基于图像预处理的局部二值模式人脸识别方法
2019-06-11李旭辉
文/李旭辉
随着计算机网络的发展,人们通过互联网进行电子交易活动,自由进出各个地方。同时,为了保证信息安全,有些信息只有通过身份认证才可以访问。以钥匙和密码为代表的传统身份认证技术容易被忘记和破解,而以指纹识别和面部识别为主的生物特征认证技术,具有不易被窃取和破解的优点,受到了政府部门如海关和边境部门的重视。在面部识别方面,LBP算法对轻微光照和面部遮挡的敏感度比较低,并且LBP旋转不变算子可以减少人脸旋转对识别结果的影响。但也存在一些缺点:首先人脸的明暗程度和人脸移动会影响识别结果。其次,测试设备的性能好坏对识别结果也会有影响。基于以上缺陷,需要对人脸图像进行光线补偿、重定位、通过中值滤波的方式减少噪声,提高识别准确度。
1 人脸数据的采集
为保证测试结果的准确性,我们采集了40个人不同光照、表情和遮挡的照片各20张,这些照片即原始图像。原始图像需要进行预处理,其中包括光线补偿、人脸重定位和中值滤波处理。
2 人脸数据的预处理
2.1 模糊人脸的处理方法
采集人脸图像的时候,由于人脸移动的原因,会存在人脸模糊的现象。模糊人脸的处理可以借助视频和图像的打码技术,即在一个区域内,分别使用一个随机的像素值和其他区域的像素值来代替原来区域的像素值处理模糊人脸。
2.2 基于中值滤波处理方式减少图像的噪音

图1:特征值提取
识别设备的优劣程度是影响识别结果的重要因素之一,如果摄像头的成本较低,图像将会出现部分模糊,这些模糊的像素就是图像的噪音,借助视频和图像的回复技术即中止滤波处理的方式图像将会出现一定的噪音,该噪音所在的像素的灰度值与周围像素的灰度值有很大的差异。基于此,我们可以利用中值滤波的方法,将周围的奇数个像素值进行排序,选择中间的灰度值取代模糊像素的灰度值。
2.3 基于定位技术对人脸重定位
由于人脸所处的环境如背景还有头发会对影响识别结果,因此可以对人脸背后的背景进行去除处理,只保留脸的轮廓和面貌。
人脸存在平移和旋转造成了识别结果的误判,通过对原始图像的翻转、平移、旋转可以让人脸的眼睛保持水平,眼部距离统一,从而达到重定位的要求。
2.4 基于灰度化技术减少光照影响
测试图像可以选用RGB模式的图像,由于任何色系都可以用红色,绿色和蓝色混合而成,基于此,所选用的平面图像可以使用基于位置坐标的二维函数来进表示,即:

其中f(x,y)是(x,y)点的颜色值,而fred(x,y),fgreen(x,y),fblue(x,y)分别是红色,绿色和蓝色的分量值。
由于光照对彩色图像的识别结果具有影响,此外彩色图像会降低识别的效率,提高算法的时间复杂度,因此需要将彩色图像装转换成为灰度图像,即:
3 图像的特征值提取
3.1 特征值提取的基本思想
LBP算法的思想是在3*3的窗口内,以中心像素的灰度值为阈值,将周围像素的灰度值大小与中心像素的灰度值进行比较,周围像素的灰度值大于中心像素,则为1,否则为0。3*3领域内的8个点经过比较之后,将会产生一个二进制数。
图1表示的是特征值提取的过程,其中中心像素的灰度值为6,周围像素的灰度值分别是44,118,192,204,61,174,250,将周围像素的灰度值与阈值作比较,得到了一个二进制数01111100.
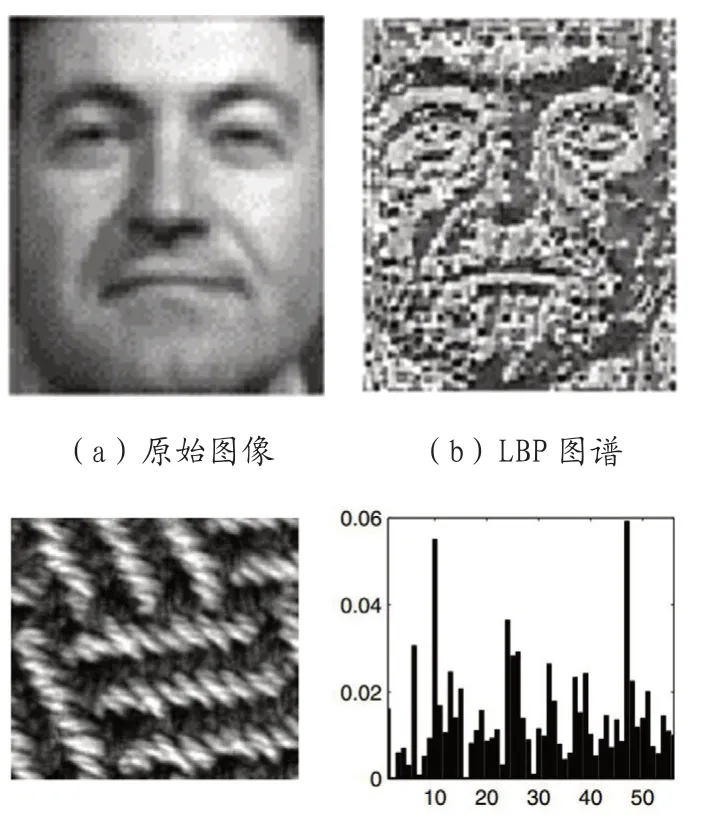
图3:特征值统计柱状图
3.2 特征值提取的算法改进
传统的特征值提取算法有两大缺陷。首先,传统算法的正方形邻域点的LBP值对人脸的姿态变化敏感度很大。其次,正方形邻域仅仅覆盖了半径之内的邻域点,无法满足不同尺寸和不同纹理的需要。Ojala对算法进行了一定的改进,首先将正方形邻域改变为圆形邻域,同时将3*3的邻域扩展到了任意的邻域,达到了旋转和灰度不变性的要求,从而扩大了邻域的范围,允许在圆形区域内有任意多的像素点。
为方便介绍改进的算法,首先定义一个参数s, 表示将中心像素的灰度值与周围像素的灰度值做对比,如果周围像素的灰度值大于中心像素,s为1,否则s为0,得到一个二进制数,可以表示成为公式(1)

