接触时间感知的移动WSNs路由
2019-06-15贺瑜飞马崛延卫军
贺瑜飞 马崛 延卫军
摘 要: 多数无线传感网络应用中需要处理节点移动性,为此,面向移动无线传感网络(M?WSNs),提出基于接触时间的区路由(CTAR)。CTAR路由先利用源节点和目的节点的相对位置信息形成活动区,只有区内的节点才能参与路由;然后,利用节点的移动矢量信息选择能够最大化接触时间的邻居节点作为下一跳转发节点。仿真数据表明,与RoF协议相比,CTAR协议的数据包传递率得到有效提高。
关键词: 移动无线传感网络; 路由; 活动区; 接触时间; 移动矢量; 转发节点
中图分类号: TN915?34; TPT393 文献标识码: A 文章编号: 1004?373X(2019)12?0161?04
Abstract: The node mobility needs to be processed in most applications of the wireless sensor network. Therefore, a contact time?area based routing (CTAR) is proposed for mobile wireless sensor networks (M?WSNs). In the CTAR, the relative position information of the source node and destination node is used to form the active region, and only nodes within the region are allowed to participate in routing. The mobility vector information of the node is used to select the neighbor node that can maximize the contact time as the next?hop forwarding node. The simulation data shows that the data packet delivery ratio of the CTAR protocol is effectively improved in comparison with that of the RoF protocol.
Keywords: mobile wireless sensor network; routing; active region; contact time; mobility vector; forwarding node
0 引 言
目前,移动无线传感网络(Mobile Wireless Sensor Networks, M?WSNs)广泛应用于健康监测、车辆跟踪等[1?2],而移动是这些应用的固有特性。为此,M?WSNs内的节点必须应对拓扑变化,但这增加了节点能耗[3]。M?WSNs的能效对节点寿命有决定性的影响,而采用休眠?唤醒机制是降低节点能耗,提高能效的有效方式[4]。除了能效问题,节点移动性是M?WSNs的研究热点。节点的移动性也给M?WSNs的节点部署提出挑战。
传统的路由协议引用路由表传输数据,但是,在移动的网络环境中[5],建立并维持路由表是非常复杂的。移动环境容易形成动态拓扑,而在动态拓扑结构中构建路由表非常困难,即使建立,也容易加大节点能量消耗。
