基于无人机的天线方向图测试实现方法
2019-06-03刘有才张冬晓
刘有才,张冬晓
(1.中国电子科技集团公司第五十四研究所遥控遥测专业部,石家庄 050003;2.军械工程学院电磁环境效应重点实验室,石家庄 050003)
1 引言
天线是日常生产生活中常见的辐射和接收装置,其工作频率越低,天线的尺寸则相对较大。一般根据天线指标要求进行结构和尺寸设计,为验证天线产品特征参数,需要开展实际测试与校准。GJB 8815等国军标中对于天线方向图等参数的测试和校准做出了具体的规范和要求,理想的测试场地为电波暗室,但该场地一般只适合用于高频天线测试,且要求被测天线使用场景灵活。对于低频天线,例如广播电视塔天线,其尺寸和占地面积较大,无法开展天线的实验室测试活动,只能在开阔场测试天线的方向图,同样由于尺寸问题面临巨大的测试难题。
随着电子信息技术的快速发展,无人机逐渐走进大众视野,由于其轻便、低成本、飞行灵活等特点,广泛应用于社会生产和生活,包括航拍、气象观测、农业植保、电力巡线等,受到各行业的广泛关注。因此,将无人机应用于天线测试是解决当前低频天线特征参数测量与验证的新思路与新课题。近年来,国际上在开展用于天文观测活动的分布式天线阵建设过程中引入了无人机测量技术,研究人员在对阵元和子阵列开展方向图测量验证过程中,由于天线尺寸大,覆盖地域广,且地面会对天线测量产生影响,因此尝试利用新兴的无人机技术对天线实际方向图进行测试,验证仿真设计指标,取得了一定效果[1-6]。本文主要介绍了基于无人机的天线方向图测量和验证方法,分析影响该测试方法准确度的外界因素,并给出了当前的研究成果。
2 无人机远场源系统构成
无人机是一种采用遥控或者程控方式飞行的航空器,主要由飞控系统、数据链系统、动力系统、传感器系统等部分组成,一般分为固定翼和旋翼两种类型[7-9]。无人机搭载射频信号发生系统作为飞行载荷,开展天线原位测量,如图1所示。

图1 飞行远场源
相较于固定翼无人机,旋翼无人机飞行灵活、操纵性更强,因此一般采用旋翼无人机作为飞行测试平台。以图1(a)六旋翼无人机平台为例,平台内置GPS导航模块,采用多星空间距离后方交会的方法测量得到无人机所处空间位置。此外,平台内部惯性测量单元能够测得无人机的姿态角,包括方位角、俯仰角和滚转角,保持稳定的飞行姿态。通常情况下,无人机采用锂电池供电,续航时间能够达到15min,满足常规天线的测试要求。射频信号发生系统作为无人机载荷,要求该系统尺寸匀称、重量轻质,满足无人机载重限制和平稳飞行条件。信号发生器及电池置于无人机机身底部,采用轻薄金属包裹,作为天线的部分地平面,输出信号通过同轴电缆连接偶极子天线,利用平衡转换器抑制同轴线外皮的高频电流。
