汽车线控转向系统及关键技术研究
2019-04-27王忠栋
王忠栋
摘要:本文在对汽车线控转向系统的结构及原理进行介绍的基础上,从汽车转向系统的上层控制方法及下层控制万法两个方面阐述了线控转向系统的控制内容,并对线控转向系统的关键技术进行了研究。
关键词:汽车;线控转向系统;关键技术
1 引言
随着科学技术的快速发展,各类事物不断推陈出新。在汽车行业,传统的转向系统为机械式控制,汽车驾驶员通过对驾驶环境的判断来进行手动机械操作,进而实现汽车的转向,共性能好坏,直接影响了汽车在转向过程中的安全系数。而在拥有成熟电子信息技术与控制理论的今天,汽车转向系统已完成了几代技术革新,已从早期的机械式转向系统走向线控转向系统,期间还发展过液压助力、电控液压助力及电动助力转向系统几大系统。总体来说,使汽车的安全性、经济性及环保性不断地得到提高,而随着人们对汽车的安全可靠性及环境友好性的追求越来越高,改善汽车的驾驶特性已刻不容缓,因此,汽车线控转向系统技术开始成为全世界范围内的研究热点。
2 线控转向系统结构与原理
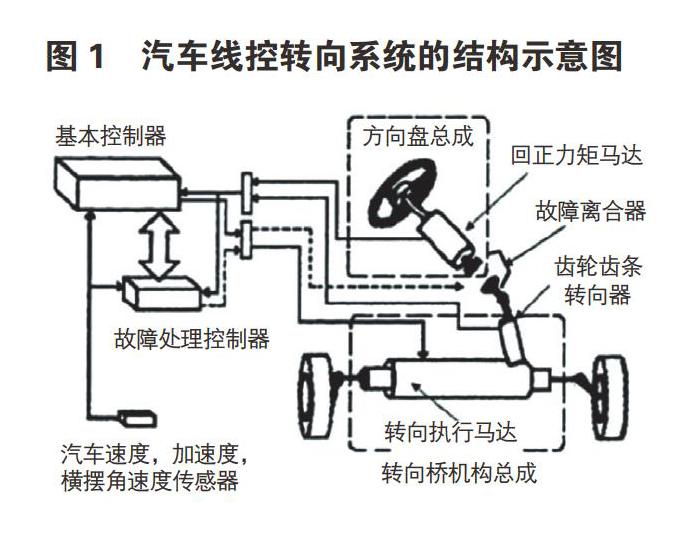
汽车线控转向系统的结构示意图如图1所示,其主要组成部分包括方向盘总成、转向桥机构总成、基本控制器、故障处理系统及各种传感器等。其具体组成部分及作用为:
(1)方向盘总成部分:方向盘总成由方向盘组件、电机及各种方向盘传感器(如转角传感器、力矩传感器等)组成。其主要作用为根据汽车方向盘转角变化来实现对汽车基本控制器的控制,基本控制器把转换的数字信号反馈至控制方向盘的电机上,进而给驾驶员提供相应的环境信息。
(2)转向桥机构总成部分:转向桥机构总成具体由前轮转向组件、方向盘转向电机及其控制器与前轮转角传感器等组成。其主要作用是为了实现驾驶人员对车辆的转向操控意图。基本控制器通过反馈得到前轮转角信号,通过分析处理,对车辆的运动状况进行判断,进而针对转向电机应转的前轮转角大小发布命令。另外,基本控制器能够对转向操作的合理性进行识别判断,对驾驶员实施的误操作能够做出屏蔽处理,在一定程度上保障了车辆驾驶人员的安全性,实现汽车的平稳自动转向。
(3)故障处理系统是线控转向系统的重要组成部分,其能够通过对行驶车辆的监测做出相应的处理,进而保障了车辆的安全驾驶,见图1。
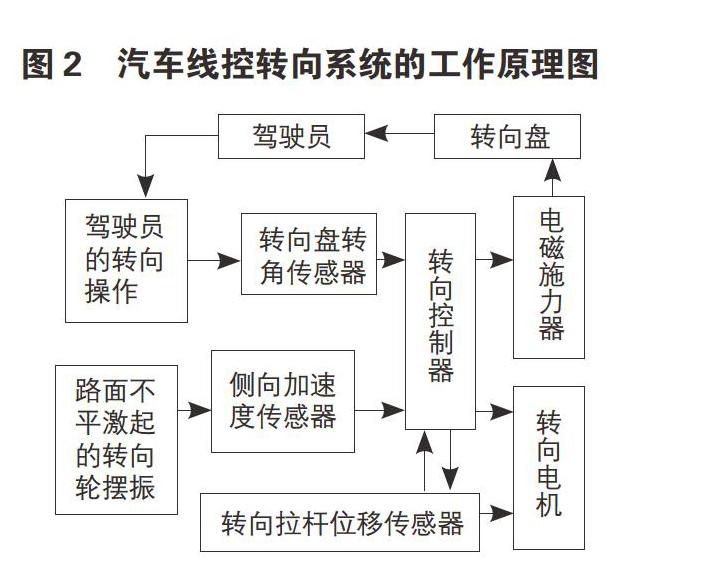
汽车线控转向技术之所以能提高汽车的驾驶安全可靠性,与其具有的故障检测手段息息相关。图2为汽车线控转向系统的工作原理图。对其工作原理具体可以进行以下描述:当方向盘上的转角发生变化时,转角传感器将其收集到的转角信息转换为数字信号传送到控制器上,通过控制系统上计算机处理后,反馈至控制车轮转向的电机上,从而实现车辆的转向。
3 线控转向控制的内容
