水田自走式喷雾机喷杆自动调平系统设计与试验
2019-05-27可欣荣唐灵茂蒙世博
张 盟,胡 炼,可欣荣,唐灵茂,蒙世博,杜 攀,周 浩,贺 静
(华南农业大学 a.南方农业机械与装备关键技术教育部重点实验室;b.工程学院,广州 510642)
0 引言
水稻是我国重要的粮食作物之一[1],稻谷总产量约占谷物总产量的36%。病虫草害是影响水稻稳产和高产的重要因素,由于化学农药具有高效、快速等特点,迄今为止,化学药物防治仍是病虫草害的最主要和最有效的防治手段[2-4]。近年来,水稻喷雾机械从传统的背负式喷雾机快速发展到水田自走式喷雾机及航空植保机械,喷施作业效率及效果显著[5]。由于水田的硬底层高低不一,喷雾作业时喷雾机与喷杆容易产生倾斜,导致喷杆难以保持水平状态,影响喷雾分布均匀性[6-7]。Speelman等[8]研究了喷杆在水平与垂直方向上的振动对喷雾量分布均匀性的影响,试验结果表明,振动频率对喷雾量分布均匀性有显著影响;Ooms等[9]通过田间试验研究表明,喷杆的水平运动是影响喷雾量横向分布均匀性的主要因素;Sin.fort等[10]采用红外发射器检测喷杆的姿态;Pochi等[11-12]设计了一套电位器式喷杆姿态检测系统;Ooms等[13]采用多传感器的组合实现喷杆姿态检测;王佳文等[14]利用弹簧和阻尼器完成喷杆机械调平工作;魏新华等[15]设计了一套基于超声波传感器的喷杆式喷雾机喷杆高度及平衡自动控制系统,旱田试验结果表明,在地面有起伏时,喷杆能够快速恢复平衡。由于在水稻田中水面、泥面和冠层可认为近似水平,因此喷杆水平姿态控制可仅依靠喷雾机姿态角变化来决策。为实现喷杆自动调平控制,本文设计了喷雾机车身倾角传感器和喷杆自动调平控制系统,开展了测试试验研究,并对试验结果进行了分析。