对像素按照不同的位置进行加权,赋予2P的当量值,从而得到与邻域点相关的唯一LBP值:

其中p表示周围像素的个数,而gp和gc分别表示周围像素的灰度值和中心像素的灰度值。
借助改进的特征值提取算法,可以从原始的图像中得到经过提取后的纹理图,如图2所示。
4 图像特征化
4.1 特征值统计
将图像分为若干小区域,在每一个小区域内进行直方图统计,再将直方图连接在一起,特征值的统计柱状图,如图3所示。
4.2 图像的相似度度量
用训练图像和测试图像的直方图的的距离来作为图像的相似度度量,项目采用的是距离度量是欧式距离,借助chi平方概率统计方法,可以有效地计算出相似度,最终得到平均值,即识别的准确率,实验表明,相比较直方图相交距离和对数似然统计法,chi平方概率统计法效果最好。图4显示图像的相似度和距离。
5 LBP算法改进
5.1 LBP旋转不变模式
原始的LBP算子可以达到灰度不变的要求,但是无法达到旋转不变的要求。由于周围的像素点围绕中心像素点进行旋转的过程中,LBP值会随之发生变化,通过旋转周围像素点,取得一系列的LBP值,取最小的值作为LBP值,公式如下:

5.2 LBP等价模式
随着领域点的个数增加,LBP值将会产生爆炸性的增长,这对数据的存取不利,会增加识别的时间,由于在实际图像中,LBP最多会发生两次0到1或1到0的跳变,通过对LBP的模式种类进行降维,检验是否等价的公式定义如下:

通过等价模式的改进,二进制种类将会减少并且不会丢失信息,达到了低时间复杂度和低空间复杂度的要求,有效地减少了识别时间。
6 人脸识别
6.1 最邻近分类器的建立

图4:图像相似度和距离
将被测试的图像归入被训练的图像所在的类,其中该测试的图像与被训练的图像之间的欧式距离是最小的,该分类器是局部二值模式的分类器。
6.2 LBP在面部识别中的不足与改进
虽然LBP算法对光照、移动和遮挡的敏感度较低,在人脸较少的前提下识别时间比较短。但是当人脸的数目变多时,计算多幅测试图像和训练图像的LBP值的欧式距离将耗费大量的时间成本。其次,LBP算法识别人脸对面部表情变化的鲁棒性较低,尽管LBP旋转不变模式可以有效地在人脸移动的过程中比较准确地识别出人脸,但是选转不变模式局限于人脸轮廓地移动,而当人脸的表情发生变化的时候,像素也会从一块区域移动到邻近的区域,导致识别效率的大大降低。通过图片的中值滤波处理和重定位,可以有效减少以上缺点对识别准确度的影响。

表1
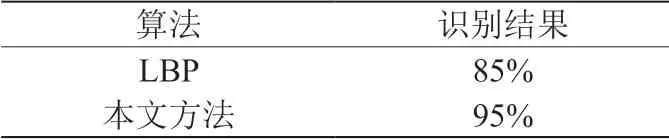
表2
(5)分别降维到不同的维数下得到识别的准确率,做出归纳分析,实验结果如表1所示。
由表2可知,经预处理之后的图片经LBP算法识别准确率有很大的提高。
7 结语
6.3 LBP图像的降维处理
经过LBP化处理的图像的维数是86*56,虽然相比原始图像,LBP化处理后的图像的维数减少了,但是图像的处理还是较为困难。此外,由于人的面部是非线性的,像素值之间也存在互相影响。所以利用主成分分析法(PCA)将多个图像特征向量降维成为互不干扰的向量。
PCA算法的原理简述如下,图像一共有86*56个像素,利用2*86*56的矩阵A进行表示。将训练图像进行归一化,这里用图像矩阵的每一行减去对应的均值。求出特训练图像的协方差矩阵和特征值:
本文通过对图片进行预处理后利用LBP特征算法识别图像,有效提高识别的准确度,弥补了LBP算法在噪声和人脸移动方面的不足。

将图像矩阵进行降维处理,取得最大的特征值对应的特征向量。
6.4 实验结果
为保证实验结果的真实性,实验所用的人脸库来自现场采集,总共包括40个人,每个人有20张不同表情、遮挡和光照的图片,原始图片的大小为565*256像素,经过预处理和特征值提取后的图像大小为86*56像素。识别分为以下六个步骤:
(1)采集人脸图像。
(2)人脸图像预处理。
(3)进行图片的特征值提取。
(4)对经过提取的图像进行降维处理。
