小型无人机载SAR在SAR干扰系统试验中的应用
2019-06-15刘正堂程彦杰
刘正堂,程彦杰,周 文,薛 寒
(中国洛阳电子装备试验中心,河南 洛阳 471000)
0 引言
合成孔径雷达(SAR)是一种具有高分辨能力的微波成像雷达,在距离向利用脉冲压缩技术得到高分辨率,在方位向利用合成孔径技术得到高分辨率,从而得到目标的高分辨率图像[1]。与光学成像相比,SAR能够全天时全天候对地进行观测,不受黑夜、云雾等自然条件影响,而且在特定频率下能够穿透地表和植被获取地表下的信息,因而在地质探测、地形测绘等民用领域和目标识别、战场侦察等军事领域有着广泛的应用前景[2]。
无人机是利用无线电遥控设备或者机载程控系统进行操控的非载人飞行器。与有人驾驶飞机相比,无人机具有无人员伤亡风险、性价比高、机动性能好、生存能力强、造价低廉等特点[3]。SAR载荷与无人机相结合有利于无人机整体性能的发挥。SAR设备的主动探测特点弥补了光电载荷设备的不足,使无人机系统具备了全天候全天时的探测能力。SAR载荷的高分辨率、大探测范围的特点,使得无人机系统具有更高的工作效率,便于应用和降低成本[4]。SAR的远探测距离、侧向观测等特点,有利于无人机远离目标进行探测,避免危险、提高生存能力。
对合成孔径雷达干扰系统(简称SAR干扰系统)能灵活有效干扰星载SAR,降低其侦察监视和目标定位能力。由于缺少有效的配合目标和威胁环境,SAR干扰系统试验难以摆脱“缺对手、缺环境、难评估”的尴尬。组织SAR干扰系统试验时,通常采用大型飞机载特定频段SAR,构建星载SAR威胁环境。由于大型飞机对气象条件依赖强、飞行费用高、难以满足SAR干扰系统多批次高强度的试验需求。
本文提出了一种小型无人机载SAR用于SAR干扰系统试验的思路。针对小型无人机载SAR在测绘带宽、接收机动态范围、灵敏度等方面存在的问题,设计了一种无人机载SAR半实物仿真系统方案。该系统采用收发分置技术,利用无人机载SAR设备发射SAR信号,地面设备同步模拟SAR回波信号,利用射频接收系统接收SAR干扰信号,将干扰信号与模拟的回波信号进行链路合并,最后通过SAR成像处理,在PAD终端直观展示和评估对SAR的侦察和干扰效果。
1 SAR电子对抗试验运用模式分析
1.1 典型小型无人机载SAR系统