1 喷杆自动调平机械结构设计
水田自走式喷雾机喷杆调平机械,包括高程调节结构、喷杆调平机构和喷杆3个部分,如图1所示。高程调节机构包括平行四杆机构和电动推杆A,调节电动推杆A的伸长量即可调节喷杆高程;喷杆调平机构通过平行四杆机构与喷雾机连接,喷杆调平机构包括喷杆转动架、电机安装板、电动推杆B、位移传感器安装架及喷杆支架等;喷杆左右两侧的电动推杆用于控制喷杆的折叠;电动推杆B采用倾斜安装的方式,当电动推杆B伸出其行程的1/2时,喷杆平行于喷杆转动架。调节电动推杆B驱动喷杆绕转动机构转动,从而调节喷杆与喷雾机车身之间的相对角度,转动机构与喷雾机之间的连接为刚性连接,拉线式位移传感器用于检测电动推杆B的伸长量。
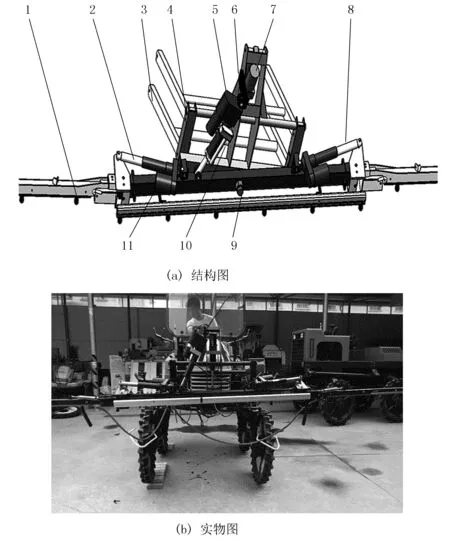
1.喷杆 2.电动推杆L 3.平行四杆 4.喷杆转动架 5.电动推杆B
2 喷雾机车身倾角传感器设计
2.1 测量原理
车身倾角传感器主要由MEMS惯性传感器[16-17]组成,包括陀螺仪(X轴、Z轴)和加速度计,如图2所示。
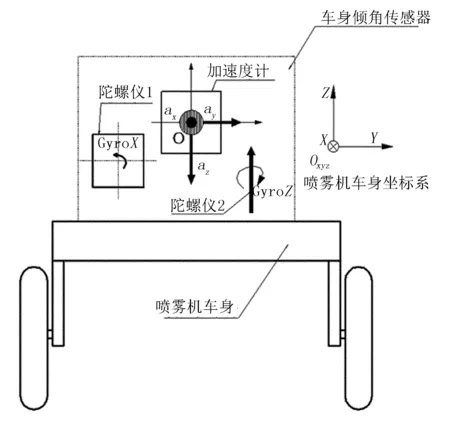
图2 车身倾角传感器安装位置简化图
其功能分别为:陀螺仪1实时测量喷雾机横滚轴的角速度;陀螺仪2实时测量喷雾机航向轴的角速度;加速度计实时测量喷雾机车身坐标轴上的加速度。在安装车身倾角传感器时,喷雾机车身坐标OXYZ与加速度计的坐标Oaxayaz重合,陀螺仪1和陀螺仪2的安装轴分别与喷雾机车身坐标OXYZ坐标的X轴、Z轴重合。
2.2 电路总体方案设计
