低功耗蓝牙纯电动智能车监测系统设计*(续2)
2019-05-09朱浩夏范昌吉祥杜勇志江银锋鄂加强邓元望
朱浩 夏范昌 吉祥 杜勇志 江银锋 鄂加强 邓元望
(1.湖南大学;2.湖南宏迅亿安新能源科技有限公司)

1.1.4 低功耗蓝牙主从机电路板
低功耗蓝牙模块采用美国某公司的CC2541 芯片,如图5 所示。该芯片遵循V4.0 BLE 蓝牙协议规范,配置空间为256 KB,支持AT 指令,用户可根据需要对串口波特率、配对密码、设备名称等参数进行设置,使用灵活。另外,模块支持UART 接口,具有成本低、体积小、功耗低及收发灵敏度高等优点[10]。通过DC/DC 转换电路将输入的5 V 直流电压转换为3.3 V 直流电压,给蓝牙4.0 主从机供电,工作频率为2.4 GHz,自动休眠,待机电流为400~1.5 mA,传输时电流为8.5 mA。

图5 蓝牙4.0 主从机电路原理截图
低功耗蓝牙模块的27 脚(P0_7)是软/硬件主从设置选择口。如果此口置低(或悬空),则为硬件设置主从模式,如果置3.3 V 高电平,则为软件设置主从模式。低功耗蓝牙主从机选择软件设置主从方式,此口接3.3 V 电源。通过28 脚设置实现主从模式;如果选择软件主从模式,可以通过AT 命令查询和设置,所以本低功耗蓝牙主从机采用AT 指令设置主从模式。状态指示灯D2 接蓝牙4.0 模块的P1_2(24 脚),用于指示其所处状态。慢速闪烁表示搜索及连接中,长亮表示已经建立连接。
1.1.5 智能车整车控制器电路板
智能车整车控制器采用某公司的16位单片机MC9S12XS128MAA。该芯片的最小系统,如图6 所示。在该芯片最小系统中,芯片起振采用接在33 引脚(EXTAL)和34 引脚(XTAL)的16 MHz 的无源晶振Y1;电源使用5 V 直流电供给电源77 引脚(VDDX1)、29 引脚(VDDX2)和31 引脚(VDDR);复位为接30 引脚的按钮PB1 控制的低电平复位。

图6 MC9S12XS128MAA 芯片最小系统电路原理截图
智能车的车速信号通过EA62- CS3C 欧姆龙编码器的200 线进行采集,信号经PT7 引脚输入单片机MC9S12XS128MAA 的定时器模块,经过脉冲累加功能进行车速信号计算的前期处理。智能车转向机构采用舵机与连杆机构,舵机作为原动机,连杆机构作为从动件。舵机与连杆机构控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。在内部设计一个基准电路,产生的基准信号周期约为20 ms,宽度为0.5~2.5 ms,然后比较直流偏置电压与电位器的电压,获得电压差输出。最后,电压差的正负输出到电机驱动芯片,决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。通过PWM信号占空比的改变控制舵机的位置变化。
CAN 总线采用MC9S12XS128MAA 芯片内部集成的MSCAN 模块,符合CAN2.0A 和CAN2.0B 通信协议要求,采用某公司的TJA1050 作为CAN 总线收发器。CAN 总线系统,如图7 所示。CANTX 和CANRX 分别接MC9S12XS128MAA 芯片的74 引脚和75 引脚,经过TJA1050 后,转换为CAN 总线的CANH 和CANL,然后接双绞线进行CAN 通信[11]。

