视觉系统的叶片参数测量
彩色数码相机是一款低成本的图像设备,被广泛应用于多个领域,包括测量作物叶片。通常应用形态学操作对采集的彩色图像进行处理,用于计算LIA、LA和LAI参数。邓立苗等通过图像处理方法测量玉米的叶片姿态。首先对图像进行校正和预处理,然后进行估算和提取,以获得茎秆和叶片的结构。最后,计算骨架分支的夹角得到LIA值。
根据像素点计算LA是一种常用的方法。An等利用一个彩色数码相机开发了一条流水线,可以测量叶片长度和玫瑰面积。颜色校正和光学扭曲校正后,利用颜色分量,将作物从背景中提取出来。然后,检索作物的边界,并计算其包含的像素点,从而获得玫瑰面积。
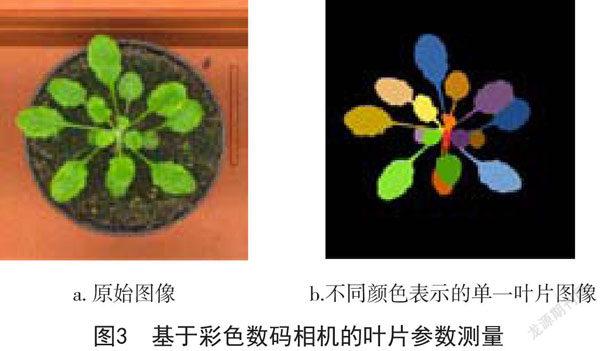
此外,彩色数码相机可被装在UAV上用于测量作物面积。Ribera等估算了高粱的特性,圖像被拼接和分割以确认作物的中心位置、评估叶片数量和LA。但是叶片直接的相互交叉使得不能测量单株作物。如何处理彩色图像中的单株作物或叶片的闭合和交叉是一个重要的问题。Scharr等、Pape和Klukas等进行了分割方法的研究。首先抽离出作物叶片,计算叶片图像中的欧氏距离生成骨架图像,然后检测叶片中心点、骨架末端点和骨架交叉点,最后应用分水岭转换分割出单独的叶片。重叠叶片被成功的分离,结果如图3所示。彩色图像可用于评估绿色覆盖度,之前的研究也表明叶片覆盖度与LAI存在一定关系。Liu和Pattey采用作物顶部冠层的彩色图像,通过计算覆盖度来估算LAI,测量结果与LAI2000线性相关。
立体视觉系统也被用于测量叶片特征。Yeh等开发了一款双目相机的立体视觉系统,对图像和相关的点进行了校正和匹配,分割出作物,并通过像素点个数计算LA值。Leemans等应用立体图片的距离信息建立模型,对田间LAI进行了分割和计算。多个相机可组成多角度的立体视觉系统,Zhang等利用不同角度采集的4张图片,应用SFM算法3D重建了辣椒,精确估算了叶片长度和宽度,这两个参数可用来测量LA。
3.2.2 基于深度相机的叶片参数测量
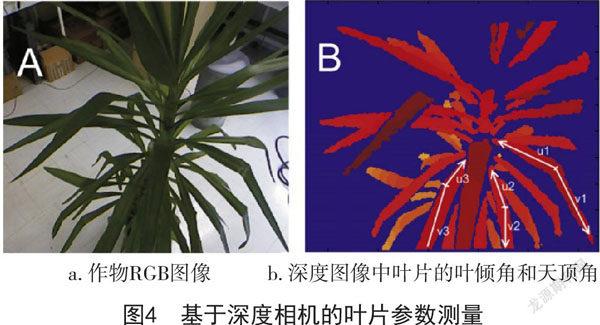
深度相机可用于分析测量叶片的参数。对PMD和SR4000深度相机采集的叶片室内和室外条件下的深度图像进行分析和比较,结果表明,针对各种条件,确定相机的最优积分时间是十分必要的。利用深度相机获得的深度信息被大量用于提取作物和叶片。Song等融合立体图像和ToF图像进行区域搜索寻找到了叶片的边界。Chene等提出了一种分割算法去处理Kinect采集的深度图像,用于提取叶片,并计算叶倾角和天顶角,结果如图4所示。此外,Andujar等应用高度和颜色的差异,将作物和地面分离,实现了作物叶片的提取和3D重建;然后对点云数据进行重构和平滑操作,提取获得LAD、LAI和LA。
3.2.3 基于光谱传感器和相机的叶片参数测量
通常,根据作物冠层的光谱响应情况可以推算植被指数。部分参数和LAI可通过无损的方法间接推算出来,其中,归一化植被指数(NDVI-Normalized Difference Vegetation Index)常被用于推导LAI。Hasegawa等将热点指数和NDVI结合起来用于推算LAI。他们提出了归一化热点植被指数(NHVI-Normalized Hot Vegetation Index)用于计算LAI,结果表明,NHVI可以更好地估算LAI。通常,可见光和近红外(NIR- Near Infrared)波段的光谱信息被用于建立LAI模型。Neinavaz等对热红外区域(TIR- thermalInfrared)的光谱信息进行了研究。分光仪被用于测量TIR的作物光谱信息。该区域的光谱信息大部分来自于作物自身的辐射,而不是反射。测量过程中进行了辐射校正,结果表明冠层的光谱反射率随着LAI的增长而变大。基于偏最小二乘法(PLSR- Partial LeastSquares Regression)和人工神经网络(ANN- Artificialneural Network)的分析结果表明,TIR的光谱数据可推算出LAI,但需要进一步的田间验证。LAI也可以通过光谱图像中作物的覆盖度进行推算,Dammer等使用多光谱相机收集作物在红色和红外波段的光谱反射信息,Schirrmann等采集作物的红色和NIR波段的光谱图像,以生成NDVI图像。NDVI图像用于提取和计算作物覆盖度,进而估算LAI。