车身倾角传感器的硬件主要包括三大部分,分别是数据采集部分、运算处理部分和数据通讯部分。运算部分处理器采用TI生产的C2000系列32位DSP处理器TMS320F28069,时钟频率90MHz,可进行32位带浮点运算,外设资源丰富,具有SPI、I2C、ADC、RS232和CAN等数据采集和通讯功能,各项指标均能满足使用要求。数据采集部分主要用于采集陀螺仪、加速度计和拉线传感器数据。其中,X轴和Z轴陀螺仪分别选用美国ADI公司生产的ADXRS453和ADXRS810型陀螺仪(角速度传感器);加速度计选用美国ADI公司生产的ADXL355型惯性测量模块,可进行3轴MEMS加速度测量,单位可选,包括±2、±4、±8g;拉线传感器选用选用台州市椒江西域电子生产的型号为WXY15M-400-R型拉线式位移传感器,测量行程400mm,分辨率理论无线小,拉线速度最大为600mm/s。处理器TMS320F28069通过SPI接口采集ADXRS453、ADXL355、ADXRS810数据后,对原始数据进行低通滤波处理卡尔曼滤波算法运算,计算得到喷雾机车身倾斜角度;拉线式位移传感器经由处理器内置的A/D转换器采集并转化为数字信号,最后与倾角信号由CAN总线方式传送至控制器。车身倾角传感器框图如图3所示。
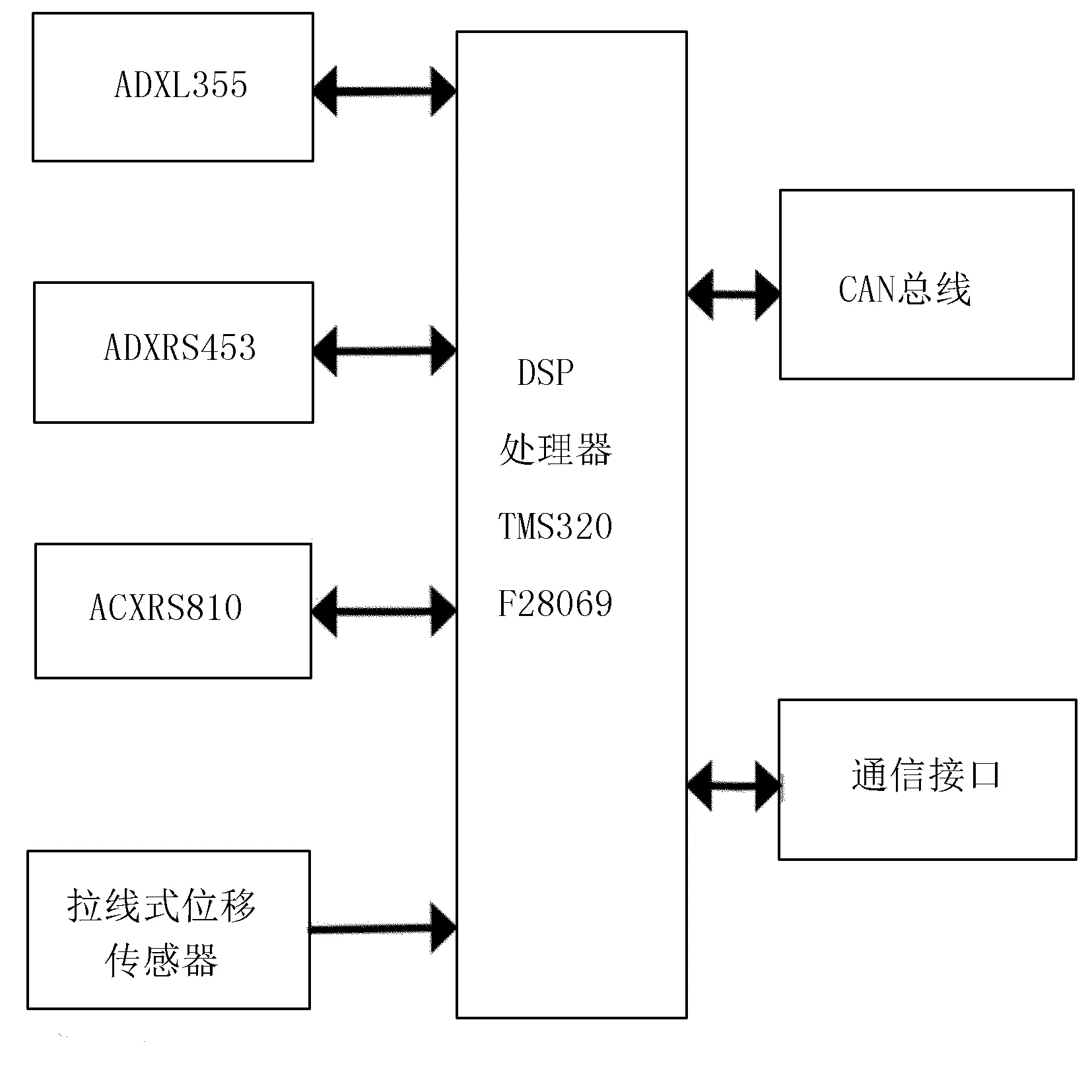
图3 车身倾角传感器总体设计图
2.3 卡尔曼滤波器设计
卡尔曼滤波简称KF(Kalman Filtering),是一种递推的线性最小方差估计滤波方法[18]。它是利用前一个时刻的估计值,加上实时观测的量测值来进行实时估计,适用于平稳过程和非平稳过程。
喷雾机行驶过程中,卡尔曼滤波融合加速度计和陀螺仪的方法过程为
(1)
(2)
(3)
(4)
ZK=sin-1(ag,y,k/g)+wa,k