被试天线(阵)由于尺寸较大,且容易受到周围环境影响,适宜采用原位测量方式,根据天线互易性定理,利用被试天线接收无人机远场源发射的射频信号,由于远场测试要求和信号发生系统轻质需要,无人机飞行较远且信号源功率受限,因此接收信号微弱;此外,为了减小测试活动对天线方向图造成的影响,需要利用长电缆连接被试天线和接收机,信号经过电缆的额外衰减后进一步减小,利用低噪声放大器补偿电缆损耗,能够有效降低接收机灵敏度要求。
3 飞行测试方法
无人机搭载远场源,通过采用不同的飞行策略,能够测量得到不同的天线方向图[10]。一般情况下,无人机沿着被试天线辐射方向图的E面或者H面以固定高度近似直线航向水平飞行,如图2所示。
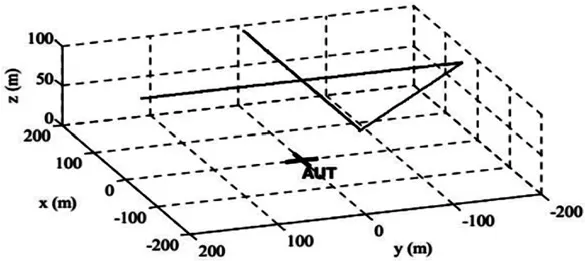
图2 无人机水平飞行路线
由于信号源的偶极子天线是线性极化,因此能够测试得到被试天线在某频点的共极化或者交叉极化方向图。但是该飞行策略存在一定缺点,首先,随着被试天线到无人机方向观察角度的增大,无人机飞离天线的距离也逐渐变大,导致空间路径损耗增加,该变化范围直接影响地面接收机的动态范围;其次,为了达到大观察角度下方向图测试目的,无人机飞离天线的距离越远,要求飞行器的续航时间也越长,而且只能得到天线的一维方向图。
因此,可以采用更为复杂的飞行策略,如图3所示,将一维方向图测试拓展到二维方向图测试。
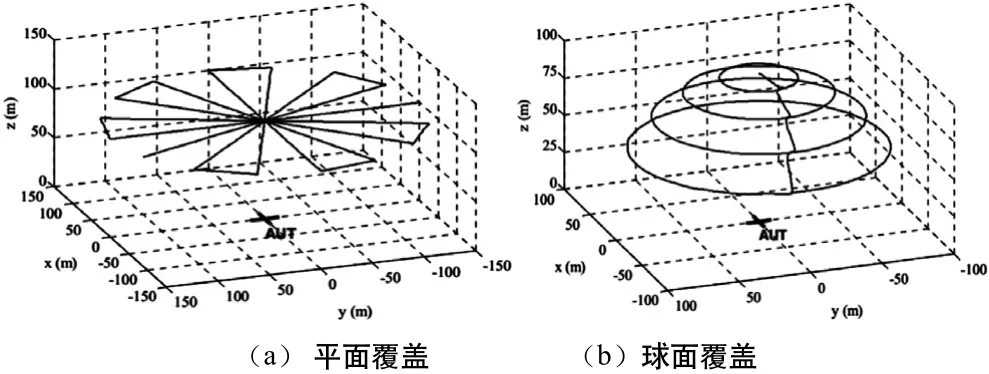
图3 无人机复杂飞行路线
图3中,无人机在水平面或者球面飞行测试,能够得到被测天线关于俯仰角θ和方位角φ的天线方向图。其中,图3(a)中的飞行路线由多条不同偏航角度的直线组成,且都位于相同高度的平面内,其覆盖面积大,采样密度密度随着飞离被试天线而减小。图3(b)中,无人机飞行路线由几条同心圆组成,且每条包线位于相同高度的平面内,采样密度更均匀,每条包线距离被试天线的距离相同,因此该飞行测试过程中,信号的路径损耗大小一致。该飞行路线要求无人机的偏航角与飞行速度矢量垂直,且被试天线的偏航角在同一包线内连续变化。无人机飞行过程中,其飞行位置实时变化,由于空间损耗,在无人机俯仰角和滚转角保持稳定的情况下,被测天线接收的相同极化方向下的信号功率也发生改变,将该信号大小与对应时刻和位置标记,得到整个飞行包线内的测量参数。由于远场源发射功率恒定,根据空间损耗和接收信号大小,能够计算得出天线同向极化的方向图。
4 方向图求解
