基于卫星立体双介质的浅海水深测量方法
2019-06-19杜娟曹彬才陈世媛
杜娟 曹彬才 陈世媛
摘 要: 利用双介质摄影进行浅海水深测量存在可行性差、精度不高的问题,提出一种基于卫星立体双介质的浅海水深测量方法。通过理论分析同名光线在空气和水两种介质中传播的几何结构,推导水下点垂直坐标折射改正的基本公式,基于三沙甘泉岛WorldView?2多光谱立体影像开展实验,验证了立体双介质的精度。结果表明,所提立体双介质浅海水深测量方法在5~20 m的水深范围内能取得低于18%的相对误差,在水深小于5 m的水深范围内相对误差变大。
关键词: 高分辨率遥感影像; 双介质摄影测量; 水下地形; 折射改正; 密集匹配; 测深精度
中图分类号: TN98?34; P237 文献标识码: A 文章编号: 1004?373X(2019)11?0158?03
Abstract: Since the two?media photogrammetry used to perform shallow water bathymetry has the shortages of poor feasibility and low accuracy, a shallow water bathymetry based on satellite?borne two?media photogrammetry is proposed. The geometric structure of the same?name light propagation in air and water is analyzed theoretically to deduce the basic formula of refraction correction for vertical coordinates of underwater points. The experiment is conducted for WorldView?2 multispectral stereoscopic imagery of Ganquan Island in Sansha City to verify the accuracy of stereoscopic two?media photogrammetry. The experimental results indicate that the shallow water bathymetry based on satellite?borne two?media photogrammetry can obtain the relative error lower than 18% within the water depth of 5~20 meters, but the relative error becomes bigger when the water depth is lower than 5 meters.
Keywords: high?resolution remote sensing imagery; two?media photogrammetry; underwater topography; refraction correction; dense image matching; bathymetry accuracy
0 引 言
浅海水深数据是重要的基础地形空间信息,准确、高效、经济地获取浅海水深数据是海洋测绘追求的目标。双介质摄影测量利用在空中拍摄的立体光学影像直接解算水下目标的几何信息,同主流的测深手段(如船载声呐、激光雷达等)相比更加高效经济,缺点是测深精度相对较差,仅适合于诸如水深信息普查等要求相对较低的应用场合。双介质摄影测量的相关研究开展较早,其基本原理、构像方程等均有阐述[1?3],该技术有少量的实际应用案例[4?6]但未见详细的精度分析。本文以文献[7]的研究为基础,使用WorldView?2多光谱立体影像数据开展浅海立体双介质测深实验,并分析测深精度和误差分布,为卫星立体双介质测深的实际应用提供参考。
1 双介质摄影测量折射改正
出于简化问题的考虑,此处假设两点:小范围内水质均匀,即水体折射率视为常数;水面为平面,即不考虑存在波浪时法线不垂直造成的点位偏移。
光线从一种介质进入另一种介质遵循折射定律:
图1 双介质摄影测量基本几何关系
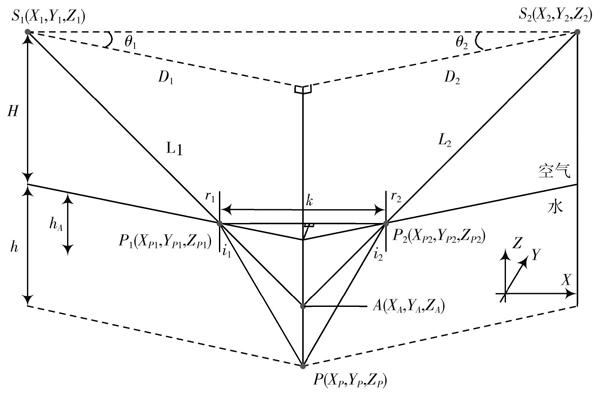
最后,将式(2)~式(5)以及式(8)代入式(6)便可获得目标点真实水深值[h]。以上描述了如何由摄影测量观察点[A]获得实际水下点[P]的过程,实际开展双介质摄影测量时,还需要使用立体像对计算水下目标的观察坐标,该过程与常规的摄影测量一致,主要包含几何预处理、辐射预处理、同名点匹配和前方交会等步骤,完整的立体双介质测深流程参照文献[7]。