(5)
(6)

2.4 软件设计
车身倾角传感器软件设计主要在CCS6.1.1(Code Composer Studio)集成编译软件中完成。其主要功能为:设备初始化、传感器数据的采集与处理,以及卡尔曼滤波运算和通信等。设备初始化包括处理器外围设备引脚设置和I/O口设置的初始化,主要包括时钟定时器模块初始化、SCI模块初始化、ADC模块初始化、eCAN模块初始化及SPI模块初始化。
车身倾角传感器的运行流程如图4所示。当处理器完成初始化之后,程序自动对MEMS传感器进行检测,传感器检测正常则开启时钟中断,反之结束。定时器中断服务中,依次进行MEMS传感器数据采集、初步处理、卡尔曼滤波算法运算和数据发送。
3 喷杆自动调平控制系统
3.1 喷杆自动调平控制系统结构
喷杆自动调平控制系统如图5所示。采用三轴加速度和两个陀螺仪数据,通过卡尔曼滤波算法得到喷雾机车身实时横向倾角,利用拉线式位移传感器实时测量调平电动推杆的伸长量,通过计算获得喷杆相对于喷雾机车身的角度,经由控制器运算并输出控制信号,实现喷杆的自动调平控制。
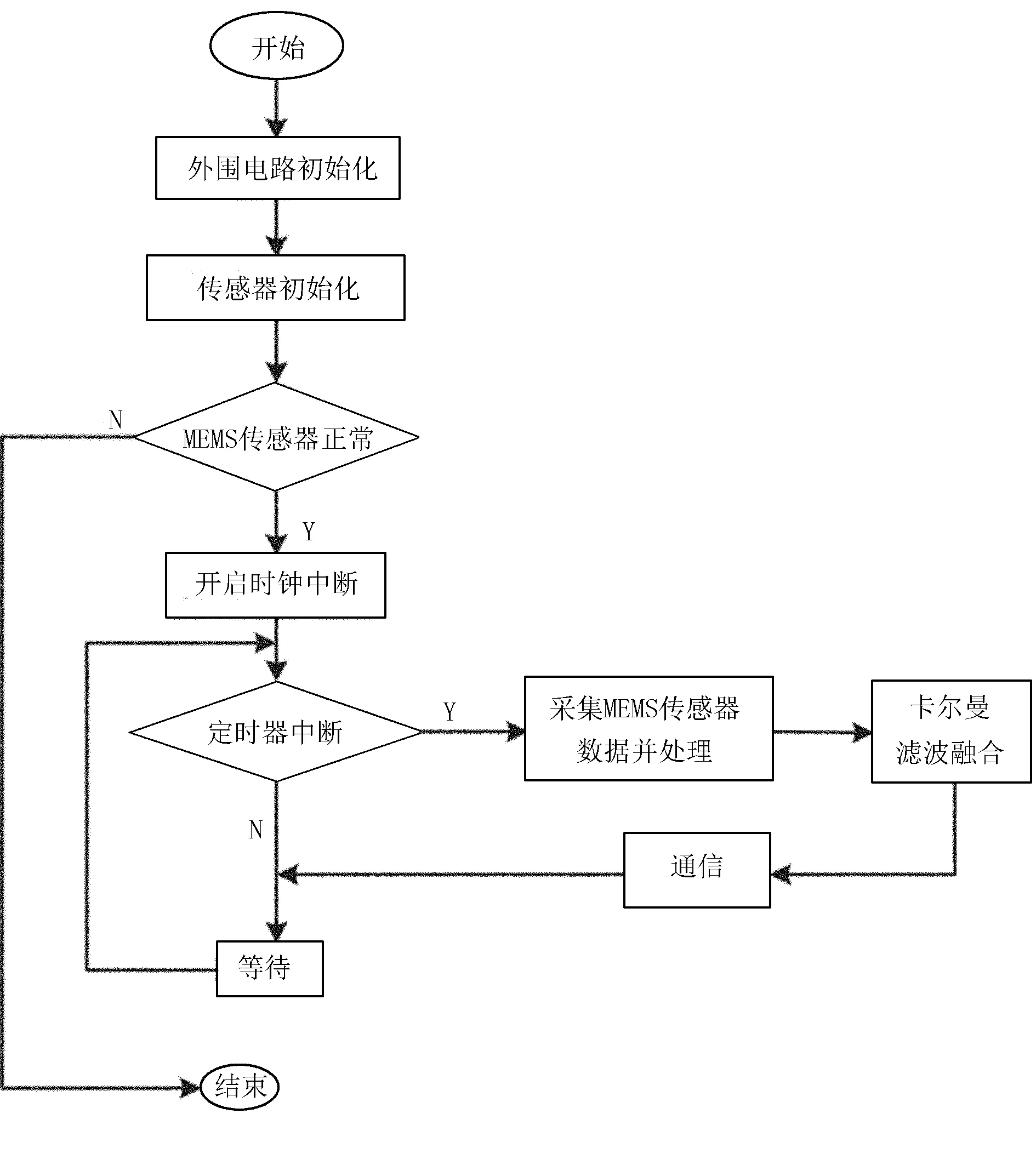
图4 倾角传感器系统流程图
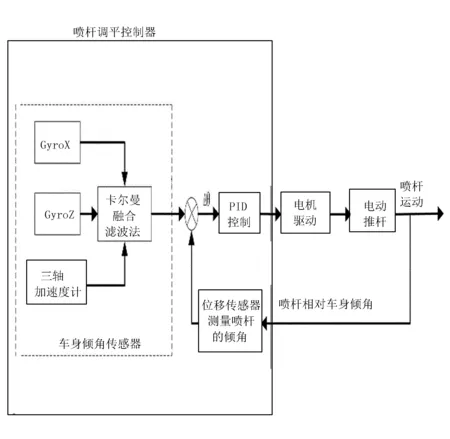
图5 喷杆自动调平控制系统简化结构图
喷杆与喷雾机相对运动可简化如图6所示。其中,喷杆与转动铰接点的位置与喷杆的坐标中心Oh重合,喷雾机的前进方向与XtOtYtZt坐标系Xt正方向平行。喷杆相对于喷雾机的倾斜角θ与电动推杆的伸长量α的关系为
(7)
其中,α和β分别为喷杆铰接处的两个固定角度(°);Lb和Lc分别为电动推杆两端与喷杆转动机构铰接点之间的距离(mm);La为电动推杆伸缩至最短时的长度(mm);a为电动推杆的伸长量(mm)。
