异步电机四象限驱动系统的线性自抗扰与滑模控制
2019-09-10张晖鹏于海生刘旭东吴贺荣
张晖鹏 于海生 刘旭东 吴贺荣


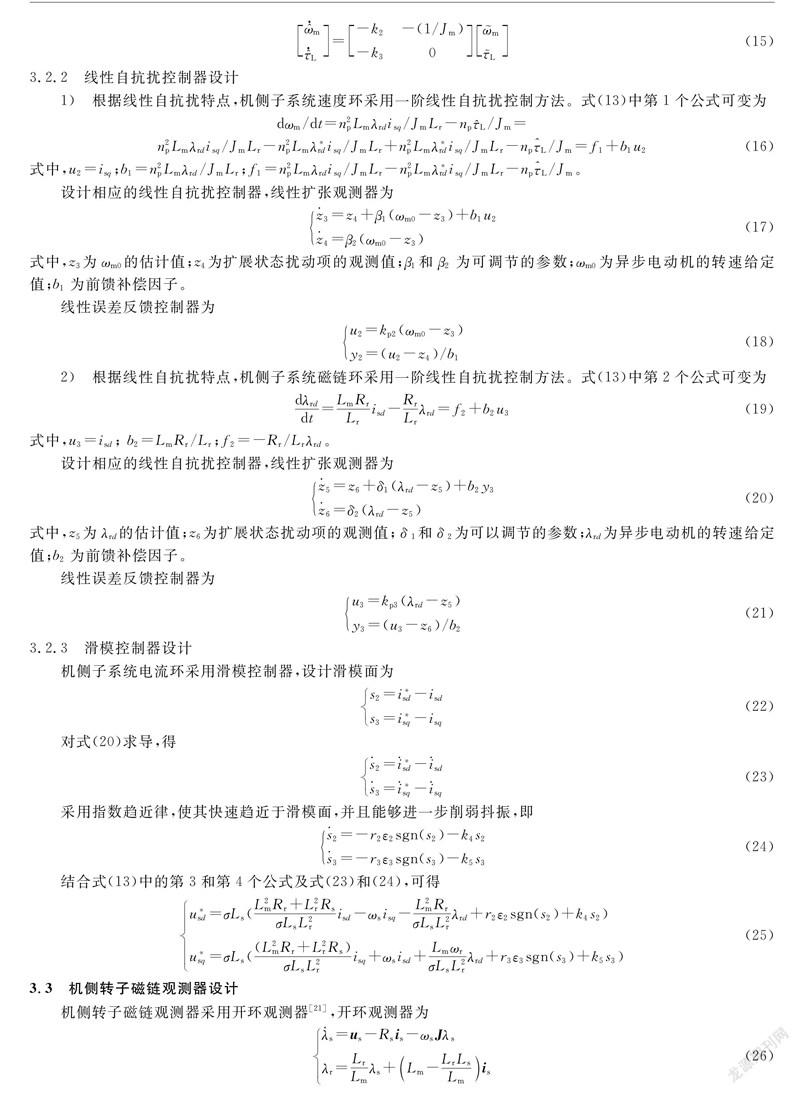
摘要: 为了实现背靠背变流器和异步电机驱动系统的四象限运行、能量双向流动、网侧单位功率因数、直流母线电压可控,本文采用线性自抗扰控制和滑模控制相结合的控制策略。网侧变流器电压环采用线性自抗扰控制,电流环采用滑模控制,提升了网侧子系统的抗干扰能力;机侧变流器速度环及磁链环采用线性自抗扰控制,电流环采用滑模控制,保证了网侧子系统的直流母线电压恒定时再进行机侧子系统的起动。异步电机四象限运行开始时存在较大电压超调的问题,采用网侧子系统电压软给定方法,减小电压超调。对于负载转矩未知的情况,采用负载转矩观测器进行观测。仿真结果表明,该控制系统实现了异步电机的四象限运行,对异步电机的未知负载转矩值跟踪快速且精确,实现了异步电机四象限驱动系统在单位功率因数下运行,线性自抗扰与滑模控制能很好地保证网侧直流电压达到给定值,并保持恒定,虽然在电机状态切换时,直流母线电压有波动,但很快恢复到给定值,电压定向控制存在一定的稳态误差,且误差随电机状态的切换越来越大。该研究在工业传动领域具有广阔的应用前景。
关键词: 异步电机; 四象限; 滑模控制; 线性自抗扰控制; 电压软给定
中图分类号: TP273+.2; TM343 文献标识码: A
随着电力电子技术的发展,背靠背变流器作为异步电机的主控电路,在工业传动领域得到快速发展[12]。传统的异步电机驱动系统,网侧由不可控变流器组成,存在着直流母线电压不可控、能量不能进行双向流动、运行时功率因数较低的缺点。异步电机四象限驱动系统具有四象限运行、能量可以双向流动并能够在网侧单位功率因数运行的优势[3]。近年来,异步电机四象限驱动系统在国内外得到快速发展,在列车运行时,采用大功率四象限变流器将再生能量送到中压交流电网上,具有良好的节能效果[45]。在矿井提升机、热源厂汽轮机、离心机等系统中,传统的电机二象限运行既增加了运行成本,又消耗了能量,采用电机四象限驱动系统,实现了电能的绿色变换[67]。异步电机四象限驱动系统存在着非线性、强耦合、多变量的特性,传统的控制方法很难实现良好的控制性能[810]。