基于空三成果的航摄影像快速配准方法研究
2019-07-05答星周勇兵朱传勇徐夏炎滕松
答星,周勇兵,朱传勇,徐夏炎,滕松
(武汉市测绘研究院,湖北 武汉 430022)
1 引 言
航空摄影利用航空器搭载专业航摄仪从空中对地面进行摄影,因其获取速度快、几何分辨率高,成为地理信息数据获取的主要技术手段[1]。航空摄影测量在我国起步较早,相关部门积累了大量历史航空影像资料,以基础测绘的4D产品形式服务于城市规划建设、自然资源调查、地质资源勘探等领域。特别是城市勘测院积累的大比例尺历史航摄资料数据量日益增大、各类参数较多,传统以文档式管理或电子文件夹式存储的模式,难以实现原始影像数据的快速调用,利用空间数据库统一管理已成为目前主流模式。
航摄资料数据库需实现对原始航摄影像数据的空间定位管理,以利于空间查询等资料索引的需求。常用的影像配准方法包括正射纠正法和竖直投影法。正射纠正法是通过摄影测量理论或者图像匹配技术,前者主要采用数字摄影测量工作站[2]进行,后者是依据计算机视觉理论,常用的匹配算法有最小二乘匹配[3]、Forstner算法[4]、SIFT算法[5]、SURF算法[6]等。正射纠正法虽然能够获得较高精度,但解算过程复杂,实用性不强。竖直投影法是直接采用外方位线元素(或POS线元素)以及影像参数,即以摄站点竖直投影到地面的交点作为影像中心对应的物方点(下文简称物方中心点),再利用影像大小和分辨率获取其地面范围。该方法未考虑内方位元素、外方位角元素,配准精度会受到影像中心偏移、姿态旋转等因素影响,但数学模型简单,解算速度较快。
一些专家学者在竖直投影法的基础上做了改进,如孙海萍等利用像主点坐标、像幅宽度、像幅高度、摄影比例尺等信息估算影像四角点坐标,然后利用仿射变换完成影像空间配准[7]。但像主点坐标未利用影像的内外方位元素及DEM数据进行精度改正,尤其在影像边缘及地面起伏大的区域,与实际位置仍存在较大偏移的现象。本文充分利用现有航摄资料及空三成果,采用中心投影共线方程进行物方中心点坐标的解算,最后通过仿射变换方法进行影像坐标配准。经实验论证,其空间配准精度明显提高,较好满足航摄影像管理需求。
2 影像中心物方空间坐标解算
影像空间配准是航摄数据精细化管理关键步骤,最精确的方法为数字正射纠正,但纠正计算过程复杂,且增加纠正重采样数据的存储空间,耗时费力,此法不用于原始影像管理。通常具有空三成果的历史航摄影像会采取分类存储,即以磁盘存储原始影像,以文件方式保存空三成果。后期调用时,需利用航摄略图以及空三加密分区接合表进行资料索引。如将两者有机结合,则能快速实现影像的空间配准,即首先获取物方中心点平面坐标,然后通过平移或仿射变换进行空间配准。
2.1 竖直投影解算
物方中心点平面坐标获取是影像快速空间配准的首要步骤。目前主要获取方式是竖直投影解算法,如图1所示。该方法将航摄相机曝光瞬间记录的摄站点横纵坐标近似作为物方中心点的平面坐标。
图1中,S为摄影中心,c为影像中心点,C0为实际物方中心点,C1为竖直投影到地面的物方中心点。从图中可看出,若影像中心严格落在摄站点下方,即过影像中心摄影光线为竖直向下,其解算物方中心点误差较小(仅受线元素精度影响),若该摄影光线与竖直光线偏差较大时,其解算精度较差。造成精度较差的原因主要是其未考虑内、外方位角元素和地面起伏等因素,仅将航空摄影的中心投影成像简单视为竖直投影成像。
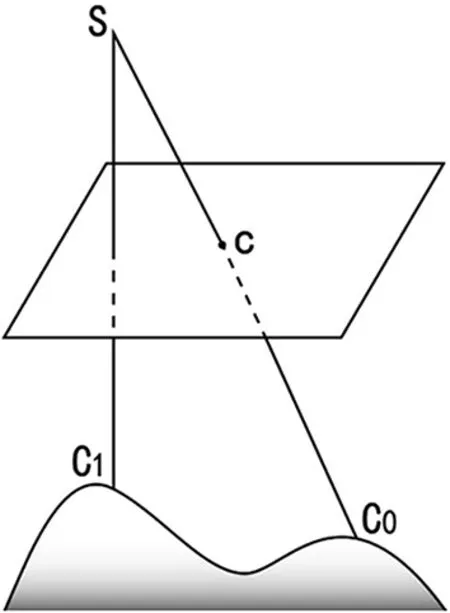
图1 竖直投影解算法示意图
2.2 中心投影解算
(1)中心投影解算原理
为提高物方中心点坐标解算精度,可采用空三成果中内、外方位元素,利用中心投影共线方程解算物方坐标,即摄影光线经影像中心与地面高程面的交点作为物方中心点。拍摄姿态俯仰角较大的影像,其解算后的物方中心点配准精度更易受高程精度的影响。快速获取高程方法有两种:根据航摄比例尺和摄站点高程计算;利用测区DEM数据迭代提取。中心投影共线方程描述了投影中心、像点、物点三点位于一条直线的关系,公式如下。
式中,x,y为像点的框标坐标,XA、YA、ZA为物点的物方空间坐标,x0、y0、f为影像内方位元素,XS、YS、ZS为摄站点物方空间坐标,ai、bi、ci(i=1,2,3)为影像外方位元素组成的方向余弦。
(2)实现方法和设计路线
通过共线方程解算物方中心点空间坐标,至少需要两张相片进行前方交会。前方交会需要进行影像匹配和量测,计算过程复杂。本文采用单片过影像中心摄影光线和高程面相交的方法解算物方中心点平面坐标,并通过以下两种方法获取物方中心点的高程。
①固定比例尺法:利用航摄资料中的摄影比例尺、摄站点高程计算物点的平均高程,以该平均高程作为物方中心点的近似高程值,公式为ZA=ZS-scale×f。其中,ZA为物方中心点高程,ZS为摄站点高程,scale为航摄比例尺,f为相机主距。
程序设计路线:读取相片大小、扫描分辨率、航摄比例尺以及内外方位元素等参数,利用公式解算物点平均高程,以平均高程作为物方中心点高程,并代入共线方程解算物方中心点平面坐标。
②DEM迭代法:采用DEM提取物方中心点高程,过影像中心摄影光线和DEM曲面相交的物点即为物方中心点。由于物方中心点高程是共线方程解算其平面坐标的条件之一,而利用DEM提取物方点高程又必须提供其平面坐标值,因此该方法是一个迭代趋近的过程,迭代之前可将固定比例尺法获取的物方点平均高程作为计算迭代的初始值。
程序设计路线:除固定比例尺法参数外,还需读取测区DEM数据。该方法需迭代进行解算,其程序框图如图2所示。