3.2.4 基于雷达/激光传感器的叶片参数测量
越来越多的研究采用雷达测量叶片特征,通过扫描作物冠层和叶片,雷达可以快速获得叶片表面的点云数据,进而生成在室内或田间条件下的作物结构。
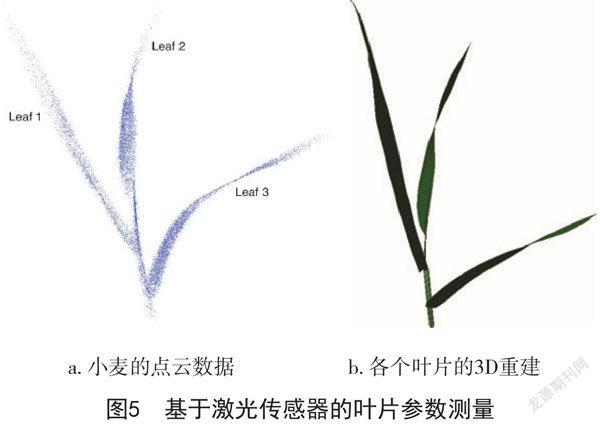
针对作物3D可视化和虚拟植物的研究已开展多年,3D点云数据和生长规则(例如,L系统)用于建模以提取和计算叶片参数,这些为后续的雷达测量提供了基础。在雷达测量中,LIA、LA和LAI可以通过计算表面获得。多视角或多帧的雷达数据需要被校准和匹配,来实现叶片的3D重建(图5)。Paulus等在室内条件下,应用手持式高精度雷达对大豆进行多角度的扫描和3D重建,并应用三角形对叶片进行重构,应用圆柱体对茎秆进行重构,实现了LA和叶角的测量。Hosoi等应用雷达扫描西红柿,提取了相关的点云数据,获得了西红柿的LA、LAI和LIA指数。Sirault等开发了一个表型测量系统,该系统包含雷达和其他传感器,用于测量室内的叶片。在田间测量方面,Gebbers等应用雷达传感器设计了车载平台,用于分析LAI和作物高度的关系;建立了一个回归模型,用于LAI的快速测量。
3.2.5 叶片参数测量方法的比较与分析
根据叶片的测量原理,上述方法可以分为两类。彩色数码相机、立体视觉、深度相机和雷达可以通过分割、重建叶片,计算得到叶片的真实值,从而实现叶片相关特征的测量和估算。光谱传感器和相机通过推导相关参数获得叶片特征。与推导方法相比,重建更加复杂,计算量很大。但是,重建方法的测量精度通常高于推导的方法。
实际中存在的一些问题使得LIA、LA和LAI的测量方法需要完善。一方面,仅仅依靠单一视角的数据完成叶片测量比较困难,多角度的测量可以减少测量误差。另-方面,同一株或相邻株作物的叶片存在阻挡或重叠的情况,目前的方法难以对所有叶片进行分类。所以,测量结果通常较正常值偏小。
3.3 株间距测量
相当多的研究表明,株间距会影响作物的结构和群体,并引起水分和光照的不均衡分布,影响最终的粮食产量。测量株间距使得育种学家可以探索基因型和表型的关系。传统的测量方法费时费力,自动的株间距测量十分必要。其中,作物的定位是株间距测量的关键。
通常,彩色数码相机获得作物图像,处理和融合多帧连续图像以获得作物的位置分布图。然而,单个的彩色数码相机很难分离出单株作物,为了解决这一问题,雷达、立体视觉系统、深度相机和其他传感器被广范应用。Shi等应用2D雷达从侧面动态测量玉米茎秆,通过編码器数据获得各个茎秆的位置。但是,地面的不平坦、风力和叶片都会导致测量过程中数据的丢失。为了获得更多的信息,采用3D传感器进行测量。与2D传感器相比,3D传感器可以提供更广泛的相对位置信息,并很少受到地形和障碍物的干扰。Jin和Tang应用双目立体视觉系统识别苗期的玉米。通过对深度图像进行处理和分析,根据最低点和坡度确定了作物中心点。另外,通过顶部图像来确定作物位置,测量精度通常要比侧面的小。Nakarmi和Tang设计了一个搭载基于ToF原理的3D传感器和编码器的平台,通过处理侧面深度图像获得茎秆位置,然后计算得到株间距。同时,对不同帧的图像进行了融合,生成了作物行的分布图,计算相邻茎秆的距离即可获得株间距。
4 生理学表型参数测量
4.1 叶绿素测量
叶绿素是作物叶片的主要组织成分,是作物进行光合作用重要组成部分。缺少叶绿素,作物叶片的氮素将不能合成。一些研究发现,由于色素决定了大部分的光谱特性位于400~700nm,所以叶片氮素和叶绿素有高度的相关性。这一波段的光谱反射信息主要取决于叶片的叶绿素含量,与叶片氮素含量呈负相关。作物的营养和生理状态可以通过叶绿素含量来估算,测量叶绿素对监测作物生长至关重要。
凯式测量法在所有的叶绿素测量方法中精度最高,应用最广泛。但其操作复杂,且需要长时间的化学分析操作。测量过程中,叶片被破坏,影响了作物的生长。因而,快速、无损、低成本的测量方式是必要的。光谱技术因其快速、无损的优势被应用于作物化学成分的分析,许多光谱传感器和相机已被用于测量作物叶绿素。此外,研究表明,根据叶片对光线的响应,荧光技术也可用于叶绿素的测量,还有特殊波段的雷达或激光传感器也可用于叶绿素测量。下面将对叶绿素测量的多种传感器进行介绍。