目前国内外学者在该领域采用了许多新型的控制方法。Zheng P等人[1112]提出了基于电网电压导向控制,增强了异步电机驱动四象限系统动态性能,四象限驱动系统提取有功功率,并通过采用有源前端转换器将其发送回电网,提高了网侧的功率因数;宋晓阳等人[1314]采用模糊自适应控制方法,提高了转速跟踪性能,但结构复杂,在实际应用中很难实现;Shao M L等人[15]提出了单神经元和反步控制相结合的控制策略,提高了电流跟踪能力,但直流母线电压存在超调;韩京清[16]提出了自抗扰控制方法,且线性自抗扰技术具有结构简单、参数易于调节的优点。虽然滑模控制具有较强的抗干扰性,但在网侧子系统刚启动时存在电压超调的问题。因此,本文采用直流侧电压软给定方法,抑制较大的电压超调,保证系统的正常运行。在实际运行中,针对负载转矩未知的问题,设计负载转矩观测器,并采用线性自抗扰和滑模相结合的控制方法,实现直流母线电压可控、异步电机四象限运行的能量双向流动及单位功率因数下运行,将本文所提出的控制方法与网侧子系统采用电压定向控制、机侧子系统采用磁场定向控制进行比较研究。仿真结果验证了所设计的控制策略具有良好的性能。
1 系统的整体方案设计
基于背靠背变流器的异步电机四象限驱动系统,主要由网侧子系统和机侧子系统两部分组成,系统控制原理图如图1所示。
2 网侧子系统的数学模型与控制
网侧子系统采用线性自抗扰和滑模相结合的控制策略。控制目标是保证网侧单位功率因数运行,即i*gq=0,直流母线电压可控,能量实现双向流动。
2.1 网侧子系统的数学模型与控制
2.2 网侧子系统控制器设计
2.2.1 线性自抗扰控制器设计
网侧子系统电压环采用线性自抗扰控制器。线性自抗扰由扩张状态观测器、线性误差反馈控制器和微分跟踪器3部分组成[18]。采用一阶线性自抗扰控制方法,状态观测器环节中没有微分输出,因此不需要微分跟踪环节的微分输出,所以在一阶系统中可以忽略微分跟踪器。假设网侧整流桥的桥路没有损耗,依据能量守恒,系统交流侧的功率等于直流侧的功率。按照等量坐标进行变换,则
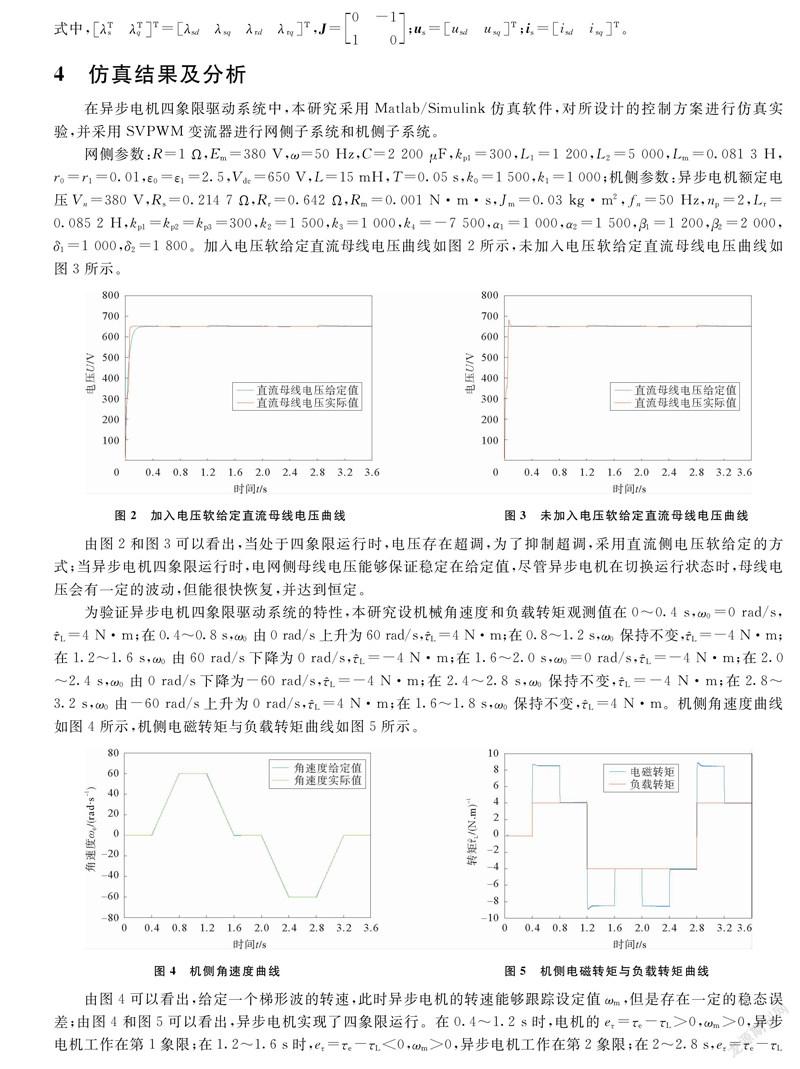