目前,研究人员对M?WSNs的能效路由进行了不少的研究。文献[6]针对一维队列网络,分析最小化能量消耗问题,其目的在于通过有效地提高节点能量,进而最大化网络寿命,但是,文献[6]认为节点的位置是预知的、且不变化。文献[7]针对M?WSNs提出了能效?可靠路由协议,此协议为层次、簇协议,每个簇有一个簇头,其负责管理簇内节点的数据传输。但是,此协议不适用于高数据率情况。文献[8]针对低功耗易损网络(Low Power and Lossy Network)路由协议(RPL),采用电晕机制应对移动环境。此协议重复使用相同的控制消息,降低了控制开销。但是此协议在M?WSNs的性能并不佳,很难满足M?WSNs中的服务质量(Quality of Service,QoS)。
为此,提出基于接触时间的区路由(Contact time?Area based Routing, CTAR)。CTAR协议先通过区概念降低能耗,即只有在区内的节点才能参与路由,而区外的节点进入休眠状态,进而降低节点能耗,同时,利用接触时间选择下一跳转发节点,提高了路由稳定性,最终提高了数据包传输率。仿真数据表明,提出的CTAR协议有效地提高了数据包传递率。
1 CTAR路由
1.1 系统模型
圆角矩形区域如图1所示。假定传感网络由M个移动节点构成,并随机分布于区域A内,基站的位置为[xb,yb]。第[i]个移动节点的速度为[?i],且[i=1,2,…,M]。此外,所有节点引用休眠?唤醒机制,降低能耗。假定每个节点休眠时间为[T],唤醒时间为[ΔT],且[ΔT<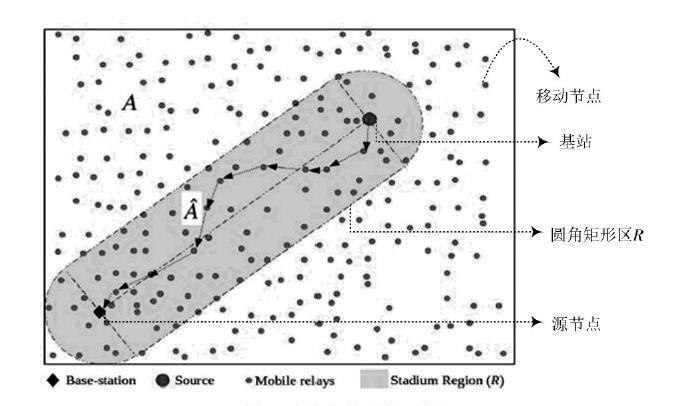
同时,假定源节点与基站间的通信区域为圆角矩形区域[R]。CTAR路由先建立圆角矩形区,并使得圆形区域内的节点保持唤醒状态,而区域外的节点进入休眠状态,从而降低网络能耗。然后,源节点从区域内中选择一个节点作为下一跳,即利用节点的相触时间(Contact Time,CT)选择下一跳节点,进而利用下一跳节点传输数据。CTAR路由区域构建和数据传输两个阶段构成。接下来,分析区域构建、数据传输两个阶段的过程。
1.2 区域构建
一旦节点有数据需要传输,它就进入区域构建阶段。区域构建的目的是形成源节点至目的节点的活动区域[10],且活动区域内的所有节点均保持活动节点。
具体而言,CTAR路由利用源节点和目的节点的位置信息构建连接源节点至目的节点间的区域。首先,源节点、目的节点以自己位置为圆心,以[r]为半径形成一个圆,再一切为半;然后,将采用长为[a]、宽为2[r]的矩形连通这两个半圆,因此,矩形区域的面积为[S]:
1.3 数据传输阶段
1.3.1 接触时间
仅区域[R]内的节点才参与数据传输阶段。若节点(源节点)有数据传输,它就从[R]内选择一个邻居节点作为下一跳转发节点。为此,它先向邻居节点广播数据请求包[datareq]。一旦邻居节点接收了[datareq],节点就启动定时器[T],其与接触时间[(CT)]成比,如下:
接触时间表示邻居节点停留在自己通信范围内的时间。具体而言,假定在[t0]时刻,两个移动节点[si]和[sj]在彼此通信范围内,而[Xit0],[Xjt0]分别表示节点[si],[sj]的位置矢量,其包含节点位置、速度,如图2所示。
图2 节点位置矢量示意图

1.3.2 下一跳节点的选择
当节点(源节点)有数据传输时,它就向邻居节点广播数据请求包[datareq],其包含了自己的位置信息、速度以及目的节点ID。一旦接收了[datareq],先判断自己是否为目的节点,若是目的节点,就直接回复确认包ACK。当源节点接收了ACK,就直接向此节点发送数据包。