4.1.1 基于光谱传感器的叶绿素测量
光谱技术的发展使得越来越多的成熟产品推向市场。光谱传感器是使用最多的设备,应用可见光和近红外光来评估植被状态。许多研究采用一些被动式或主动式的光谱传感器测量叶绿素。通常,不同波段的光谱信息被用于计算一些植被指数以推导叶绿素,这些植被指数中应用最多的是NDVI。
被动式传感器采集作物对太阳辐射的反射光谱,所以这些传感器受到外界光照的限制,常在晴天条件下的正午使用。Bai等将NDVI传感器和手持式光谱仪安装在田间平台上测量叶绿素。传感器和光谱仪全部由一个测量太阳辐射的单元和一个测量反射光谱的单元组成。两个单元的测量值用于计算NDVI,进而用于估算作物叶绿素。作为被动式传感器的代表,可记录作物多个光谱反射值的Yara公司的N-sensor被广泛的应用于叶绿素测量。同时,一个指向天空的光谱仪用于修正光线强度的波动。Raper和Varco分析了多光谱反射值,提出了一个简化的冠层叶绿素含量指数,用于测量棉花的叶绿素,结果表明红色边缘区域的反射值与叶片的氮含量高度相关。ASD FieldSpec是一种手持式设备,测量范围为350~2500nm,可提供高光谱数据。He等使用ASD提供的高光谱反射数据,通过多角度植被指数估测了小麦的氮含量,并指出测量角度对测量结果有显著影响。Thorp等采用PLSR测量了叶片叶绿素,测量结果优于NDVI和生理学反射指数。Inoue等比较了不同种类作物和区域的冠层叶绿素,发现815nm和704nm处的光谱反射值的比值可测量冠层的叶绿素含量。
GreenSeeker,CropCircle和其他一些有主动式光谱传感器的设备被大量应用于农业,这些传感器能够适应外部复杂的环境。传感器通常发射红色和NIR波段等与叶绿素有关的波段的光,并记录几个波段的反射值,用于计算NDVI等植被指数,进而预测叶绿素含量。Barker等将GreenSeeker,CropCircle安装在田间表型平台上,用于测量作物叶绿素。GreenSeeker的NDVI值从早晨到正午的变化为0.046,CropCircle的变化为0.0013,表明二者都不受外界光照的影响。Kipp等使用包括GreenSeeker和CropCircle在内的多种主动式传感器测量了冬小麦早期的叶绿素,并应用RGB图像作为参考,提出了一种新的指数—早期作物活力指数(EPVI-Early Plant Vigor Index),使用单个
波段值(670nm、750nm和862nm)来评估早期作物的活力。Samborski等使用GreenSeeker Model 505(红色波段为656nm,NIR波段为774nm)和CropCircleACS-210(琥珀色波段为590nm,NIR波段为880nm)测量冬小麦在三个不同生长期的冠层NDVI值。研究指出在作物生长前期,红色NDVI和琥珀色NDVI值与基因型有关,在生长后期,基因型只会影响琥珀色NDVI的数值。Taskos等比较了CropCircle ACS-210和ACS-430(红色波段为630nm,红色边缘波段为730nm,NIR波段为780nm),计算了不同的NDVI值,结果表明ACS-430指数和红色边缘指数与葡萄的叶片叶绿素含量高度相关。可对波段进行选择的ACS-470,其测量的植被指数也与作物氮素高度相关,红色边缘指数测量结果优于NDVI和比值类植被指数。但是,作物高度、测量距离、温度和土壤或相邻作物行的反射会影响主动式传感器的测量结果,最优的测量距离应根据作物的结构和生长期进行调节,高于冠层40em的测量距离是比较合适的。此外,在作物生长后期,随着冠层在NIR区域反射的减少,反射指数对叶绿素或氮素的测量不再敏感。
在所有的主动式和被动式测量的光谱传感器中,GreenSeeker、CropCircle和N-sensor在作物叶绿素动态实时测量中应用最广,这些传感器都可以安装于平台.上,适合于高通量作物表型组学。Raper等对N-sensor、GreenSeekerModel505和CropCircleACS-210进行了测试,结果表明,在作物生长早期,NDVI值较低时,N-sensor和CropCircleACS-210的灵敏度没有GreenSeekerModel505的高,但是在作物生长后期,NDVI值高于0.6时,其性能要优于GreenSeekerModel505。