TUAVR战术型无人机载SAR系统是由诺格公司研制,专为美国陆Shadow200战术监视和目标截获无人机设计的SAR雷达[5]。TUAVR重量低于30kg、耗电小于500 W,发射机采用新型的微波功率模块,方位向扫描范围扩大到360°。TUAVR于1998年开始研制,2001年3月在无人机上试飞成功,同年装备部队。
在美国空军资助下,美国Sandia实验室于2005年成功研制了可装载小型战术型无人机平台的MiniSAR系统[6]。MiniSAR工作在Ku波段、工作在条带或聚束模式,最高分辨率为0.1 m、作用距离10 km~23 km、总重量低于12.2 kg。2006年10月,MiniSAR系统搭载在洛·马公司的小型“天空幽灵”(SkySpirit)战术无人机系统上成功进行了演示。
NanoSAR是美国ImSAR公司与Insitu公司合作研发的目前世界上最小的SAR[7],如图1所示。重为1磅(0.45 kg),几乎能为所有机载平台(包括无人机)提供全天候侦查和地理定位。以往SAR只能安装在大型、昂贵的无人机平台上,而小型的无人机侦察平台只能安装光学传感器和红外传感器,致使侦察平台无法在恶劣的天气条件下工作。NanoSAR的出现使小而轻便的无人机平台能在各种不利条件和可见度极低的情况下成像并跟踪移动目标。

图1 NanoSAR系列实物图
我国针对微小型无人机载SAR系统的研制起步时间较晚,于2010年左右才开始进行,但在以往丰富经验基础上进展迅速,并完成了实际系统研制,如中科院电子所、中电38所和北京理工大学等都研制出了微型SAR系统[8]。其中电子所D3160型SAR是一种采用连续脉冲新体制的微小型SAR系统,可工作在X或Ku频段,重量小于4 kg,探测距离达到10 km,分辨率优于0.3 m。D3160型SAR于2013年完成了研制,并加装在三角翼、无人机等飞行器上进行试验和测试。图2是D3160型SAR及加装在多旋翼无人机上的照片,包括雷达设备和天线两个单元。下页表1给出了上述典型小型无人载SAR的技术参数。

图2 D3160型无人机载SAR实物图
1.2 小型无人机载SAR运用分析
目前国内外主流的微型SAR在分辨率上均可以做到1 m以下,探测距离大于1 km,重量在5 kg左右,具备了装载小型无人机的条件。假设无人机载SAR工作在正侧视条带工作模式,干扰机在测绘带中心,忽略地球曲率的影响,则无人机载SAR和SAR干扰机的相对位置关系如下页图3所示。