若自己不是数据包的目的节点(自己将成为中间节点),就利用式(8)计算接触时间,并利用式(3)设置定时器。一旦定时结束,就直接回复ACK包。在等待定时器定时过程中,若监听到其他节点发送了ACK包,就取消定时器。当源节点接收了ACK包,它就向此节点发送数据包。这个过程如图3所示。
图3 中间节点接收数据包的示意图
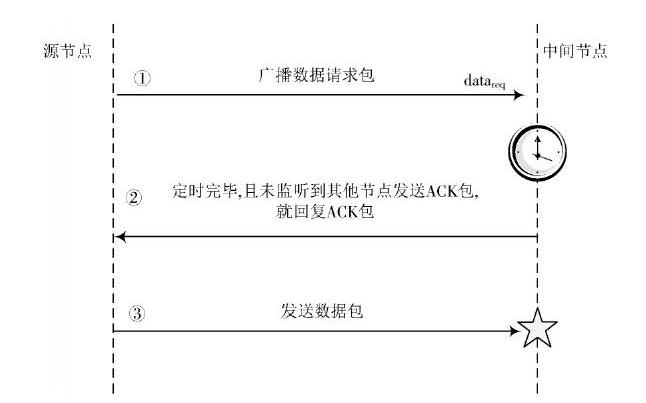
图4显示了产生下一跳节点的过程。从图4可知,源节点是将第一時间回复ACK包的节点作为下一跳转发节点,通过此策略,可以降低传输时延,提高数据包传输率。
2 数值仿真
2.1 仿真环境
为了更好地分析CTAR性能,选用Castalia软件建立平台。假定55个移动节点随机分布于[200 m×200 m]区域,且每个移动节点引用Random?waypoint移动模型进行移动,数据包尺寸为128 B。同时,选用基于接收器的机会转发协议(Receiver based Opportunistic Forwarding, ROF)[11]和贪婪边界转发路由(Greedy Perimeter Stateless Routing, GPSR)[12]。ROF协议并不需要建立源节点与目的节点间的全局路由。ROF协议依据竞争机制产生下一跳转发节点,而GPSR协议是依据实时邻居信息决策下一跳转发,并采用贪婪转发策略传输数据包。
图4 下一跳节点的选择过程

2.2 数值分析
首先分析数据包传递率随数据包发送率的变化情况,且移动速度为0.5 m/s,如图5所示。
图5 数据包传递率随发送率的变化曲线
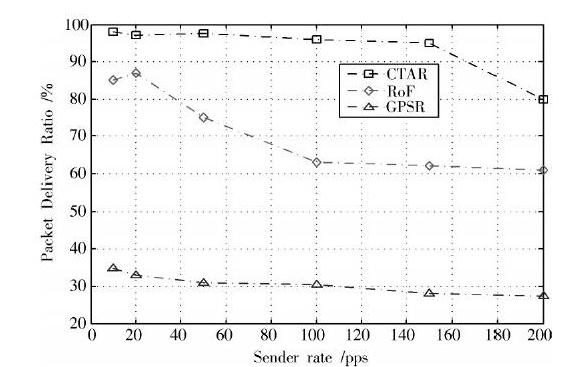
从图5可知,提出的CTAR协议的数据包传递率最高,优于RoF和GPSR协议,而GPSR协议的数据包传递率最低。这要归功于CTAR协议源节点和目的节点构建转发区域,并利用接触时间设置定时器,选择最优的下一跳转发节点。此外,数据包传递率随发送率的增加而呈降低趋势。原因在于:发送率越大,网络内传输的数据包数就越多,网络拥塞越严重,降低数据包传递率。
然后,分析移动速度对数据包传递率的影响,且移动速度从0.5~10 m/s变化,源节点发送数据包率为20 pps,如图6所示。
图6 数据包传递率随车速的变化情况

从图6可知,车速的增加降低了数据包传递率,原因在于:车速的增加,减少了接触时间,降低了链路的持续时间,最终降低了数据包传递成功率。与RoF和GPSR协议相比,提出的CTAR协议的数据包传递率得到有效提升。
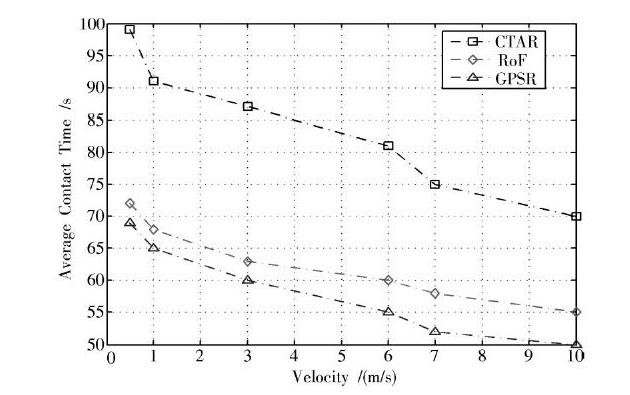
图7显示了平均接触时间数随车速变化情况,从图7可知,车速的增加降低了平均接触时间。这主要是因为:车速的提高,降低了链路连通时间。与RoF协议相比,提出的CTAR协议的平均接触时间得到很大的提高。例如,当车速为5 m/s,CTAR协议的平均接触时间为83 s,而RoF协议的平均接触时间为62 m/s。
图7 平均接触时间随车速变化情况
3 结 语
针对移动的传感网络,本文提出基于接触时间的区路由CTAR。CTAR路由引用唤醒?休眠机制,并采用区概念,降低节点能耗。同时,引用接触时间变量,并利用接触时间选择下一跳节点。仿真结果表明,提出的CTAR路由有效地提高了数据包传递率,并降低了平均接触时间。
参考文献
[1] 杨奎武,郭渊博,马骏,等.基于网络编码的延迟容忍移动传感器网络低时延广播传输机制[J].电子与信息学报,2012,34(5):1239?1245.