4.1.2 基于光谱相机的叶绿素测量
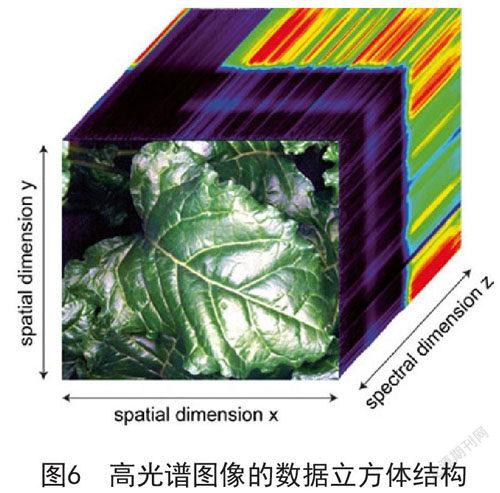
与常见的光谱传感器不同,多光谱或高光谱相机可以在较宽的波段范围内以高分辨率的图像来测量冠层的光谱反射(图6),可以应用图像处理技术将作物从背景中提取出来,并准确地推导出多种植被指数。基于这种优势,光谱相机广泛应用于作物叶绿素光谱相机大部分采集可见光和NIR波段的光谱信息,可用于车载式、UAV式和卫星式测量。但是,需进行辐射校正和几何校正,甚至大气校正。与光谱传感器类似,NDVI是测量叶绿素应用最多的植被指数。Bourgeon等使用车载式的可见光和NIR多光谱相机测量葡萄,提出了一种校正方法来采集光谱圖像。一个彩色板用于RCB和NIR图像的辐射参考,选用红色和NIR波段的光谱反射值来计算NDVI并生成NDVI图像。然后,对NDVI图像进行分割来识别叶片。叶片的NDVI平均值作为该区域的空间分布。近年来,越来越多的研究将多光谱和高光谱相机安装于UAV上来采集冠层反射,以测量作物叶绿素。首先,需要进行辐射校正对原始数据进行转换;然后进行大气校正来消除大气的吸收和散射的影响;最后,进行几何校正以消除机载测量值与地面光谱值的偏差。图像的空间分辨率可以达到分米,所有的图像被拼接到一起,从而获得该区域的测量值。Elarab等计算了一些植被指数,选取LAI、NDVI和红色波段用于估算燕麦的叶绿素,均方根误差为5.31μg/cm2。Kalacska等使用小波变换和神经网络模型预测叶绿素,决定系数为0.8~0.9。
卫星式的光谱相机可提供包含大区域的光谱图像,但是其空间分辨率低,且采样周期要长于车载式和UAV式的测量。Houborg等分析了来自Earth Observing-1卫星的地面分辨率为30m的高光谱图像。图像经过辐射和几何校正,然后进行大气校正。对植被指数应用多元回归来估测叶绿素。一些指数,尤其是位于红色边缘波段的,可以显著提高叶绿素测量的鲁棒性。
4.1.3 基于荧光传感器的叶绿素测量
作物吸收光线后,叶绿素会发射出叶绿素荧光(ChlF-Chlorophyll Fluorescence),主要来自于光合作用的第二部分,可用于测量作物叶绿素含量。ChIF信号可划分为红荧光(RF-Red Fluorescence)和远红荧光(FRF-Far-red Fluorescence)。RF和RFR的比值常用于测量作物叶绿素。
ChlF测量包括主动荧光测量和被动反射测量。主动荧光测量基于脉冲幅度调制或激光诱导荧光(LIF-Laser-Induced Fluorescence)模式,测量范围可达到几米。被动反射测量通过阳光诱导荧光(SIF-Sun-induced fluorescence)的方法推导出荧光。主动荧光测量与被动反射测量相比,对外界光线具有更好的鲁棒性,所以许多研究采用主动荧光测量。
LIF是一种主动测量的技术,叶片被激光传感器激发,然后发射出荧光,其大量应用于叶绿素测量。Yang等使用紫外(UV-Ultraviolet)激光诱导荧光,测:量荧光在685nm和740nm处的强度,采用BP神经网络和支持向量机(SVM-Support Vector Machine)模型来测量水稻的氮含量。他们发现应用荧光波峰处的强度测量氮含量比应用荧光的比值更灵敏、准确。Agati等、Longchamps和Khosla采用Multiplex荧光传感器测量氮含量,该传感器通过UV、红、绿、蓝光诱导RF和FRF,计算出黄酮醇指数,叶绿素指数和氮平衡指数(NBI-Nitrogen Balance Indices)。其中NBI与叶片氮含量高度相关,且不受季节影响。Longchamps和Khosla同时对Multiplex荧光传感器进行了一.些测试,验证了荧光传感器可测量作物早期的叶绿素。作物高度高于20em时,土壤对测量结果影响很小。为了研究光强和温度的影响,Thoren等在田间和室内条件下测试了LIF测量方法,结果表明作物叶片叶绿素含量与ChlF在690nm和730nm的峰值的比值高度相关,且随着光线强度的增加,该比值线性递减,最高至23摄氏度。