由图6可以看出,负载转矩观测器对异步电机的未知负载转矩值跟踪快速且精确;由图7可以看出,在系统运行过程中,网侧的q轴电流分量igq接近于0,即网侧的无功功率为0,网侧的d轴电流分量igd为正,因此实现了异步电机四象限驱动系统在单位功率因数下运行。
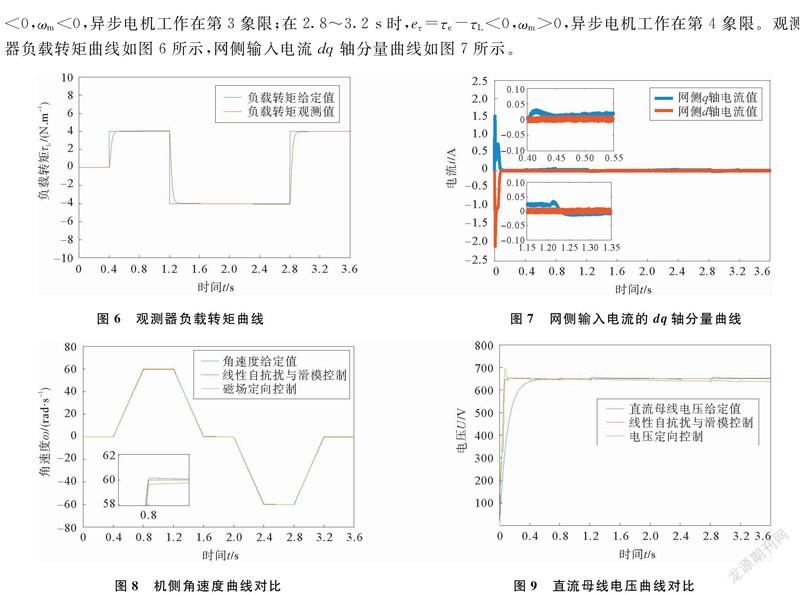
将异步电机四象限驱动系统线性自抗扰与滑模控制相结合的控制方法,与网侧子系统采用电压定向控制、机侧子系统采用磁场定向控制进行对比。机侧角速度曲线对比如图8所示,直流母线电压曲线对比如图9所示。
由图8可以看出,当异步电机驱动系统运行时,线性自抗扰与滑模控制能快速跟踪角速度的给定值,磁场定向控制跟踪速度与精度性较差;由图9可以看出,当异步电机驱动系统运行时,线性自抗扰与滑模控制能很好地保证网侧直流电压达到给定值,并保持恒定,虽然在电机状态切换时,直流母线电压有波动,但很快恢复到给定值。电压定向控制存在一定的稳态误差,且误差随电机状态的切换越来越大。
5 结束语
本文主要对基于背靠背变流器的異步电机四象限驱动系统进行研究。采用线性自抗扰控制和滑模控制相结合的方法,实现了四象限运行、直流母线电压可控、能量双向流动、网侧单位功率因数的预期目标;网侧子系统采用电压软给定线性自抗扰控制和滑模控制相结合的控制方法,提高了动态、稳态性能和抗干扰能力。机侧子系统采用了线性自抗扰控制和滑模控制相结合的控制方法,提高了对异步电机转速的快速跟踪能力;采用电压软给定的方法,解决了网侧电压出现较大超调的问题;采用负载转矩观测器,实现了对未知负载的快速跟踪和观测。将本文采用的方法与网侧子系统采用电压定向控制、机侧子系统采用磁场定向控制进行比较。仿真结果证明本文设计的控制策略具有良好的性能。该研究具有广阔的应用前景。
参考文献:
[1] Zhou D H, Zhao J, Liu Y. Finitecontrolset model predictive control scheme of threephase fourleg backtoback converterfed induction motor drive[J]. IET Electric Power Applications, 2017, 11(5): 761767.
