激光跟踪仪滑轨测量精度分析
2019-07-05胡玉坤张文峰彭攀
胡玉坤,张文峰,彭攀
(宁波市测绘设计研究院,浙江 宁波 315042)
1 引 言
近年来,在精密制造、装配及检测等工业测量和精密工程测量领域,激光跟踪仪以其测量速度快、精度高、测量范围大的优点得到了广泛应用,被称为移动的三维坐标测量机。激光跟踪仪的本质是一种球坐标测量系统,其基本原理是测量目标点的距离及水平和垂直方向的偏转角,建立以测站为中心的极坐标系。距离分量由激光干涉仪测量,角度分量由高精度角度编码器测量[1,2]。
激光跟踪仪通常有两种测量模式:一是单站测量,测量所有目标(FARO激光跟踪仪测量半径为 60 m);二是转站测量,通常在长距离测量以及通视条件不好时使用。一般利用3个以上的公共点以及一定数量的检核点通过光速法平差原理建立相邻站间的姿态及定向关系,避免换站造成的误差累计[3~10]。
本文运用Leica TM30全站仪和FARO激光跟踪仪对某大学多功能船模拖拽水池试验场地基准桩进行了测量,比对其调轨精度,验证了激光跟踪仪滑轨测量平面精度可达到 0.5 mm,说明了激光跟踪仪在高精度滑轨测量中是可行的。
2 测量原理
从功能上来说,激光跟踪仪相当于高精度且具有自动、快速跟踪功能的全站仪。其对空间目标的坐标测量是通过测量目标点的水平角、垂直角和斜距,然后按球坐标或极坐标测量原理求出空间点的三维坐标x、y、z。如图1所示,在球坐标测量系统中,设跟踪器的旋转中心为O点,被测靶球的中心为P点。
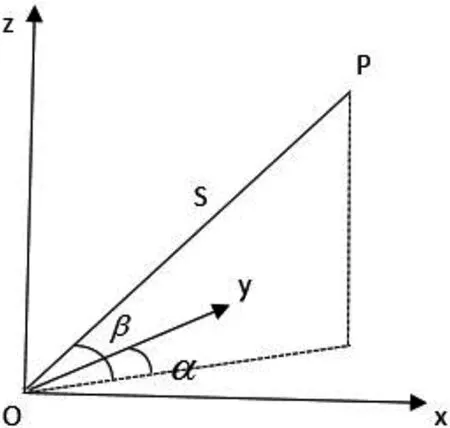
图1 激光跟踪仪坐标测量原理
用两个角度编码器分别测量出P点的垂直角和水平角,用激光干涉仪测量O点到P点的距离d,则P点坐标刻有式(1)得出。
(1)
3 实验分析
3.1 实验研究对象
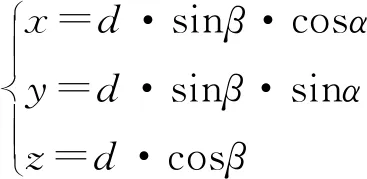