4.1.4 基于雷达或激光传感器的叶绿素测量
蓝光和红光是作物进行光合作用的重要来源,其会被叶绿素和类胡萝卜素吸收,而大部分绿色光会被反射。一些研究已经表明绿光的反射对作物叶绿素的变化很敏感,冠层在550nm处的反射会随着叶绿素的减少而增加。基于这一原理,Eitel等使用绿色(532nm)激光传感器开展了测量叶片叶绿素和氮素的研究,反射强度值被用于计算叶绿素。但测量结果会受到一些因素的影响。为了提高测量精度,该过程被分为以下几步。首先,使用白色参考板对激光参考强度进行归一化,修正激光强度的偏移量。然后,根据强度阈值移除土壤和边缘返回值。最后,保持激光传感器和作物间的距离恒定。结果表明,绿色激光的强度与叶绿素、氮素含量高度相关。此外,测试了多波段的激光系统,绿色和红色激光的返回强度可用于测量作物氮素。与之前的研究相比,该方法没有得到显著提高,可能与叶片角度的增大有关。
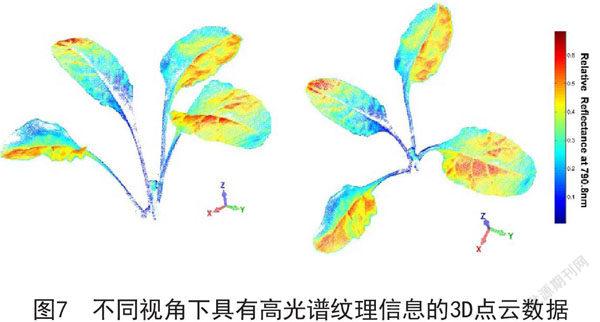
随着雷达技术的发展,高光谱雷达应用于作物叶绿素或氮素的测量。这种雷达的光谱范围较宽,能够生成具有光谱信息的点云数据(图7)。Sun等对ASD FieldSpec、多光谱雷达和高光谱雷达进行了比较,结果表明高光谱雷达在测量作物氮素方面具有最优的性能。Nevalainen等使用高光谱雷达测量叶片叶绿素,NDVI值较低的数据点被移除,然后对植被指数进行线性回归分析以估算叶绿素。结果表明,使用750nm和705nm反射值计算获得的修正的叶绿素吸收比值指数在测量针叶形叶片叶绿素方面具有最优性能。Du等采集了高光谱雷达的反射强度,提取特征波段应用SVM回归计算了氮含量。他们指出应用更多的波段回归分析可显著提高测量精度。此外,他们还将高光谱雷达数据与LIF数据结合来探测氮素,应用SVM回归,PLSR和2种ANN分析,测量结果的决定系数较高。他们同时发现当叶片氮素含量较高时,光谱反射测量作物叶绿素的效果并不太好。
最近,Ounis等介绍了-种新的雷达系统,可将LIF和SIF结合起来,或许有助于叶绿素的测量。
4.1.5叶绿素测量的比较与分析
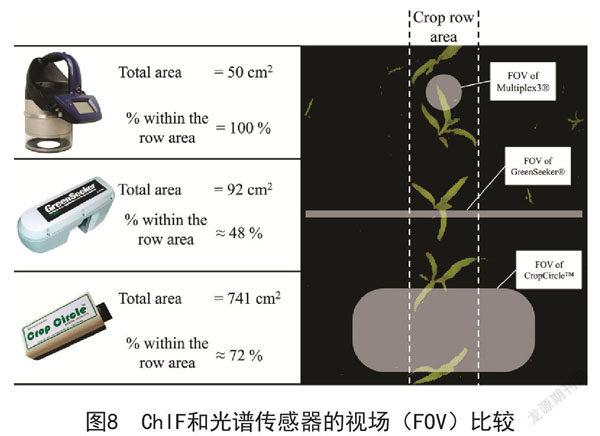
叶绿素测量是许多研究的重点,相关的光谱产品和传感器被广泛应用。光谱测量易受到外界条件的干扰,尤其是太阳光线,主动测量原理的传感器的测量精度比被动测量原理的传感器要高。之前的研究已经表明,土壤的光谱反射信息会对早期作物的叶绿素测量产生影响,主要是由于作物生长早期土壤覆盖率低。应用多光谱或高光谱传感器和相机丰富的光谱信息,通过推导多个植被指数有助于消除背景的干扰。多光谱或高光谱相机不仅适用于车载测量,也可安装在UAV或卫星上,使得其可通过融合、拼接多帧图像实现大面积的测量。图像处理方法也可用于提取植被,消除背景干擾。但是,由于光谱相机的高速率,其数据量十分庞大,尤其是UAV测量中,需要进行繁重的线下处理。ChlF测量方法比植被指数测量对叶绿素的变化更加敏感。与光谱传感器相比,如GreenSeeker或CropCircle,Multiplex荧光传感器的视场更小,如图8所示。由于反射信息基本来自于作物,使得ChlF测量不受距离和土壤的干扰。荧光在大约690nm和740nm处的信息被大量用于分析和估测作物叶绿素。
激光传感器的测量精度主要依靠反射强度,但是会受到诸如温度、叶片边缘、测量角度和叶片平整度的影响,测量方法需要完善。高光谱雷达为实现叶绿素的空间和时间的测量提供了帮助,拓宽了雷达的应用。
4.2水分胁迫测量
全球气候变暖和水资源的短缺不可避免的导致粮食产量的减少。关于作物水资源利用率的研究变得日益重要,水分胁迫是评估作物耐旱情况的一个重要指标。气孔导度和叶片水势(LWP-LeafWaterPotential)又是作物水分胁迫的至关重要的指标。冠层温度可反映气孔导度,作物水分胁迫指数(CWSI-CropWaterStressIndex)与LWP相关。通常,水分胁迫可通过两种方法测量,一种是基于冠层或植被温度,另一种是基于冠层或植被的反射情况。热红外技术是评估冠层温度的一种有效手段,光谱技术被广泛的用于冠层反射测量。一般来说,温度仪、热成像仪、光谱传感器和相机被用于测量水分胁迫,下面将对相关的方法进行介绍。