图3中,H为无人机飞行高度,θ为SAR波束宽度,β为SAR最大俯视角,R0为无人机载SAR到SAR干扰机的距离,W为测绘带的宽度。由几何关系可知
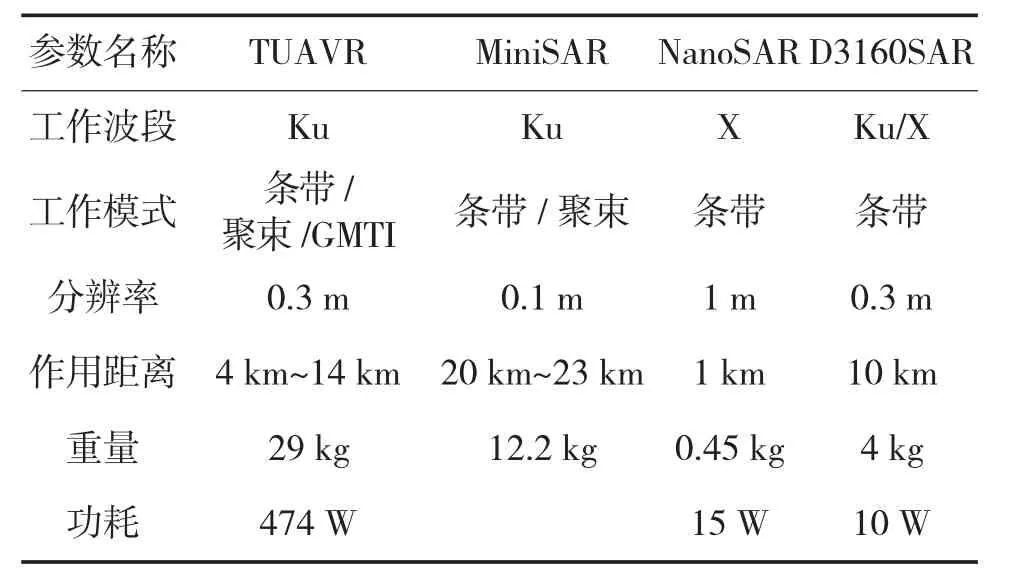
表1 典型小型无人机载SAR技术参数
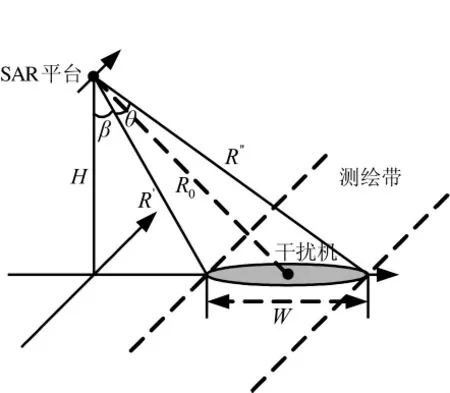
图3 无人机载SAR与干扰机位置关系示意图
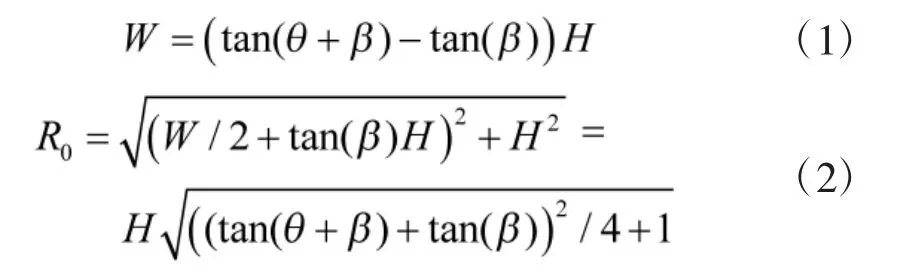
假设SAR在波束中心方向上天线增益为Gt,且收发共用一个天线,天线波束指向目标,SAR接收天线有效孔径为Ae为工作波长,则天线有效孔径与天线增益的关系为:

假定发射机功率为Pt,SAR干扰机的发射功率为Pj,在SAR天线波束中心方向上的夹角为φ,忽略各种损耗,可得SAR干扰设备侦察接收机和SAR接收机端的信号功率为:
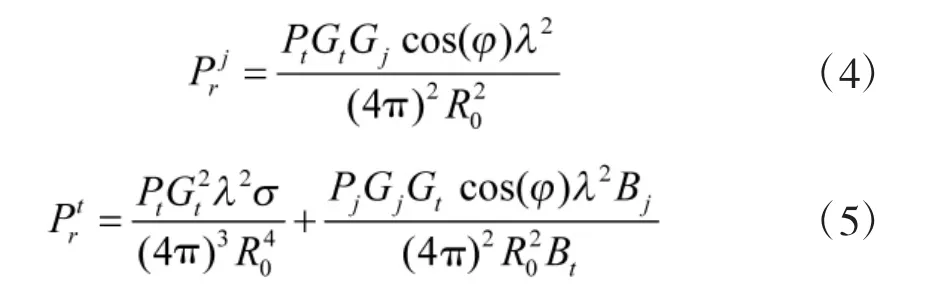
其中,Bj和Bt分为SAR干扰机与SAR接收机的工作带宽。上式中第1项为SAR回波信号,第2项为干扰信号,则SAR接收机输入端的信干比为:
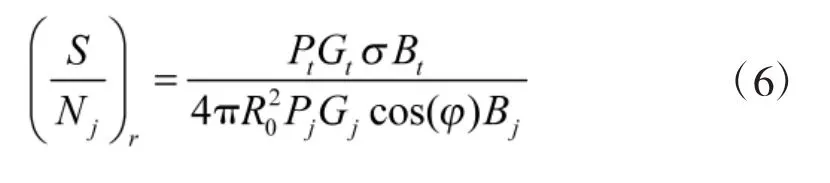
经过成像处理,目标回波获得了距离压缩和方位压缩的处理增益,成像后的信干比为:

其中,γγ和γa分别为距离向压缩增益和方位向压缩增益。SAR 的 γγγa一般约为 103~106量级[9],即处理增益约为30 dB~60 dB。
根据上述分析,选取典型无人机载SAR工作参数为:发射功率5W,工作带宽200M,工作频率18G,天线增益 5 dB,波束宽度 θ=30°,俯视角 β=30°;选取典型大功率SAR干扰装备的工作参数为:发射功率1 MW,工作带宽200 M,天线增益50 dB,无人机飞行高度1 km,通过上述各式计算可得:测绘带宽W=1.16 km,干扰机到SAR的距离R0=1.4 km,SAR干扰机侦察天线口面功率Pγj=-61.6 dBW,SAR接收机天线口面功率Pγt=-8.6 dBW,SAR接收机输入端信干比(S/Nj)γ=-178 dB。