实验基于某大学多功能船模拖拽水池试验场地基准桩进行。2015年12月,采用Leica TM30和Trimble水准仪完成了基准点强制归心装置的安装放样及精密测量工作,点位放样精度达到 3 mm,高程精度达到 1 mm。定义了当地坐标系,1号点为坐标系原点,x轴与滑轨平行,基本指北,y轴指东,z轴垂直向上,构成左手坐标系。基准桩个数共计12个,多功能船模拖拽水池试验场示意图如图2所示。
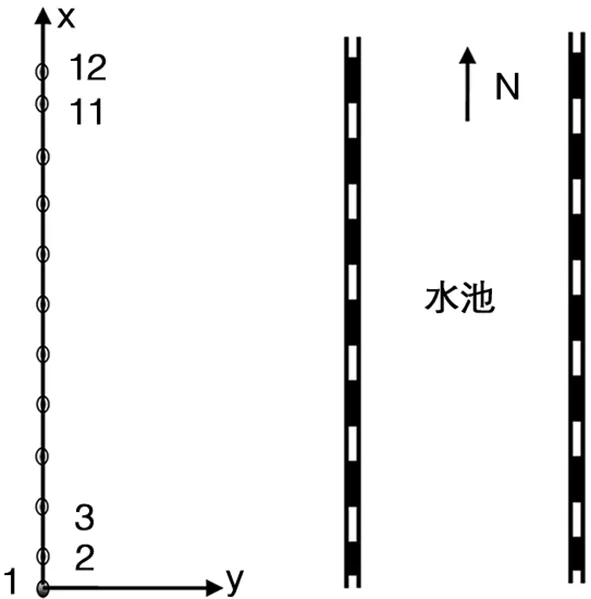
图2 多功能船模拖拽水池试验场示意图
3.2 跟踪仪和全站仪测站布设方案
为验证激光跟踪仪滑轨测量精度,2016年4月,采用Leica TM30和FARO激光跟踪仪对基准桩进行了复测,对上次的安装位置进行了微调,并利用激光跟踪仪测量与全站仪测量进行互相检核。图3为多功能船模拖拽水池试验场地。

图3 多功能船模拖拽水池试验场地
现场总共有12个控制点,全站仪调轨时,鉴于现场光照条件等影响,于点7设站,以点5后视,采用方位角定向,逐点放样。在放样时要求点5保持不动,最佳直线过点7。FARO激光跟踪仪最大测距范围为 60 m,现场每两点间距约为 30 m,为满足激光跟踪仪测量要求,实验中依次设站于点2点3间、点4点5间、点6点7间、点8点9间、点10点11间。
3.3 实验数据处理与结果分析
全站仪调轨时发现现场大部分控制点基本只能往一边调节,说明初始点位偏移较大,这就给放样直线增加了难度。分析发现点9、点10、点12变化较大,已不可调节,且点9、点10只能往水池方向调节(图中右方),故将点12重新焊接,为了尽量减少焊接所引起的不必要误差,将其余点集体往墙面方向调节 7 mm(图中左方)。然后设站点7,以点2后视,方位角定向方法放样。可得最佳直线方位角4.6″。表1为放样后各点方位角,图4为全站仪调轨后点位与最佳直线的关系及残差图。

放样后方位角 表1
为了尽量减少激光跟踪仪换站误差的累积,每次换站设4个换站点,并保证4个换站点间的空间距离足够大。换站后复测发现X方向与Y方向误差在 0.5 mm以内,Z方向误差在 1 mm以内。图5为跟踪仪调轨后点位与最佳直线的关系及残差图。