4.2.1基于温度仪的水分胁迫测量
温度仪可安装于一些表型组学平台上用于监测作物冠层温度,其测量范围比较集中,有利于减少干扰。尽管采用长红外波段测量的温度仪不受外界光照影响,但是其测量值还是与外界环境温度有关。Barker等的测试表明,当外界温度较高时,温度仪的读数高于表层温度,外界温度较低时,温度仪的读数低于实际温度。因而,根据地面热电偶的测量值,他们提出了一种校正方法来减少测量误差。
冠层温度通常低于外界温度,但是当植被覆盖度较低时,尤其在作物早期,中午时分的土壤温度会高于外界温度,干扰到测量。为了减少土壤的干扰,Rischbeck等采用两个温度仪,以45度的角度采用相反的方向测量冠层温度,这一视场可以增大作物的测量比例。然后采用测量的最低温和最高温用于计算CWSI。此外,一些研究采集外界环境温度来校正温度仪数据,Ni等、Kim等和Bai等将冠层温度和大气温度的差值作物水分胁迫的一个指标来评估作物的生长。
4.2.2基于热成像仪的水分胁迫测量
红外热像仪被认为是一个测量作物温度的高通量工具,能够使我们评估作物水分在时间和空间上的变异。
热成像仪采集的图像通常包含冠层温度和背景温度,如何消除图像中的背景噪声是一个重要问题。一般的,一种经验方法是基于冠层和背景的温度差异来分离冠层。由于环境的变化,图像的采集时间很重要。早晨时,土壤和冠层的温度差异较小,LWP不稳定,太阳角度不理想。相反地,正午时分太阳光下的叶片气孔会关闭,LWP稳定,温度图像中的温度差异最高,可用于评估冠层的水分胁迫。另一种分离冠层的方法是同时采集冠层的温度和彩色图像。温度和彩色图像首先进行配准,然后根据彩色图像处理的分割算法对冠层进行提取。该方法可以识别叶片和阴影下的土壤,提高温度的测量效率。此外,温度图像的分辨率在消除不正确的温度点时很重要,尤其是那些同时包含冠层和背景温度的边缘像素点。
红外热像仪适合用于车载、UAV和温室测量,可同时采集作物温度图像和环境参数,但温度图像需要进行辐射校正。计算获得冠层温度后,CWSI、LWP、水汽压亏损(VPD-Vapour Pressure Deficit)和其他参数可用于评估作物的水分胁迫。
4.2.3 基于光谱传感器和相机的水分胁迫测量
Buitrago等开展了相关工作,以研究由水分或温度胁迫引起的作物在热红外波段的光谱变化情况。研究发现,水分胁迫和温度胁迫会产生类似的光谱响应,中红外波段的发射率会随着水分的丟失而减少。因而,一些光谱传感器被用于测量作物的冠层温度或水分胁迫。EIsayed等对高光谱主动测量传感器、高光谱被动测量传感器、主动光电传感器、CropCircle和GreenSeeker进行了测试以评估冠层的归一化相对温度(NRCT-Normalized Relative Canopy Temperature)该指数与CWSI相似。结果表明,所有传感器获得的光谱指数与NRCT高度相关。
对光谱传感器和相机来说,应用光谱指数评估作物的水分胁迫是-一个主要的方法,但是叶片内部的构造会影响这些指数的灵敏度。Bandyopadhyay等采用光谱仪收集了小麦在特殊波段的光谱反射,计算了不同的水分胁迫指数来评估其水分胁迫情况。Winterhalter等使用--系列的光谱指数评估了玉米的冠层水分,几个光谱指数的决定系数大于0.70。此外,高光谱相机也可用于测量水分胁迫。Moshou等提取了高光谱图像中的光谱特征,用于探测小麦的水分胁迫。他们采用最小二乘的SVM分析了光谱数据,提取获得了六个指数,其中心波段分别位于503nm、545nm、566nm、608nm、860nm和88lnm。Rossini等分析了机载相机获得的高光谱数据,证明光化学反射指数可用于测量作物的水分胁迫。
4.2.4 水分胁迫测量的比较与分析
温度仪的测量范围较小,其测量精度与植被覆盖度相关。热成像仪可提供一个区域的温度,可直接检测全局的变化,尤其在UAV测量中。但是,通常温度图像中的感兴趣区域由人工设定,测量角度也会对冠层温度的测量有影响,且温度图像的分辨率有待提高。尽管一些光谱指数与作物水分含量和气孔导度高度相关,但冠层温度和其相关指数仍然是用于评估水分胁迫的最佳指标。