2 双介质测深实验
2.1 实验数据
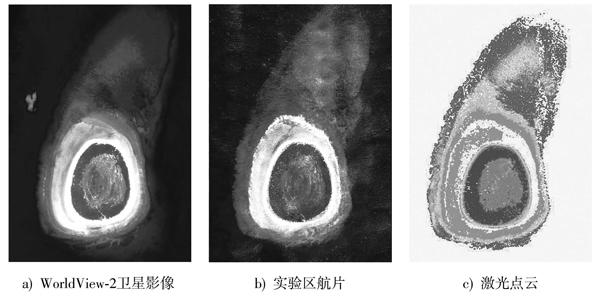
本文选择海南省三沙市甘泉岛附近浅滩涂水域作为实验区域,遥感影像采用WorldView?2卫星4波段多光谱立体影像(如图2a)所示)。甘泉岛实验区南北长700 m,东西宽500 m,水域面积约0.3 km2,包含有沙滩、礁盘等不同地质,礁盘人眼可见的最大水深为17 m。实验立体影像的成像时间为2014年4月2日,立体采集间隔为11 s,在该时间范围内,可认为立体像对的水面位置没有发生较大变化。水深控制数据方面,收集到甘泉岛SHOALS?3000激光雷达测深数据,采集时间为2013年1月19日。该型激光雷达测深系统在清洁水体的最大探测深度为50 m,水平精度为2.5 m,测深精度[9]为25 cm。通过人工比较WorldView?2卫星影像和激光雷达测深的航飞影像,发现其水边缘几乎一致,并且WorldView?2影像的平面精度和航片十分接近,因此可以不进行WorldView?2几何预处理,并且激光点云无需经过不同水面高程的转换,可直接用于检验双介质测深结果。
图2 甘泉岛实验数据及验证数据
2.2 遥感影像密集匹配
本文采用半全局匹配(Semi?Global Matching,SGM)算法[10]获得立体像对逐像素密集视差。SGM算法主要包含逐像素互信息计算、路径代价迭代计算、视差累计、视差计算及优化等步骤,本质是以多路径动态规划作为策略以获得全局能量最小化的匹配结果。
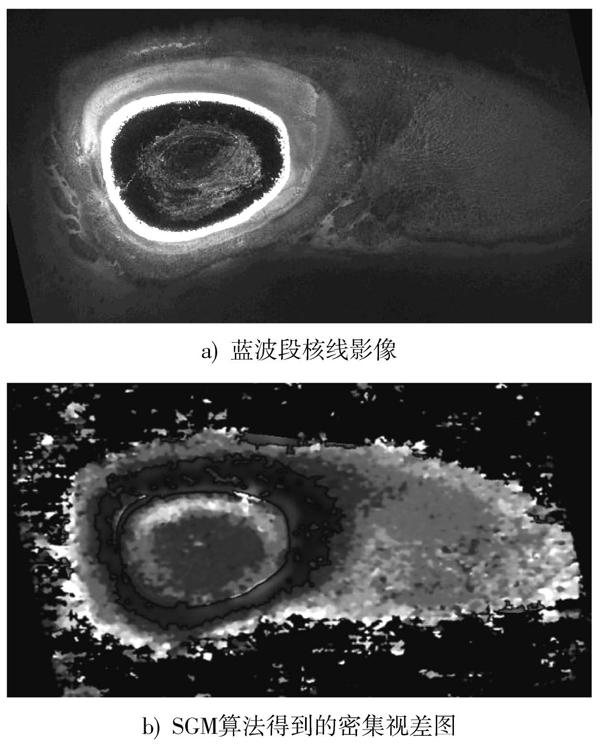
WorldView?2多光谱影像的波段设置为常规的4波段多光谱,其中蓝、绿波段对水体的穿透力较强,水下纹理清晰明显,因此,影像匹配可以仅仅在蓝、绿某单波段影像上进行(本文使用蓝波段)。需要指出,SGM算法只能处理核线影像,因此需要预先将原始影像采样为核线影像。如图3a)所示,由于WorldView?2影像具有良好的直线特征,经大量实验验证发现:WorldView?2影像旋转一定角度并上下平移一定像素就可以获得核线影像。图3b)是SGM算法得到的密集视差图。对于原始立体像对而言,需要基于核线视差来确定原始影像同名像点坐标,即[PL→PEL→PER→PR],其中[PL],[PR]表示左右原始影像的同名像点坐标,[PEL],[PER]表示左右核线影像上对应像点坐标,[PL→PEL],[PER→PR]分别为左原始影像到核线影像的变换以及右核线影像到右原始影像的变换,[PEL→PER]为利用视差图在列方向的变换。获得[PL],[PR]后,即可利用RFM前方交会公式求解三维坐标,利用大量同名点可构建原始DEM。
图3 核线影像与视差图
2.3 测深结果及精度验证
为了确定水面高度,使用NIR波段进行区域生长和边缘检测,识别出水陆分界线,在原始DEM中内插水陆分界线求出高程值作为水面高度,随后按照上文折射改正理论对水下点进行折射改正,处理结果如图4所示。利用激光点云进行测深精度分析,所得结果如表1所示。
图4 甘泉岛双介质测深结果

表1 甘泉島双介质测深精度分析
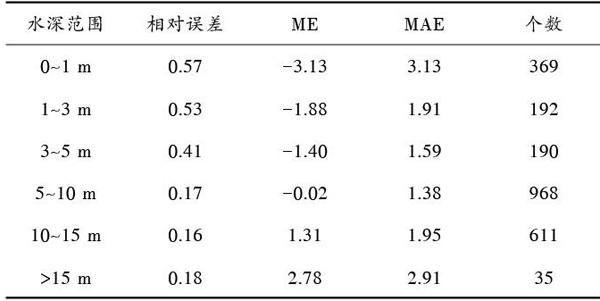
表1中ME,MAE分别表示平均误差和平均绝对误差,分析可知:使用本文的实验影像,在深度大于5 m的区域,立体双介质技术测深相对误差均小于18%,在深度小于5 m的区域,由于波浪较大导致所提方法的精度变得较差。
3 结 论
通过本文的理论分析和实验讨论,可得出如下结论:
1) 基于现阶段的几何模型和数据处理方法,使用高分辨率多光谱立体影像进行双介质浅水水深反演是可行的;
2) 立体双介质技术对成像条件要求较高,但具有无需水深控制点的优势,具备监测远海清澈岛礁水下地形的能力;
3) 立体双介质技术的测深精度与成像条件密切相关,总体上更适合于5~20 m区间的水深测量,测深精度较高。
本文采用的甘泉岛实验影像中有太阳耀斑,并且水面波浪清晰可见,具备海洋遥感成像的典型特征,因此本文的处理方法、流程以及精度结论具有较强的参考意义。需要指出,由于实测水深信息难以获取,缺乏更多的实验数据,未来还需进一步验证利用高分辨率立体影像进行水深测量的可行性。
参考文献
[1] BUTLER J B, LANE S N, CHANDLER J H, et al. Through?water close range digital photogrammetry in flume and field environment [J]. Photogrammetric record, 2002(17): 419?439.