被试天线将远场源辐射场转化为传导信号,经过低噪声放大器放大后到达接收机,接收功率与远场源发射功率、发射天线增益、路径损耗等因素有关,即[11-12]:P(1)
式中,gAUT是被试天线的增益;单位矢量表示被试天线球面参考系统的观察方向;M表示极化失配因子;Pr是测试得到的输出功率;是从被试天线到无人机的距离矢量;gs和Ps分别是远场源的辐射方向性系数和发射功率;GR表示低噪放和线缆损耗总的增益;无人机的姿态角度α、β、γ分别表示航向角、俯仰角和滚转角。上式中极化失配因子是远场源和被试天线极化矢量分量的函数,即(2)
式中,上标co和x分别代表共极化和交叉极化分量。由于测试源的对称性,对于E面方向图测试来说,水平面的交叉极化分量接近于0,所以当航向角为0°时,,此时式
将接收功率减去远场源的发射功率、发射天线增益和仿真得到的发射天线方向性系数、路径损耗得到被测天线的共极化方向图。
5 天线测量应用及典型影响因素分析
作为天文观测用天线阵的一部分,SAD天线阵子项目是由意大利负责设计和研制,以Vivaldi阵元为测试对象,其宽度和高度尺寸约为1.5m,如图4所示。

图4 Vivaldi阵元天线
为达到远场测量目的,无人机飞离地面高度需要控制在70m上,测试得到天线在350MHz工作频点的E面方向图,并对比验证了测试与仿真一致性以及导航精度和姿态角对测试结果的影响,结果如图5所示。
图5中给出三种实际测试得到的E面方向图数据,与仿真结果对比发现,采用高精度PPK-GNSS导航定位并考虑姿态角对测试精度的影响条件下,得到的测试结果与仿真结果一致性较好,误差在1dB以内;若将高精度导航替换成普通的机载GPS导航系统,由于定位误差减低一个数量级,测试结果偏差较大;若只采用高精度导航而忽略航向角偏差带来的测试误差,实际测试得到的方向图对称性较差,主要原因是无人机实际飞行过程中航向角会在一定角度范围内漂移,此外外界自然风可能会导致飞行姿态随机变化幅度变大,导致测试结果恶化。因此,开展原位天线方向图测试应该尽量选择低风速天气条件,要求无人机搭载高精度导航定位装置,并考虑飞行姿态角带来的误差。
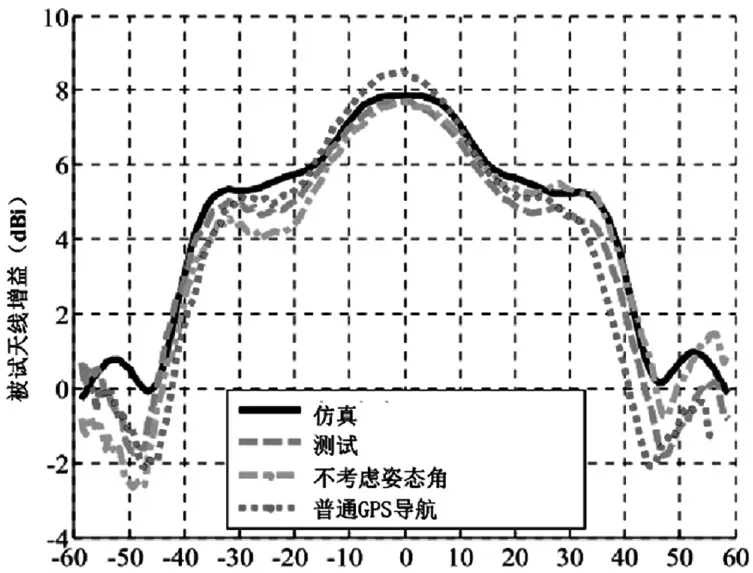
图5 仿真测试结果对比
6 结束语
为了满足天线远场测试要求,将无人机作为飞行平台,搭载射频信号发生系统,飞离天线,按照预定航线飞行,测量被试天线的接收功率,根据弗里斯公式能够分离出天线方向图函数。随着高精度传感技术、人工智能和电池行业的持续发展,无人机飞行稳定性、精确性以及续航能力的提高必将推动天线原位测试技术向着成熟化和专业化方向发展,破解当前分布式大面积天线阵测试难题,为航天发展和深空探测助力。