喷杆调平控制采用增量式PID控制算法[19-20],当前时刻应控制的喷杆目标角度和喷杆相对喷雾机车身倾角调节量分别为控制量和增量。

图6 喷杆自动调平系统简化结构图
图6中,Oh为喷杆坐标中心且是喷杆与转动机构的铰接点;Ot为喷雾机车身坐标中心;yt为喷雾机车身坐标系y轴;zt为喷雾机车身坐标系z轴;ca为电动推杆顶端与喷雾机车身的铰接点;cb为电动推杆底端与喷杆的铰接点;cc为cb在喷杆上的投影点;θ为喷杆相对于喷雾机车身的倾斜角度,(°);α为夹角cbOhcc,(°);β为夹角caOhOt(°);La为电动推杆的最短长度(mm);a为电动推杆的位移伸长量(mm);Lb为caOh的长度(mm);Lc为cbOh的长度(mm)。
3.2 喷杆自动调平控制系统程序流程
田间作业过程中,车身倾角传感器安装在喷雾机车身上并实时检测喷雾机的倾斜角度,拉线式位移传感器安装在电动推杆上并实时测量电动推杆的伸缩量,结合喷雾机与喷杆的几何关系求得相对角度,实现喷杆自动调节的自动闭环控制。工作流程图如图7所示。
喷杆自动调平控制系统子程序流程如下:
1)系统初始化;
2)测量喷雾机车身倾斜角度以及喷杆相对于车身的相对角度;
3)判断是否对喷杆进行水平控制;
4)当需要对喷杆进行水平控制时,输出驱动信号调节喷杆倾斜角度;反之,则返回重新测量角度信息。
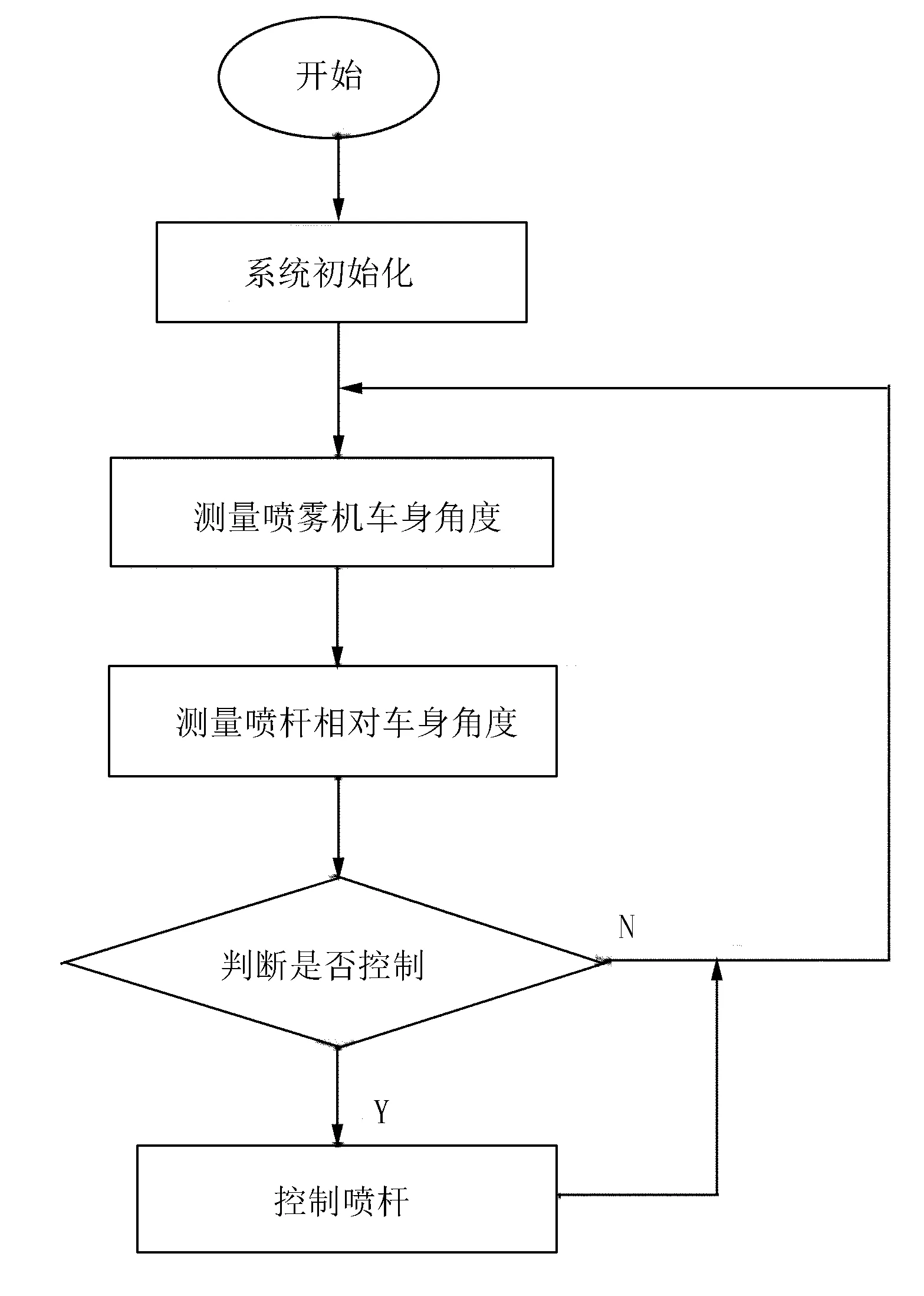
图7 喷杆自动调平系统工作流程图
4 试验与分析