[2] WESTAWAY R M, LANE S N, HICKS D M. Remote sensing of clear?water, shallow, gravel?bed rivers using digital photogrammetry [J]. Photogrammetric engineering and remote sen?sing, 2001, 67(11): 1271?1281.
[3] GEORGOPOULOS A, AGRAFIOTIS P. Documentation of a submerged monument using improved two media techniques [C]// Proceedings of 2012 the 18th International Conference on Virtual Systems and Multimedia. Milan, Italy: IEEE, 2012: 173?180.
[4] 刘善磊,赵银娣,李英成,等.POS数据用于双介质水下地形摄影测量的研究[J].测绘科学,2011,36(6):42?45.
LIU Shanlei, ZHAO Yindi, LI Yingcheng, et al. Analysis at underwater topographic two?media photogrammetry with POS data [J]. Science of surveying and mapping, 2011, 36(6): 42?45.
[5] 周高伟,李英成,任延旭,等.低空无人机双介质水下礁盘深度测量试验与分析[J].测绘学报,2015,40(5):548?554.
ZHOU Gaowei, LI Yingcheng, REN Yanxu, et al. Research of two?media underwater reefs depth measurement experiment based on low?altitude UAV [J]. Acta geodetic et cartographica sinica, 2015, 40(5): 548?554.
[6] CHONG A K, SCHNEIDER K. Two?medium photogrammetry for bottlenose dolphin studies [J]. Photogrammetric engineering and remote sensing, 2001, 67(5): 621?628.
[7] 曹彬才,邱振戈,朱述龙,等.高分辨率卫星立体双介质浅水水深测量方法[J].测绘学报,2016,45(8):952?963.
CAO Bincai, QIU Zhenge, ZHU Shulong, et al. Shallow water bathymetry through two?medium photogrammetry using high re?solution satellite imagery [J]. Acta geodetic et cartographica sinica, 2016, 45(8): 952?963.
[8] MURASE T, TANAKA M, TANI T, et al. A photogrammetric correction procedure for light refraction effects at a two?medium boundary [J]. Photogrammetric engineering and remote sensing, 2008, 74(9): 1129?1136.
[9] GEO3D. SHOALS?3000, hydrographic charting and more [EB/OL]. [2016?10?08]. http://www.geo3d.hr/download/shoals/SHOALS_3000.pdf.
[10] LLER H H. Accurate and efficient stereo processing by semi?global matching and mutual information [C]// 2005 IEEE Computer Society Conference on Computer Vision and Pattern Re?cognition. San Diego: IEEE, 2005: 807?814.