图7 CAN 总线系统框图
1.2 监测系统程序设计
程序设计主要包括锂电池充放电板程序、锂电池温度采集板程序、蓝牙4.0 主从机配对指令和智能车整车控制器程序三部分。程序通过C 语言进行编写后,利用串口或BDM下载器进行程序烧录,然后进行硬件测试。
1.2.1 锂电池充放电板程序设计
锂电池充放电程序框图设计,如图8 所示。LTC2943 锂电池监测程序主要通过I2C总线获取锂电池的实时状态信息,I2C 总线通信的程序主要包括启动I2C总线、停止I2C总线、响应、读/写一个字节及I2C总线时钟。通过对相应地址的寄存器进行读取/写入操作,实现对锂电池电压、电流、温度及电量的实时监测。首先,实现STC89C52RC 单片机和LTC2943 芯片的I2C总线通信,通过STC89C52RC 单片机向LTC2943 芯片写入所需访问的寄存器地址,然后返回原始的锂电池状态数据;通过STC89C52RC 对数据的转换和运算后,得到可以直接显示的锂电池电压、电流、温度及电量,再通过电脑软件或LCD12864 液晶显示器实时显示。

图8 锂电池充放电程序流程图
1.2.2 锂电池温度采集板程序设计
3 个DS18B20 温度传感器单线、总线温度监测程序的流程图,如图9 所示。主要使用的协议命令有33h(读ROM),44h(温度转换),55h(ROM 匹配)、BEh(读暂存器)。流程图分两部分,首先读取3 个DS18B20 的64位光刻ROM地址,然后进行温度传感器单线、总线的编程,通过单线、总线实现3 个DS18B20 温度传感器测量单体锂电池多部位温度的目的。其中DS18B20 的ROM地址通过串口助手输出8 个字节。
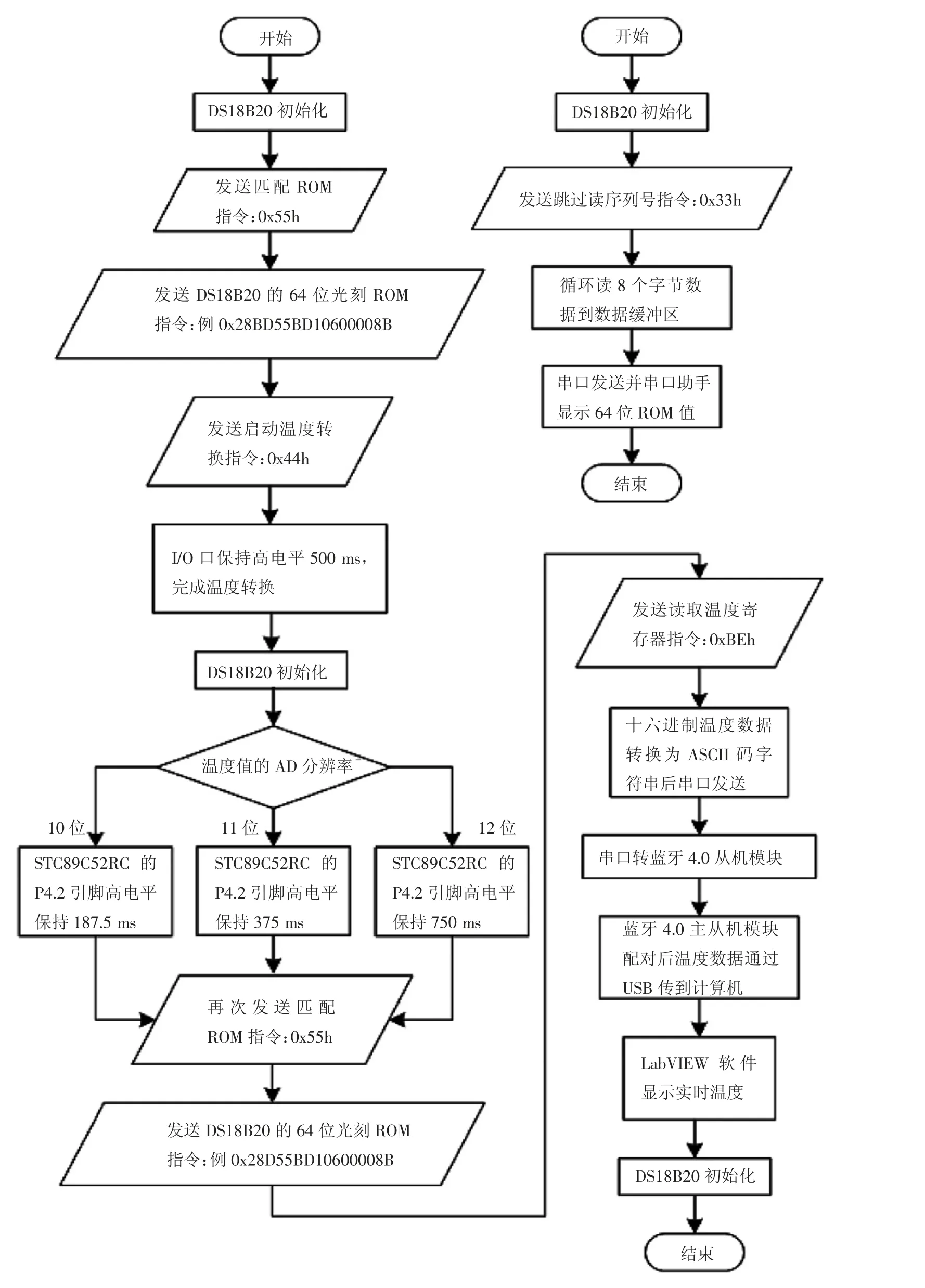
图9 温度传感器的温度监测程序流程图
1.2.3 智能车整车控制器程序设计
智能车整车控制器程序流程,如图10 所示。程序先进行锁相环倍频后,分频给各功能模块,包括脉宽调制模块PWM、定时器模块PIT、串口通信模块SCI 等。电机和舵机驱动都采用PWM信号,但PWM 信号频率不同。对于电机,通过对PWM信号的占空比的控制,改变流过电机电流的大小,进而改变电机的转速,最终达到控制智能车车速的目的。对于舵机,通过对PWM信号占空比的控制,改变舵机的输出转角,实现控制智能车转向角的目的。
