自由设站法在水工建筑物变形监测中的应用与分析
2019-09-10刘大伟吴敬文盛青
刘大伟 吴敬文 盛青

摘要:对于水工建筑物的变形观测,由于其特殊的空间分布和通视条件,常规的监测方法往往不能满足观测精度需要。采用自由设站加极坐标的方法,利用TS50全站仪进行码头水平位移的观测,并对自由设站点点位精度和监测点点位精度进行了探讨。结果表明,该方法精度可满足码头平面变形观测精度需要,便于实施,解决了三面环水的水工建筑物在控制点位于监测点一侧、监测点位通视不良的情况下平面变形难以施测的问题。
关键词:变形监测;水工建筑物;自由设站法;极坐标法;TS50全站仪
中图法分类号:TV698.1
文献标志码:A
DOI: 10.15974/j.cnki.slsdkb.2019.10.008
1 研究背景
随着长三角经济带的发展,沿江港区的建设对提高航运和物流的效率,以及发挥长江作为“黄金水道”在长三角经济发展的助推作用更加凸显。然而,随着河势演变,部分深泓逼近沿江码头,对码头的运行造成一定安全隐患,因此开展码头的变形观测对于码头安全运营尤为重要。
在水工建筑物如大型沿江码头的平面位移变形监测中,由于码头面上吊机和构筑物的影响,GNSS信号往往被遮挡,一般在码头后方堤防上或陆域设置基准点。采用全站仪边角交会的方式施测变形点,而基准网点则采用GNSS静态观测方式进行测量[1-2],但一些大型码头输煤皮带、廊桥、办公楼等构筑物众多,且作业繁忙,大型车辆、吊车等过往频繁,利用陆域的基准点作为观测站,视线遮挡严重,给边角测量作业带来较大的通视困难。因此,利用在码头上设置自由设站点,通过后方交会的方法获取自由设站点的坐标,再采用极坐标法进行边角交会的变形网观测工作,将大大改善对观测条件的适应性,提高工作效率[3-5]。
然而,位移观测点含有两次误差,即自由设站点的测量误差和极坐标法测量误差。对码头等临水的水工建筑物,其显著特点是只有一面是面向陆域,可以设置后视基准点,另三面环水,对后视点的布设和测设图形极为不利,而自由设站点的点位精度与后视点的夹角关系较大[6]。因此,针对典型码头的特点,进行自由设站点的精度估算,通过其规律指导现场自由设站点的选取,同时考虑误差传递,进而对平面变形观测点位的精度进行探讨,以期对码头平面位移观测进行精度评估。
2 全站仪自由设站法
2.1 自由设站法观测原理
全站仪自由设站法观测,是以同时测量角度和距离的极坐标法为基础,将高精度全站仪架设在码头上某一方便观测的位置进行设站,任意设置测站点的坐标及任一个方向的方位角进行定向。建立一个自由坐标系,从测站上观测多个已知控制点和水平位移变形监测点的方向和距离。在全站仪联测已知控制点时,各测点就有了两套坐标数据,即自由坐标系和统一坐标系。通过仪器内置的自由设站观测程序,就可利用这些控制点,将所有点(包括测站点)的自由坐标转换为统一坐标,通过对各变形点的周期性观测,便可得到各个变形点的位移变化。