图2 DEM迭代法程序框图
3 仿射变换空间配准
经共线方程计算处理后的原始影像可获取精度较高的物方中心点平面坐标,在此基础上,通过摄影比例尺、像元大小、影像宽高等参数,能够快速计算出影像四个角点的地面坐标,从而生成原始影像的坐标文件。影像坐标文件实际上定义了影像像素坐标与实际地理坐标间的仿射关系,具体计算公式如下。
x′=Ax+By+C
y′=Dx+Ey+F
式中,x′为像素对应的地理X坐标,y′为像素对应的地理Y坐标,x和y分别代表像平面坐标中的列号和行号,A和E分别x方向上和y方向上的像素分辨率,D和B分别为X和Y方向的旋转系数,C与F为影像左上角像素的地理X坐标与Y坐标。
常规无坐标影像进行快速空间配准时若不考虑旋转情况,D和B参数为零,仅需计算出角点地理坐标,便能重写出坐标文件。原始影像的旋偏角是衡量航摄质量的重要参数之一,因此可对原始影像基于中心点旋转,通过重新计算A~F参数,无须对原始影像文件进行重采样处理,避免冗余数据产生。为解决这一问题,将旋转前后点与旋转角点看作等腰三角形,如图3所示。假设矩形影像的左上角点(X1、Y1),绕其中心(X0、Y0)逆时针旋转a角度后,新角点坐标位置(X2、Y2)则作为新的坐标文件中C和F参数,计算公式如下。
X2=(X1-X0)cosθ-(Y1-Y0)sinθ+X0
Y2=(X1-X0)sinθ+(Y1-Y0)cosθ+Y0
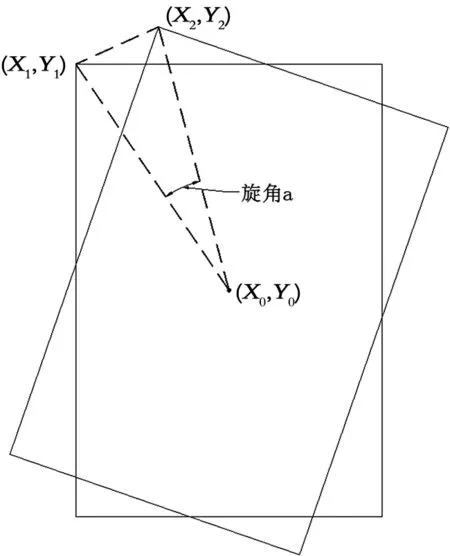
图3 仿射变换示意图
原始影像中的每一像元均可看作长宽为地面分辨率的正方形,而影像本身沿中心点旋转过程并不改变像元长宽本身大小,如图4所示。因此,其旋转后新的旋转参数应相等且不为零,如图4所示。
B=D=原影像地面分辨率×sinα
A=-E=原影像地面分辨率×cosα