YANG Kuiwu, GUO Yuanbo, MA Jun, et al. A netcoding?based delay?sensitive broadcast transmission scheme for delay tolerant mobile sensor networks [J]. Journal of electronics & information technology, 2012, 34(5): 1239?1245.
[2] SILVA R, SILVA J S, BOAVIDA F. Mobility in wireless sensor networks: survey and proposal [J]. Computer communications, 2014, 52(6): 1?20.
[3] SARA G S, SRIDHARAN D. Routing in mobile wireless sensor network: a survey [J]. Telecommunication systems, 2014, 57(1): 51?79.
[4] BOUBEKRI A, AJIB W, BOUKADOUM M. EAM: energy aware mobility over wireless sensor networks [C]// Proceedings of the 30th IEEE Canadian Conference on Electrical and Computer Engineering. Windsor: IEEE, 2017: 1?6.
[5] 孙毅,孙跃,曾璐琨,等.基于最优连通功率控制的WSNs跨层路由优化算法[J].传感器与微系统,2014,33(11):135?138.
SUN Yi, SUN Yue, ZENG Lukun, et al. Cross?layer routing optimization algorithm for WSNs based on optimal connectivity power control [J]. Transducer and microsystem technologies, 2014, 33(11): 135?138.
[6] LUO J, HU J, WU D, et al. Opportunistic routing algorithm for relay node selection in wireless sensor networks [J]. IEEE transactions on industrial informatics, 2015, 11(1): 112?121.
[7] SARMA H K D, KAR A, MALL R. Energy efficient and reliable routing for mobile wireless sensor networks [C]// Proceedings of the 6th IEEE International Conference on Distributed Computing in Sensor Systems Workshops. Santa Barbara: IEEE, 2010: 1?6.
[8] GADDOUR O, KOUB?A A, RANGARAJAN R, et al. Co?RPL: RPL routing for mobile low power wireless sensor networks using corona mechanism [C]// Proceedings of the 9th IEEE International Symposium on Industrial Embedded Systems. Pisa: IEEE, 2014: 200?209.
[9] AMUNDSON I, KOUTSOUKOS X D. A survey on localization for mobile wireless sensor networks [C]// Proceedings of the 2nd International Conference on Mobile Entity Localization and Tracking in GPS?less Environments. Berlin: Springer, 2009: 235?254.
[10] SREEJITH V, SURVE R, VYAS N, et al. Area based routing protocol for mobile wireless sensor networks [C]// Proceedings of 2018 IEEE International Conference on Information Networking. Chiang Mai: IEEE, 2018: 781?789.
[11] LI L, SUN L, MA J, et al. A receiver?based opportunistic forwarding protocol for mobile sensor networks [C]// Proceedings of the 28th International Conference on Distributed Computing Systems Workshops. Beijing: IEEE, 2008: 198?203.
[12] KARP B, KUNG H T. GPSR: greedy perimeter stateless routing for wireless networks [C]// Proceedings of the 6th Annual International Conference on Mobile Computing and Networking. Boston: IEEE, 2000: 243?254.