2.2 自由设站点的坐标求解及精度计算
将全站仪设置于待定的P点,观测多个已知点进行测边、测角,求出P点坐标[7-8]。
2.2.1 两个已知点求解及精度估算
如图1所示,A、B为两个已知点,P为待定点。在P点设置全站仪,分别测定距离S1和S2,并测定夹角γ。因存在多余观测,可进行间接平差:
V=KX-L
(1)式中,V为观测值的改正数;K为系统矩阵;L为误差方程常数项。
随着γ角的增大,交会P点的精度逐渐提高,但γ角大于400时,精度提高得比较缓慢,故在实际中应避免使用小角交会。当γ角度一定时,交会P点的精度随着β1的增大而降低。
2.2.2 3个已知点求解及精度估算
3个已知点自由设站交会如图2所示。即仅在待定点P上设置全站仪,向3个已知点A、B、C进行观测,测得水平角α、β。利用已知点A、B、C的坐标和α、β计算待定点P坐标的计算公式为
在利用式(5)进行交会计算时,考虑到在α角较小时,α角的误差对未知点坐标值影响很小,因此总是选择3个已知点中同未知点连线的坐标方位角最小的已知点编号为B点,即αPB小于αPA、αPC。再按A、B、C逆时针方向对另外两个已知点进行A、C编号。
按式(5)进行交会计算时,待定点P点的点位精
由式(7)可推出下列结论:除起算数据误差、测角中误差影响待定点点位精度外,观测角α、β的大小,对待定点点位精度也会产生影响。α、β都等于120度时,待定点点位中误差最小。若P点位于已知点A、B、C的外接圆的圆周上,γ+δ= 180度,此圆为危险圆,P点有不定解。在选点时,应选在△ABC之内或者选在△ABC两边延长线的夹角之间。
3 自由设站法的应用与精度分析
3.1 工程概况
沿江某外线码头长约570 m、宽约49 m。引桥及码头上均布置有吊机、运煤传输带、输煤机等,各种支撑桩及构件密布,另外外线码头内侧还有小型转运码头,各码头作业繁忙,与江堤间的通视条件较差,给变形观测工作带来较大困难。
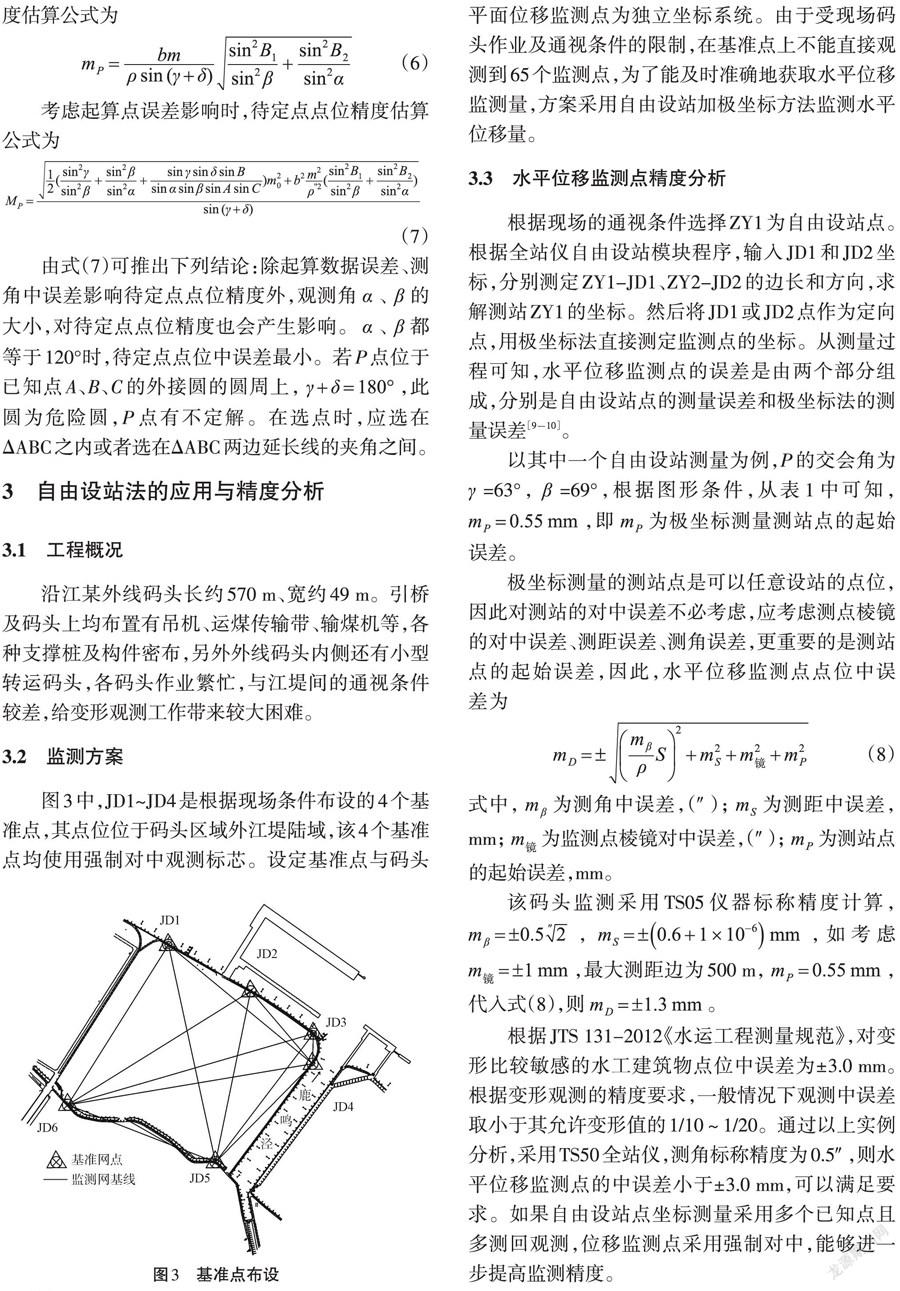
3.2 监测方案
图3中,JDl-JD4是根据现场条件布设的4个基准点,其点位位于码头区域外江堤陆域,该4个基准点均使用强制对中观测标芯。设定基准点与码头平面位移监测点为独立坐标系统。由于受现场码头作业及通视条件的限制,在基准点上不能直接观测到65个监测点,为了能及时准确地获取水平位移监测量,方案采用自由设站加极坐标方法监测水平位移量。
3.3 水平位移監测点精度分析
根据现场的通视条件选择ZY1为自由设站点。根据全站仪自由设站模块程序,输入JD1和JD2坐标,分别测定ZYI-JD1、ZY2-JD2的边长和方向,求解测站ZY1的坐标。然后将JD1或JD2点作为定向点,用极坐标法直接测定监测点的坐标。从测量过程可知,水平位移监测点的误差是由两个部分组成,分别是自由设站点的测量误差和极坐标法的测量误差[9-10]。