水分胁迫的测量仍然存在一些问题需要解决。首先,温度测量容易受到外界环境因素变化的影响,如太阳辐射、云层覆盖、风速、大气温度、湿度和VPD等,且测量的时间也会影响测量结果。其次,冠层温度会随冠层结构、作物高度、土壤覆盖度、叶倾角和其他因素而变化,为了提高水分胁迫的测量精度有必要将不同的传感器和测量参数结合起来分析。荧光技术也被证明可用于水分胁迫测量,其对水分胁迫的测量更加灵敏。
4.3 生物量测量
作物的生物量指作物的总体鲜重和干重,包括地表生物量和地下生物量。作物生物量在许多方面是一个重要的生态学指标,例如作物的结构、光吸收和碳同化情况。地下生物量的测量较困难,所以大部分研究集中于测量作物的地表生物量。一方面,地表生物量可表征作物的营养状态和氮使用情况。另一方面,育种学家将地表生物量作为估算作物根部长势的参考。通常,地表生物量的测量可采用破坏式、非光谱式和光谱式方法。破坏式测量需要将作物收获、分拣、烘干和称重,这一过程费时费力。非光谱式测量大多测量作物的一些参数,然后建立预测模型来估算地表生物量。常测量的参数包括作物高度、叶绿素、LAI和一些植被指数。这些参数可通过前几个章节的测量方法获得。下面章节将对生物量的测量方法进行详细介绍。
4.3.1 非光谱式的生物量测量
非光谱式测量主要集中于作物高度的测量。
类似于树木的主干,作物的茎秆占据全部作物重量的大部分。作物的高度主要由茎秆决定,一些研究中的地表生物量预测模型将作物高度作为一个重要参数。雷达被用于测量大米、油菜、冬黑麦、冬小麦和牧草的高度,然后进行线性回归,结果表明地表生物量和作物高度有很强的相关性,相关系数为0.60~0.99。Fricke等将超声波传感器安装在车上测量牧草的高度,测量结果用于估算生物量,平均残差为0.893~1.672。当牧草没有出现重叠时,测量精度很高。应用作物高度估算生物量的效果很好,但是也有待提高,植被覆盖度的影响应该被考虑,尤其是在作物的早期生长阶段。Li等使用机载雷达反演了中国西北和北部的玉米的LAI和株高,用于估算生物量,测量精度和效率得到显著提升。
4.3.2 光谱式的生物量测量
光谱式的测量主要应用光谱传感器和相机测量一些作物的植被指数和氮含量。作物的氮含量是作物生物量的重要成分。生物量的积累与氮素的使用率密切相关。NIR波段可用于测量氮素,进而估算生物量。SPAD和ASDFieldSpec被广泛使用,建立了一些基于作物冠层的高光谱反射模型。Gnyp等应用NIR和短红外波段的多个波段,提出了一种植被指数,用于建立生物量模型,提高了测量精度。此外,Mistele和Schmidhalter使用光谱传感器开展了一系列车载测量研究。Erdle等将一种采用双向被动测量的辐射计与三种采用主动测量的传感器(CropCircle,GreenSeeker和一种主动传感器)进行比较,并计算了几个植被指数。结果表明,采用主动测量的传感器适用性更好。与氮素相关的参数,如NDVI、R780/R740,与作物生物量密切相关。相当多的研究表明冠层结构影响生物量的估算,LAI和生物量的相关系数达到0.96,且玉米生物量的垂直分布呈“钟”形。因而,有必要结合冠层参数去估算作物生物量。
4.3.3 联合式的生物量测量
许多研究正尝试将非光谱方法和光谱方法结合起来估算地表生物量。作物高度和几个与氮含量相关的指数用于建模,提高了地表生物量的估算能力。在玉米生长的早期,Montes等使用光栅和光谱传感器,采用SVM回归估算生物量,结果呈现高度重复性。Freeman等使用GreenSeeker测量NDVI,并结合作物高度预测了拔节期玉米的生物量。使用ASD FieldSpec可进行高光谱测量,然后计算植被指数,如NDVI、归一化反射指数。这些指数可以与雷达或超声波测得的作物高度融合,用于估算生物量。
4.3.4 生物量测量的比较与分析
研究表明作物高度是估算生物量的一个重要参数,也是非光谱式方法的测量重点。水分和氮素含量也影响到作物生物量的估算,这两个参数可通过光谱式方法进行测量,但结果易受到天气、植被覆盖度和土壤的干扰。作物高度连同氮素和水分含量被视为估算作物生物量的基础参数,这些参数可以被结合起来用于估算作物的鲜重和干重,从而提高作物生物量测量的准确度和鲁棒性。
5 复合式表型组学平台