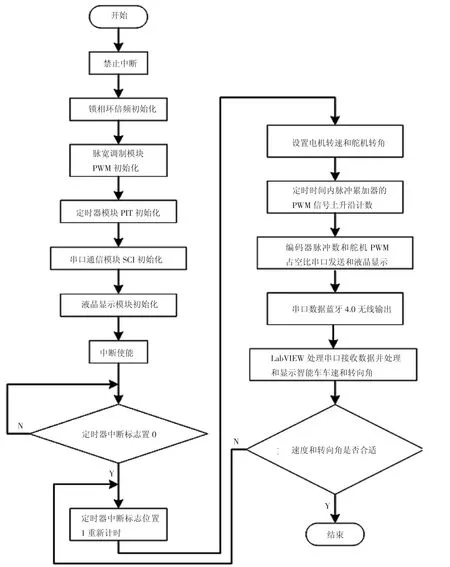
图10 智能车整车控制器程序流程图
1.3 监测系统软件设计
通过LabVIEW 设计了与硬件相匹配的软件及安装包,系统软件包括串口通信模块、数据处理模块和显示与报警模块。串口通信模块的作用是从智能车上获取其状态原始数据,经数据处理模块后得到所需的显示结果,通过显示与报警模块进行结果显示与报警,并返回字符串给智能车,实现了对智能车状态的实时监测,包括智能车车速和转向角数据处理与显示、车载锂电池信息(电压、电流、温度、电量)数据的处理与显示。
2 实例应用
2.1 智能车整车控制器的测试
本系统通过CodeWarrior 5.1 软件进行编译和测试,测试智能车整车控制器能否对输出PWM 控制电机和舵机,以实现智能车的基本行驶功能。通过1 块1.3英寸(3.3 cm)的12864 液晶显示屏和2 个四位数码管显示,内容包括编码器15 ms 产生的脉冲数、舵机的PWM占空比。测试结果,如图11 所示。
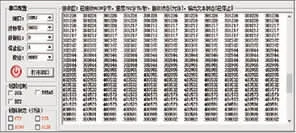
图11 整车控制器调试电脑串口测试结果显示界面
图11 显示结果为智能车正常行驶时,串口助手接收到的6位字符串数据。从图11 可以看出,其中第1位是舵机PWM 占空比,第2~6位是编码器产生的脉冲数。编码器产生的脉冲数不断变化,说明智能车车速在改变,且数值越大、车速越高;智能车整车控制器实现了PWM信号的输出,说明智能车能完成基本行驶功能。
2.2 低功耗蓝牙无线通信测试
低功耗蓝牙无线通信利用串口助手配置蓝牙4.0主从机的配对密码、波特率、主从模式等,然后把蓝牙4.0 从机连接到智能车锂电池温度采集板的蓝牙接口上,接通电源等待蓝牙4.0 主机搜索与连接,实现主从机连接;连接完成后,串口助手开始显示锂电池温度采集板的监测结果。显示的结果,如图12 所示。