水田高地隙宽幅喷雾机喷杆自动调平控制系统的理想状态是:不论在任何田间状况下,喷杆自动调平控制系统都可以依据车身倾角传感器、拉线式位移传感器检测喷杆与车身的相对位置,控制喷杆的水平姿态保持在一定的角度范围内。在实际田间喷雾作业过程中,喷雾机车身往往会有不同程度的倾斜,因此研究喷杆自动调平控制系统在喷雾机车身倾斜时的调平效果和田间实际作业效果具有重要的参考意义。
4.1 喷杆自动调平控制试验
4.1.1 试验材料
试验材料包括喷雾机1台、AHRS姿态参考系统、2台叉车(诺力叉车,型号AC30)、计算机、车身倾角传感器、秒表、控制器、串口调试助手软件和MatLab R2014a软件等。喷雾机选用东风井关农业机械有限公司生产的JKB18C水田自走式喷雾机,最小离地间隙为850mm,喷幅11.5m。AHRS姿态参考系统由荷兰XSENS公司生产,型号为MTi-300-2A5G4,其配置了高性能三轴加速度计、三轴振动抑制陀螺仪等高端硬件,横滚角静态和动态测量精度分别为0.2°和0.3°,广泛应用于机器人、航空航天和自动化等诸多领域。
4.1.2 试验方法
调平系统动态响应试验以井关JKB18C喷雾机为试验平台,喷杆自动调平控制系统、AHRS由喷雾机自带12V直流蓄电池供电。其中,AHRS-1用于检测喷杆姿态、车身倾角传感器和AHRS-2用于检测喷雾机车身姿态,测试系统安装完毕后,同步配置AHRS和车身倾角传感器以及串口调试助手。系统初始化配置完毕后,采用人工调节叉车高度,叉车调速度分快、中、慢3个挡位,分别同步记录车身倾角传感器、AHRS-1和AHRS-2输出的原始数据,最后利用MatLab2014a软件对原始数据进行分析,每组试验重复进行3次。
4.1.3 试验结果分析