尽管有许多学者开展了表型组学参数的研究,但是大部分的研究集中于一个或有限参数的测量。为了实现高通量作物表型组学,应该开发复合式表型组学平台用于测量多个表型特性。一些研究机构已经开发了一些整合多个传感器的表型组学平台,这些平台按照测量方式,可以划分为两类,一类是车载式表型组学平台,另一类是机载式表型组学平台。
5.1 车载式表型组学平台
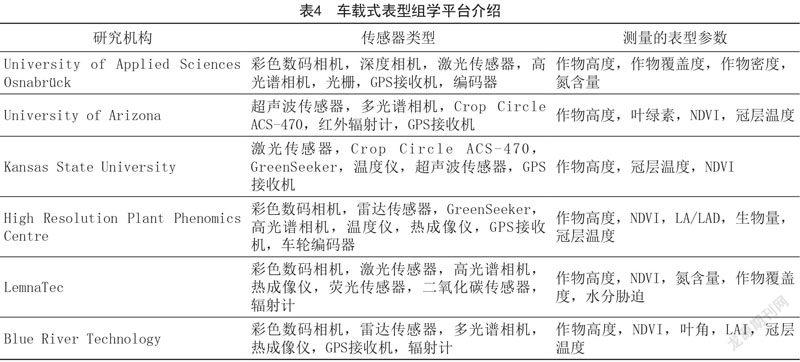
通常,车载式表型组学平台由牵引车或人工驱动。根据作物的种类和生长时期,传感器被安装在平台的不同位置和高度。相关的配件包括动力系统,数据采集终端,GPS接收机,编码器等,以保证车载系统的工作。一些代表性的表型组学平台如表4所示,包括Busemeyer等設计的“BreedVision”、Deery等设计的“Phenomobile”和两款基于牵引车的平台。表型测量研究在商业领域也拥有巨大的市场和发展潜力,一些公司也推出了相关的商业产品。如表4所示,Blue River科技公司设计了一款车载式测量平台,装载了多个传感器,可实现多个角度的观测。LemnaTac针对田间表型测量,设计了Scanalyzer Discovery平台。
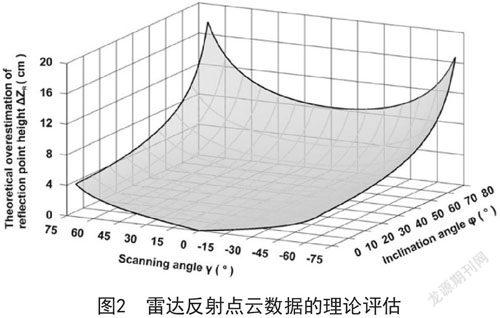
除去上述平台,车载式表型组学平台还包括自动机器人平台。机器人平台可减少人力劳动,提高工作效率。机器人平台主要适用于测量玉米和高粱。雷达和彩色数码相机被用于测量表型组学参数,同时探测作物的茎秆,根据茎秆位置生成导航线,如表5所示。代表性的自动机器人平台包括“Vinobot”、“BoniRob”和“Robotanist”。机器人平台的优势在于它们可以随时采集作物信息,且通常机器人平台的体积都比较小。
5.2 机载式表型组学平台
几年前,机载式表型组学平台第一次应用于作物表型测量。值得注意的是,机载平台的测量面积和测量效率远远高于车载平台,机载式平台也适用于大部分作物。常见的一些机载式平台是飞艇式、旋翼式、固定翼式和直升机式。飞艇式的平台不方便移动,容易受到风的阻挡。旋翼式机载平台较灵活,可以以较低的速度工作在任何高度。固定翼式平台可以飞行较长时间,但是其飞行速度和高度都较高,容易造成图像丢失。直升机式平台结构复杂,且维护成本较高。所有的机载平台中,旋翼式平台和固定翼式平台应用最广泛。由于载重的限制,安装于机载表型组学平台的传感器要少于车载式平台,几款代表性的表型组学平台如表6所示。
5.3 表型组学平台的比较与分析
车载式表型组学平台可以近距离的观测作物表型,一款可接收各种传感器数据的高性能终端十分重要。雷达、GPS、陀螺仪和其他传感器可实现自动导航,并生成作物的表型特征分布图。但是,车载式表型组学平台容易对作物造成损伤,尤其在作物成熟期。每一款车载平台都受到行间距、株间距和作物高度的限制。因此,这些平台难以测量不同的作物或不同的生长期。尽管机载式平台的图像分辨率、安全性能和载重量有待提高,但其在作物表型组学中有巨大的应用潜能。
6 结论
表型的测量研究可以提高基因研究的效率,促进其发展。本文总结了几种表型组学研究中的形态学参数和生理学参数的测量方法,介绍了相关的传感器,并对其存在的问题进行了讨论。
表型组学和测量方法发展迅速,但是针对田间数据的大规模自动采集需要得到提高。因此,快速、高通量的测量方法是必要的。当前的许多研究将相关的传感器进行融合,并实现数据的自动采集。上述的许多传感器可以同时测量多个参数,所以对传感器的安装位置和角度进行优化,以充分开发其性能是十分重要的。将一个或多个传感器提供的多种数据(例如彩色数据、深度数据、光谱数据等)进行融合,有助于数据的处理和表型参数的提取。另一方面,当前一些研究面临多种问题,严重地影响了表型参数的测量精度,提高复杂田间环境下传感器的适用性和鲁棒性尤其重要。如前文所述,传感器可以提供大量的作物信息,但是存在数据量庞大,计算耗时的问题。应对当前的算法进行优化和创新,以提高数据的管理和计算效率。
监测作物的生长环境也是必要的。土壤养分、外界环境温度和湿度、光线辐射度等参数应被记录并建立相关的数据库,用于分析作物表型组学和基因组学间的关系。此外,根部作为作物生长至关重要的一部分,快速、无损的根部测量方法应该在未来得到开发。