图4 影像空间配准示意图
4 实验论证
4.1 实验过程
本次实验数据为武汉市2010年利用瑞士徕卡公司研制的UCX相机对中心城区及远城区重点区域共计 3 412 km2进行大比例尺航空摄影,用以 1∶2 000基础测绘4D产品生产。同年采用Z/I Imaging SSK软件对整个测区 6 216张影像按自然地形分划为12个加密区进行空三加密,最终空三成果以文件夹形式保存,UCX摄影参数如表1所示。

UCX摄影参数 表1
对加密成果区中的Photo定向文件及Camera相机进行信息提取,获取每张影像的内、外方位元素、相机参数等信息。在ArcGIS软件中将DEM影像数据转换为DEM文本数据,便于后期程序进行高程提取。利用Python和Arcpy站点包进行程序开发,批量计算出原始影像的地面矩形覆盖范围(SHP格式)及原始影像坐标文件TFW,并将整理后单张影像的影像内、外方位元素等基本信息写入到图形文件属性中,便于原始影像检索。经计算后的原始影像图形文件如图5所示。

图5 经计算后的原始影像图形文件
4.2 精度对比与分析
对实验影像分别采用竖直投影法、中心投影法(固定比例尺、DEM迭代)进行影像空间配准,将配准后影像与区域内现有矢量数据叠加进行检验,并选取平原与丘陵两种局部区域成果进行对比,如图6所示。

图6局部成果对比图
从目视判读来看,中心投影法配准的影像与现有矢量数据空间配准度明显优于竖直投影法。在影像中选取若干特征点,计算其与实际位置的偏移值,得到精度统计如表2所示。

精度统计列表 表2
从表2看出,中心投影方法的精度明显优于竖直投影法,其中DEM迭代法又更加优于固定比例尺法。主要原因是航摄瞬间的摄影比例尺无法完全固定,其实际比例尺会随着地形起伏或飞行航高变化而在一定区间内浮动所致。
中心投影法进行影像空间配准分为物方中心点解算和仿射变换空间配准两步。在初始比例尺较为准确的情况下,中心点坐标精度较高(实验中一般<1 m)。而影像空间配准采用仿射变换完成,通过物方中心点坐标、影像旋片角、地面分辨率、影像宽度及高度解算影像左上角物方空间坐标,地面分辨率则直接采用扫描分辨率和初始比例尺的乘积,没有考虑区域内地形起伏的影响,因此导致影像的空间配准精度呈“中间高,四周低”的特点。
5 结论与展望
基于摄影测量相关理论,利用现有空三成果,本文提出一种针对原始航摄影像的快速空间配准方法。其核心思想为通过摄影光线与高程面相交获取影像中心物方空间坐标,再利用仿射变换进行影像空间配准。经利用2010年UCX航摄影像实验表明,其精度明显优于竖直投影方法,满足航摄影像管理需要,且解算速度快,无须对原始影像进行重采样处理。对于无人机等飞行姿态较为不稳定的原始影像,更加利于推广使用。当然,该方法尚有不足之处,即影像边缘处和地形起伏较大区域的精度较差,后续再做改进。