由上述数据可以看出,无人机载SAR的测绘带宽为1.16 km,远远小于典型星载/机载SAR的测绘宽带,难以满足试验需求。干扰机到SAR的距离为2 km,SAR干扰机侦察天线口面的信号功率为-61.6 dB,大于典型SAR侦察接收机的灵敏度,可以检测到SAR信号。而SAR接收机端的信号功率为-8.6 dBW,远远超出了其接收机动态范围,可能会导致SAR接收机过载。此外,SAR接收机输入端的信干比为-178 dB,即使加上60 dB的处理增益,信干比仍达-120 dB左右。图4给出了MiniSAR成像的真实数据以及受不同程度干扰时的受扰结果。从图中可以看出,当SNR为-20 dB时,已无法识别图像信息。因此,当SNR为-120 dB时,SAR图像更无法识别。
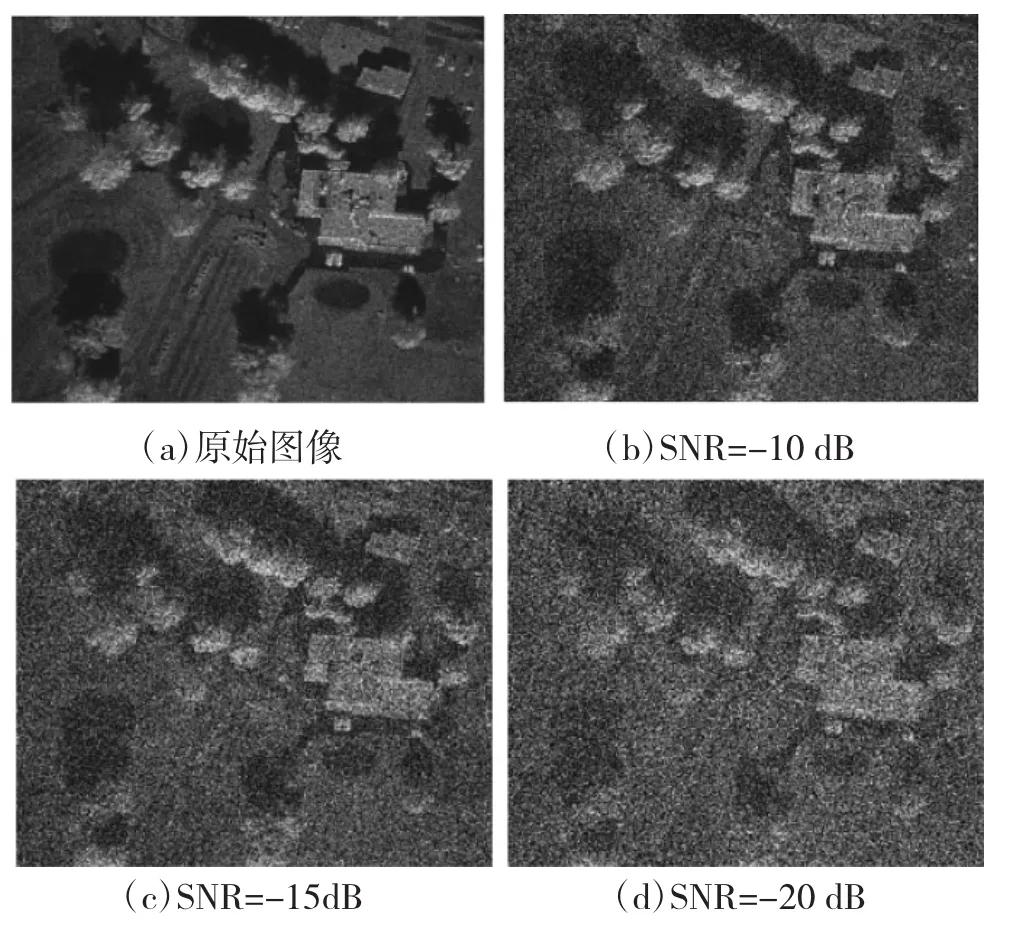
图4 MiniSAR图像受不同强度干扰结果
基于上述分析可见,小型无人机载SAR在测绘带宽度、接收机动态范围、接收信噪比等方面难以满足SAR干扰系统试验需求,故小型无人机载SAR无法直接用于SAR干扰系统试验。
2 无人机载SAR半实物仿真系统设计
2.1 无人机载SAR半实物仿真系统方案
由上节分析可知,无人机载SAR直接用于SAR干扰系统试验时,会面临测绘带过窄、干扰信号功率过大、信噪比过高的问题,难以满足实际试验需求。为解决这一问题,考虑一种采用收发分置技术的“无人机载SAR+地面SAR全链路模拟设备+射频接收机”的无人机载SAR半实物仿真系统方案。如图4所示,无人机载SAR只发射SAR信号,不进行回波接收;地面SAR全链路模拟设备同步进行回波信号模拟,射频接收机接收SAR干扰机的副瓣或背瓣信号,这样可大幅降低干扰信号功率,经下变频处理和ADC转换和功率衰减等处理,与回波模拟信号进行链路合并,然后进行SAR成像,最后通过PAD终端直观展示SAR受干扰效果。
2.2 系统组成与功能
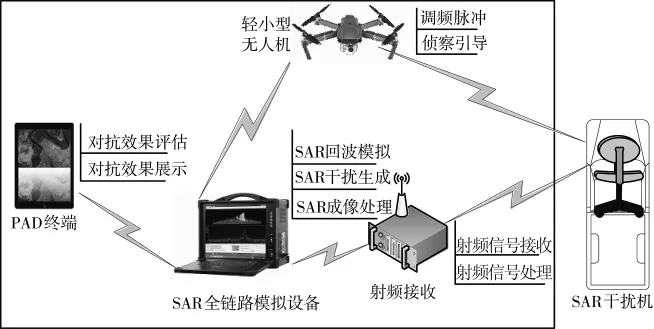
图5 无人机载SAR半实物仿真系统方案示意图
如图5所示,系统由无人机载SAR平台、仿真控制模块、射频接收模块、回波信号产生模块、干扰信号产生模块、成像处理模块、评估模块组成。其中,无人机载SAR模块负责发射固定频率的SAR信号,引导SAR侦察设备对SAR信号进行侦察;射频接收模块负责接收SAR干扰系统的干扰信号,并将干扰信号下变频处理后传送给干扰信号产生模块;仿真控制模块负责初始化无人机载SAR平台的发射参数,控制回波信号模拟模块和干扰信号产生模块生成相应的回波信号和干扰信号;回波信号产生模块负责模拟生成指定