[2] Elfadili A. Adaptive nonlinear control of induction motors through AC/DC/AC converters[J]. Asian Journal of Control, 2012, 14(6): 14701483.
[3] Heising C, Bartelt R, Oettmeier M, et al. Analysis of singlephase 50kW 16.7Hz PIcontrolled fourquadrant lineside converter under different grid characteristics[J]. IEEE Transactions on Industrial Electronics, 2010, 57(2): 523531.
[4] Marinkov S, Jager B D. Fourquadrant control of 4/2 switched reluctance machines[J]. IEEE Transactions on Industrial Electronics, 2016, 63(12): 73937403.
[5] Restrepo M, Canizares C, Kazerani M. Threestage distribution feeder control considering fourquadrant EV chargers[J]. IEEE Transactions on Smart Grid, 2016, 9(4): 3736 3747.
[6] Fan Y X, Yan G, Zou H Q, et al. Development of realtime simulation application software for fourquadrant converter system based on MATLAB[J]. International Journal of Software Engineering & Knowledge Engineering, 2018, 28(4): 523535.
[7] Magri A E, Giri F, Abouloifa A, et al. Robust control of synchronous motor through AC/DC/AC converters[J]. Control Engineering Practice, 2010, 18(5): 540553.
[8] Zhong Q C. AC Ward Leonard drive systems: Revisiting the fourquadrant operation of AC machines[J]. European Journal of Control, 2013, 19(5): 426435.
[9] Benchabane F, Bennis O, Yahia K, et al. Direct field oriented control scheme for space vector modulated AC/DC/AC converter fed induction motor[J]. Frontiers in Energy, 2012, 6(2): 129137.
[10] Hossain S, Husain I, Klode H, et al. Four quadrant and zero speed sensorless control of a switched reluctance motor[J]. IEEE Industry Applications Society, 2003, 39(5): 16411646.
[11] Zheng P, Liu R R, Wu Q, et al. Magnetic coupling analysis of fourquadrant transducer used for hybrid electric vehicles[J]. IEEE Transactions on Magnetics, 2007, 43(6): 25972599.
[12] Arias A, Ortega C, Zaragoza J, et al. Hybrid sensorless permanent magnet synchronous machine four quadrant drive based on direct matrix converter[J]. International Journal of Electrical Power & Energy Systems, 2013, 45(1): 7886.
[13] 郭磊磊, 金楠, 韓东洋. 背靠背永磁直驱风电变流器共模电压抑制方法[J]. 电机与控制学报, 2018, 22(6): 8190.
[14] Dida A, Benattous D. Modeling and control of DFIG through backtoback five levels converters based on neurofuzzy controller[J]. Journal of Control Automation & Electrical Systems, 2015, 26(5): 506520.
[15] Shao M L, Yu H S, Yu J P, et al. Four quadrant PMSM drive system via single neuron adaptive control and backstepping[J]. ICIC Express Letters, 2016, 10(2): 433438.
[16] 韩京清. 自抗扰控制技术[M]. 北京: 国防工业出版社, 2008.
[17] Dannehl J, Wessels C, Fuchs F W. Limitations of voltageoriented PI current control of gridconnected PWM rectifiers with, filters[J]. IEEE Transactions on Industrial Electronics, 2009, 56(2): 380388.
[18] 曾岳南, 郑雷, 周斌, 等. 线性自抗扰控制技术在PWM整流器中的应用[J]. 电力电子技术, 2016, 50(8): 1315.
[19] 李永东. 交流电机数字控制系统 [M]. 2版. 北京: 机械工业出版社, 2012.
[20] 刘刚, 陈涛, 严干贵. 背靠背四象限变流器的控制系统设计[J]. 电力电子技术, 2007, 41(11): 13.
[21] Yu H, Yu J, Liu J, et al. Nonlinear control of induction motors based on state error PCH and energyshaping principle[J]. Nonlinear Dynamics, 2013, 72(1/2): 4959.