图4全站仪调轨后点位与最佳直线的关系及残差图

图5 跟踪仪一次调轨后点位与最佳直线的关系及残差图
由图5可以看出点1、点9、点12超出了限差 1 mm,故应当重新放样。图6为跟踪仪二次调轨后点位与最佳直线的关系及残差图。
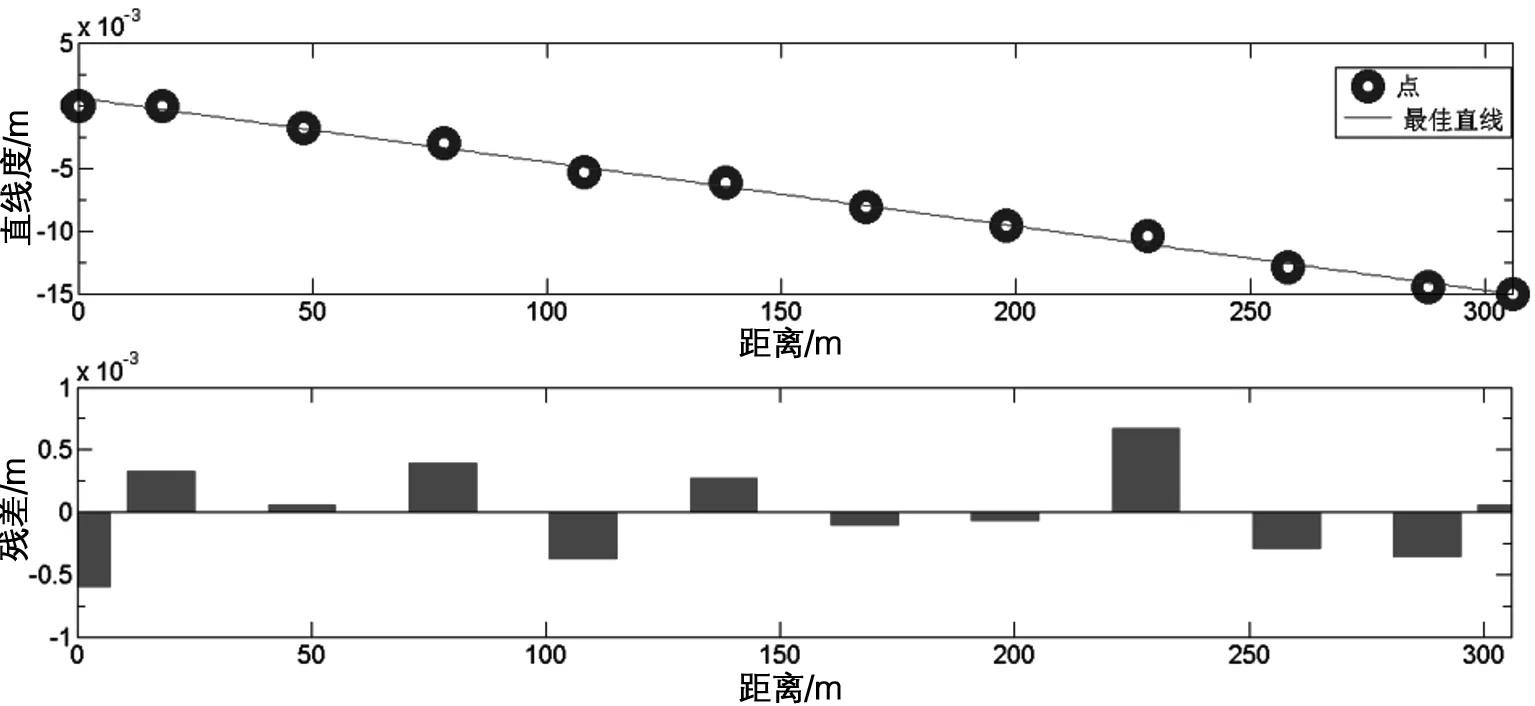
图6跟踪仪二次调轨后点位与最佳直线的关系及残差图
由图4~图6可以看出,全站仪调轨后与最佳直线的残差最大为 1.6 mm,跟踪仪一次调轨后与最佳直线的残差最大为 -2.6 mm,跟踪仪二次调轨后与最佳直线的残差最大为 +0.5 mm。说明X方向与Y方向(图1中所示轨道方向与水池方向),精确到了 0.5 mm以内,完全满足 1 mm的精度要求。下对跟踪仪二次调轨坐标与全站仪坐标进行对比分析,以验证跟踪仪滑轨测量精度。
由于全站仪测量时以点7为原点,以点7与点2确定的直线为X轴建立左手坐标系;跟踪仪测量时以点1为原点,以仪器面为XY面,以仪器面的垂线为Z轴建立右手直角坐标系。因此需要将二者转换到当地坐标系。转换时利用点1~点11,11个点根据布尔莎-沃尔夫(Bursa-wolf)模型运用最小二乘转换。转化结果与较差如表2所示:
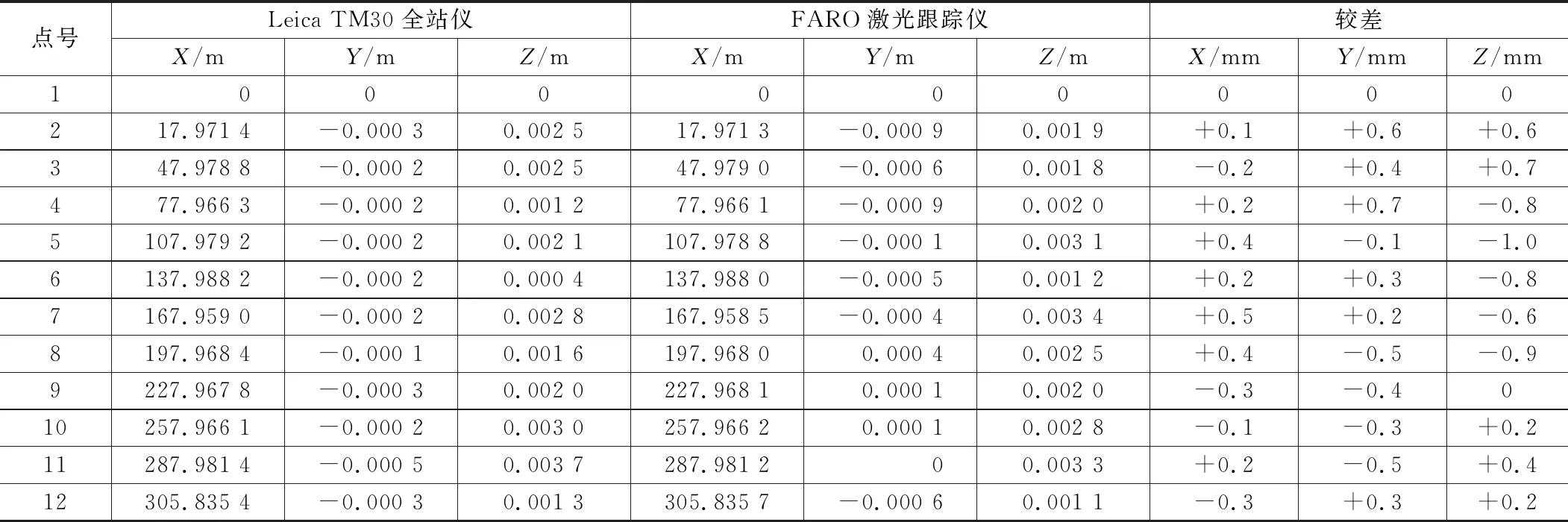
跟踪仪与全站仪坐标对比表 表2
由表2可以看出:转换后TM30全站仪与FARO激光跟踪仪的较差,X方向最大为 0.5 mm,Y方向最大为 0.7 mm,均在测量误差范围内。实际操作中可用全站仪辅助激光跟踪仪调轨以起到检核作用。
4 结 论
激光跟踪仪具有测量精度高、实时快速、动态测量、便于移动等优点,大量应用于精密制造、装配及检测等工业测量和精密工程测量领域。本文运用Leica TM30全站仪和FARO激光跟踪仪对某大学多功能船模拖拽水池试验场地基准桩进行了测量,比对其调轨精度,验证了激光跟踪仪滑轨测量平面精度可达到 0.5 mm,说明了激光跟踪仪在高精度滑轨测量中是可行的。