区域的SAR回波信号,为SAR干扰系统的干扰信号提供配合目标,为后续的成像处理提供原始数据;干扰信号产生模块是将下变频处理后的中频干扰信号进一步处理为基带信号,并考虑到系统的衰减和相位变化,将干扰信号按照特定的时序进行排列;成像处理模块将回波信号和干扰信号按照特定时序进行叠加,并进行SAR成像处理,得到受干扰后的SAR图像;效果评估模块分为SAR侦察评估和SAR干扰评估两个模块,分别根据相应指标对SAR干扰系统的侦察和干扰效果进行评估,并在相应的终端上进行展示。
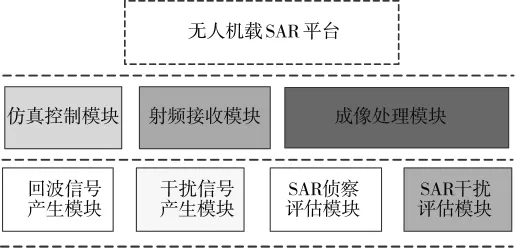
图6 无人机载SAR半实物仿真系统功能组成
2.3 系统工作过程
1)仿真控制模块对卫星轨道和发射信号等参数进行初始化设置,无人机载SAR平台升空,对SAR干扰系统所在区域发射固定频段的SAR信号,模拟侦察卫星对指定区域的成像侦察。
2)SAR干扰机侦察系统侦察到无人机载SAR平台发射的SAR信号后对信号进行侦察定位和分选识别,真实模拟对星载SAR发射信号的主瓣侦察、旁瓣侦察等SAR侦察过程。
3)SAR侦察系统将侦察结果传送给SAR干扰系统,SAR干扰系统根据侦察的SAR信号参数,选取合适的干扰样式对SAR进行压制式或欺骗式干扰。
4)射频接收模块接收SAR干扰系统的干扰信号,进行下变频处理,并将干扰信号传送给干扰信号产生模块,实现对干扰信号的无缝接收。
5)仿真控制模块根据无人机载SAR平台发射信号参数控制回波产生模块同步产生相应的回波信号,并控制干扰信号产生模块对干扰信号进行解析,按照时序和相位要求以及等效辐射功率产生相应的干扰信号。
6)成像处理模块根据干扰的时序和类型,对回波信号与干扰信号进行合路叠加,依据仿真控制模块模拟的星载SAR工作模式,选择对应的成像处理方法,对包含干扰信号的回波信号进行成像处理,根据回波信号和干扰信号进行SAR成像。
7)效果评估模块根据SAR成像处理结果,结合评估指标,分别对SAR侦察和SAR干扰的效果进行评估,结合二者评估结果对整个SAR对抗行动效果进行评估,并进行干扰效果展示。
3 SAR半实物仿真系统关键技术
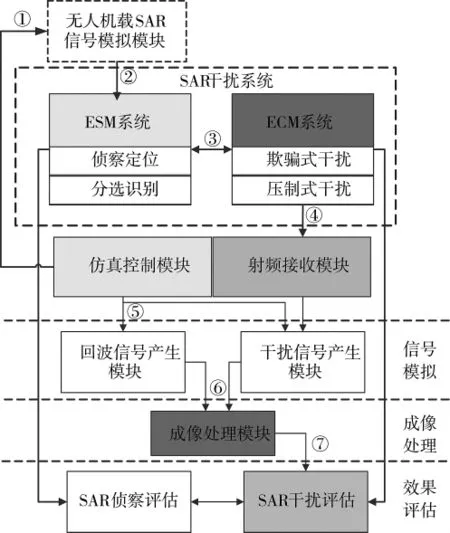
图7 SAR对抗试验半实物仿真系统工作过程
本系统涉及的关键技术包括SAR干扰信号仿真技术、高效高精SAR回波模拟技术、基于半实物链路的信号合成技术、SAR干扰效果评估技术4个方面。