为评价喷杆自动调平控制系统对喷杆实时控制的性能,对AHRS-1的测量结果进行计算分析,结果如表1所示。分析表中数据可知:随着车身倾角变化速率的增加,喷杆倾斜角度的平均绝对误差、均方根误差和最大误差增大,平均绝对误差最大为0.90°,均方根误差最大为1.39°,最大误差为1.70°;车身倾角变化速率对喷杆控制精度影响较大;叉车的位置分别在喷雾机前进方向的右侧和左侧时,喷杆的控制精度相差不大。

表1 喷杆上MTi-300数据处理结果
速度挡位是指叉车的提升速度,R是指叉车位置在喷雾机前进方向右侧,L是指叉车位置在喷雾机前进方向左侧。
4.2 田间试验
4.2.1 试验材料
为完成本试验所需要的试验材料包括井关JKB18C水田自走式喷雾机、双天线RTK-GNSS导航定位板卡、喷杆高程控制系统、喷杆自动调平控制系统、差分基站、计算机、MatLab2014a和12V蓄电池、USB转串口数据线等。双天线RTK-GNSS导航定位板卡产自上海司南卫星导航技术股份有限公司,型号为K728 GNSS,横滚角测量精度为 0.4°/R (R为双天线基线长),数据更新频率设定为2Hz,该板卡支持双天线输入,可广泛应用于对高精度定位、定向或授时有要求的领域,包括智能汽车及精准农业等。
4.2.2 试验方法
差分基站放置在田间(见图8),CHANNEL设定为1;将2台三星六频测量天线固定在喷杆上,其中一个位于喷杆中点位置,两个测量天线之间的距离约为2m,差分天线固定在喷雾机车棚顶端。试验过程中,将喷雾机车速挡位设定为1-L、1-M、1-H,手油门居中放置,控制系统根据超声波测距传感器测量到的喷杆与水平面之间的距离调节喷杆高度,根据车身倾角传感器测量数据调节喷杆水平姿态,分别进行喷杆姿态调节(包括高程和水平)与喷杆姿态不调节的对比试验。K728 GNSS车载定位定向板卡实时测量喷雾机喷杆的高程和水平姿态,并将数据通过USB转串口线输入至计算机,保存数据用于后续数据分析。