图12 无线监测锂电池温度数据显示界面
2.3 智能车监测系统软硬件综合调试
文章开发使用的是LabVIEW 2013,该版本支持WIN7 系统、软件安装包自动生成等功能,编写的软件具有移植性好、安装简单、界面美观、人机交互性好等优点。可通过软件安装包在其它电脑上安装,方便用于未装LabVIEW 软件的电脑使用。图13 示出智能车状态监测系统的完整硬件。
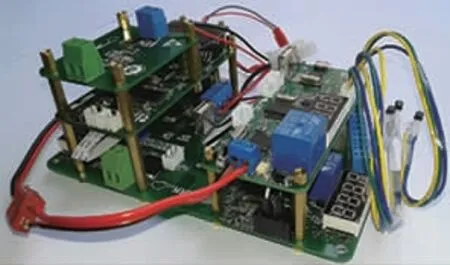
图13 智能车监测系统完整硬件示意图
从图13 可知,智能车监测系统硬件包括电路设计的全部电路板,并通过杜邦线等进行了电气连接,然后,将其安装到某B 型车上,主要是电机、舵机、编码器及锂电池的电气连接,还有硬件与车体的六角铜柱机械连接,最终形成一个完整的智能车状态监测系统。
图14 示出本系统的软件界面。在系统软件安装完且保证其硬件供电正常条件下,打开并选择相应的硬件COM口,就可实现智能车状态的监测。软件显示有2 个温度监测,分别标有温度和DS18B20 字样。其中标温度的显示模块为LTC2943 芯片内部集成的温度传感器,用于监测放电板的温度;标DS18B20 的显示模块循环显示锂电池前侧、上侧和右侧的温度,用于监测单体锂电池的温度。本系统软件实现了锂电池的电压、电流、温度及电量值的实时监测显示,还能对高于或低于设定阈值的某1 项或几项进行报警,即点亮对应报警按钮。另外,软件还可实时绘制电压和电流的时间变化曲线图,方便以后对锂电池进行SOC 估算。此智能车监测系统软硬件的正常运行,实现了监测功能。

图14 智能车监测系统显示的软件显示界面
3 结论
基于蓝牙4.0 和某大赛B 型车,以优化纯电动车实时监测系统的线束和控制为目的,设计了低功耗蓝牙电动车智能监测系统,包括硬件电路设计、程序设计、软件设计及软件测试。以C 语言的定时器中断方式设计了驱动程序,用LabVIEW 生成了界面可视化的软件。实测样机表明本系统软件实现了锂电池的电压、电流、温度和电量值的实时监测显示,还能对高于或低于设定阈值的某1 项或几项进行报警,智能车监测系统软硬件正常运行,实现了监测功能,证明该设计可行。
(续完)