3.1 SAR干扰信号仿真技术
SAR干扰信号产生需要与SAR干扰系统实现交联,要能够产生相应的干扰样式和干扰类型。此外根据回波模拟对象是机载还是星载,还需要根据距离将接收的干扰信号进行等效辐射功率变换[10]。如果考虑系统扩展能力,还需要支持对新体制的干扰样式的扩展功能。因此,多干扰样式和干扰参数的SAR干扰信号仿真技术是本系统的关键技术之一。
3.2 高效高精度SAR回波模拟技术
SAR回波信号模拟是开展SAR成像处理算法研究、雷达系统性能分析研究等工作的基础。由于星载SAR空间几何关系复杂,雷达系统参数较多,仿真过程复杂,计算量大,同时由于SAR回波信号模拟过程中对相位精度等要求较高,进行大场景回波信号模拟时,需要考虑高效的SAR回波算法和硬件支持方案,为此SAR回波信号仿真是本系统的关键技术之一。
3.3 基于半实物链路的信号合成技术
为提高半实物仿真链路干扰效果的可信度,仿真控制模块需要识别SAR干扰系统的干扰参数,控制干扰信号产生模块产生干扰信号。干扰信号产生模块产生的数字干扰信号不能直接与回波信号直接叠加,需要考虑由于SAR平台(机载/星载)与干扰系统的空间几何关系引起的能量衰减和相位延迟。另外,将半实物链路产生的干扰信号按照特定的时序和回波信号叠加,还需要考虑干扰系统的干扰样式和信号生成方法。因为基于半实物链路的信号合成技术也是本系统的关键技术之一。
3.4 SAR干扰效果评估技术
SAR侦察系统对SAR信号的截获、分选、识别过程的效果评估,需要考虑到无人机载SAR平台与常规的机载/星载SAR平台在距离和机动性上存在差异,因此,SAR信号的功率特性和空间特性与常规的SAR信号也不同,对无人机载SAR侦察和干扰效果的评估要考虑信号差异的因素。目前针对SAR侦察干扰评估的研究较少,尚未有成熟的指标体系,因此,对SAR侦察和干扰效果的评估是本系统的关键技术之一。
4 结论
本文针对SAR干扰系统试验问题,提出一种小型无人机载SAR系统用于SAR干扰系统试验的思路,分析了小型无人机载SAR直接用于SAR对抗试验时存在的问题,基于上述问题,设计了一种用于SAR干扰系统试验的无人机载SAR半实物仿真系统,给出了系统的功能组成和工作流程,阐述了系统的关键技术。本文研究成果可为SAR干扰系统试验及无人机载SAR半实物仿真系统建设提供理论借鉴和技术支撑。