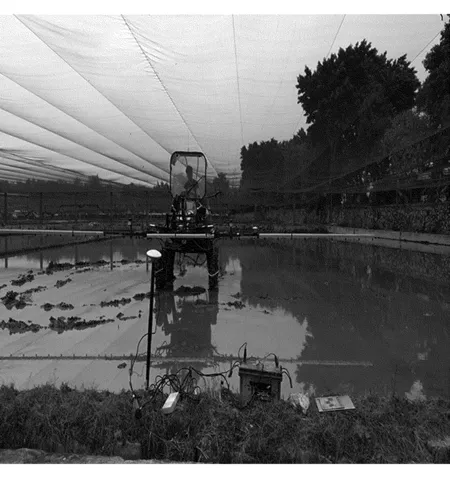
图8 田间试验
4.2.3 试验结果与分析
为评价喷杆自动调平控制系统的性能,采用K728 GNSS车载定位定向板卡实时测量喷杆的实际倾斜角度,数据处理后获得喷杆倾角的平均误差、均方根误差和最大误差,结果如表2所示。试验表明:喷雾机行走速度对喷杆水平调节有影响,喷杆相对于水平面的平均绝对误差最大为0.79°,均方根误差最大为0.85°,最大误差为1.70°,喷杆自动调平控制系统可以对喷杆水平姿态进行有效控制。
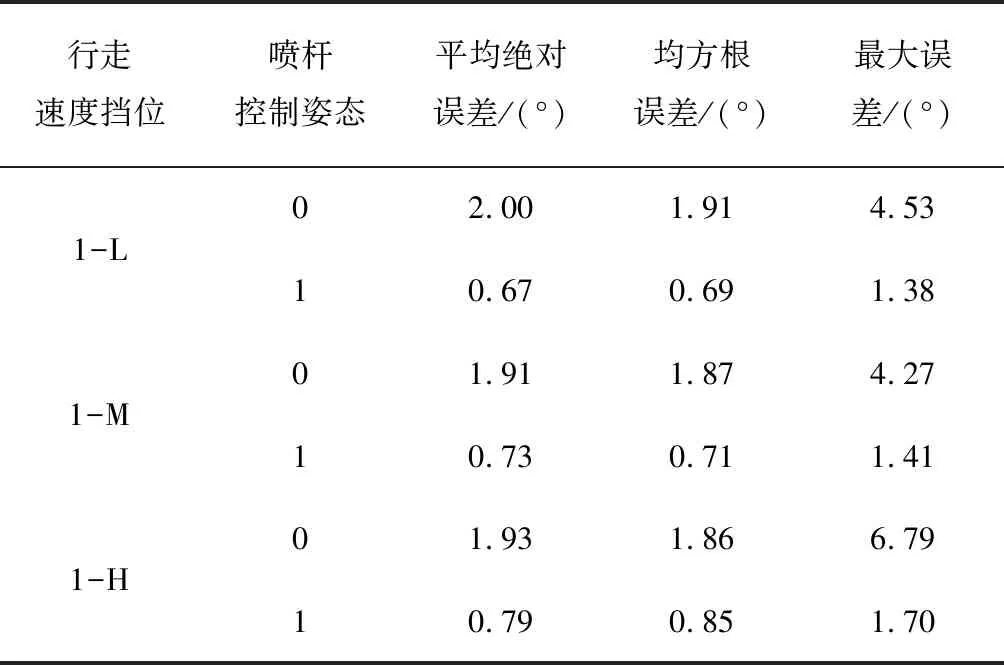
表2 喷杆水平数据处理结果
0表示控制器不对喷杆进行水控制,1表示控制器对喷杆进行水平控制。
5 结论
1)设计了一种喷杆自动调平控制系统,包括基于MEMS惯性传感器的喷雾机车身倾角传感器和控制器,实现了对喷杆水平姿态的自动控制。
2)基于水田自走式喷雾机设计了喷杆调平试验,使用AHRS分别测量喷雾机车身和喷杆倾角。试验结果表明:随着车身倾角变化速率的增加,喷杆倾斜角度的平均绝对误差、均方根误差和最大误差增大,平均绝对误差最大为0.90°、均方根误差最大为1.39°、最大误差为1.70°,车身倾角变化速率对喷杆控制精度影响较大。
3)为考察喷杆自动调平控制系统的田间作业性能,采用K728 GNSS车载定位定向板卡测量喷杆水平倾角数据进行了田间试验,结果表明:喷杆姿态变化幅度明显减小,喷雾机行走速度对喷杆姿态调节精度有较大影响,喷杆相对于水平面的平均绝对误差最大为0.79°,均方根误差最大为0.85°,最大误差为1.70°。