以其中一个自由设站测量为例,P的交会角为γ=63度,β=69度,根据图形条件,从表1中可知,mp= 0.55 mm,即mP为极坐标测量测站点的起始误差。
极坐标测量的测站点是可以任意设站的点位,因此对测站的对中误差不必考虑,应考虑测点棱镜的对中误差、测距误差、测角误差,更重要的是测站点的起始误差,因此,水平位移监测点点位中误差为
根据JTS 131-2012《水运工程测量规范》,对变形比较敏感的水工建筑物点位中误差为+3.0 mm。根据变形观测的精度要求,一般情况下观测中误差取小于其允许变形值的1/10 - 1/20。通过以上实例分析,采用TS50全站仪,测角标称精度为0.5”,则水平位移监测点的中误差小于+3.0 mm,可以满足要求。如果自由设站点坐标测量采用多个已知点且多测回观测,位移监测点采用强制对中,能够进一步提高监测精度。
4 结论
(1)自由设站法能有效解决临水水工建筑物复杂作业区的通视问题,对提高作业效率起到较好作用。
(2)自由设站点的点位精度与测设的图形有关。在进行技术设计和点位规划选取时,尽量选择交会角位于40度 - 120度之间交会。如果条件允许,尽可能增加控制点数量(≥2个),增加测回观测数,以便提高自由设站点的点位精度和可靠性。
(3)由于场地限制和所测图形的限制,采用自由设站加极坐标法监测码头等临水建筑物平面位移,优点是设站灵活、作业效率高,且精度可满足变形观测要求。
(4)由于自由设站法中设站灵活,精度可以满足变形观测要求,因此在水闸、基坑监测和滑坡监测等通视条件差的区域适用性较好。
参考文献:
[1]岳建平,方露,黎昵.变形监测理论与技术研究进展[J].测繪通报,2007(7):1-4.
[2]卫建东.现代变形监测技术的发展现状与展望[J].测绘科学,2007,32(6):10-13.
[3] 陈伟康,何巧,自由设站法在变形监测中的应用[J].测绘与空间地理信息,2014(7):197-199.
[4]陈伟汉,董宸奇,余俏,全站仪自由设站法精度分析及应用[J]中国科技信息,2008(5):64-66.
[5] 由迎春,王岩,刘茂华.自由设站法在地铁保护监测中的应用及精度分析[J].测绘通报,2016(S):175-176.
[6]王庆,于先文,顾及已知点精度的自由设站算法及精度分析[J]东南大学学报(自然科学版),2009,39(2):372-376.
[7]华锡生,黄腾.精密工程测量技术及应用[M].南京:河海大学出版社,2002.
[8]王洪,全站仪自由设站法精度分析及应用研究[J]测绘与空间地理信息,2016,39(4):82-85.
[9]金建平,赵仲荣.自由设站法在深基坑水平位移监测中的应用与分析[J]勘察科学技术,2008(5):55-58.
[10] 梁志强.自由设站法在基坑水平位移监测中的应用[J].矿山测量,2015,43(3):23-25.
(编辑:唐湘茜)