线控转向控制的研究包括上层控制方法和下层控制方法两个方面的内容,其中上层控制方法主要包括四个方面的研究内容,分别为转向传动比的计算方法的研究,四轮转向控制的研究,车辆稳定性的控制方法以及汽车路径跟踪控制等,下层控制方法主要包括转向电机的控制研究。具体内容为:
(1)转向传动比的计算方法:为使驾驶人员在操作汽车转向时尽可能地减少体力消耗及精神消耗,在汽车行驶过程中,要求其转向传动比随着车辆的速度大小及其方向盘的转角变化。在低速行驶过程中,转向传动比会随着车速的增大而增大,而当车速较高时,其转向传动比的增大幅度会逐渐减小,这样能够减小转向传动比带来的影响,缓解不断加减速给驾驶人员带来的驾驶疲劳。另外,为了达到最佳的驾驶舒适度,常常根据车速对汽车的转向传动比进行系统优化。常采用的方法有遗传算法,仿真和驾驶模拟器试验验证法,基于MATLAB模糊控制工具箱设计转向传动比算法及利用ADAMS软件进行双移线等工况仿真等。
(2)四轮线控转向控制:为了达到提高汽车侧向性能的目的,常采用四轮转向控制的方法,通过建立车辆传动齿轮的线控转向系统模型,在改变车速的情况下结合动力学知识,并通过引入动态调整边界层厚度的变结构控制器,对不同转向操纵下的汽车转向控制进行模拟,结果表明:在一定的操纵范围内,最优控制下,四轮转向控制能够提高汽车的侧向性能。
(3)车辆稳定性控制:为了提高车辆转向的稳定性,优化汽车稳定性控制效果,需对驾驶过程中的横摆力进行控制,以提高其响应速度,降低摆动幅度。为了解决输入约束与线控转向系统非线性的问题,采用非线性模型预测控制,对非线性集合隶属度进行辨识,通过仿真操作,证明了集合隶属度预测控制方法能够实现车辆侧向稳定性的提高。通过对安装双摇臂型线控转向系统的丰田COMS车辆进行试验,高精度估计路面状态,有效验证了采用侧向力传感器和道路回正力矩估计器能够提高识别路面状态的精度,提高控制器对方向盘反馈的速度,优化操作性能,从而确保汽车的转向稳定性。
(4)车辆路径跟踪控制:车辆的路径跟踪控制研究采用Lyapunov法,通过建立的车辆模型,设计形成连续时变的非线性跟踪控制器,通过仿真分析,结果显示汽车的仿真路径与实际路径相比几乎0误差,表明模拟工况能够很好地对车辆路径进行跟踪。
(5)转向电机的控制:汽车转向控制的实现离不开转向电机,它是转向控制系统最重要的研究内容,汽车转向控制的效果深受转向电机的影响。对转向电机的控制,常采用高性能的永磁转向电机进行转向控制,在采用直流电机控制时,设计为PID参数控制,并通过试验验证了采用PID控制转向电动机的可靠性,其具有更快的响应速度,改善了汽车的转向控制性能。
4 线控转向系统的关键技术
目前,线控转向系统的关键技术在传感器、动力电源、总线的设计上,另外还包括可靠性技术,具体为:
(1)传感器技术:在线控转向系统中综合应用各种传感器技术,能够提高汽车转向控制系统的灵敏度及精准度,随着电子控制技术的高速发展,传感器的质量越来越高,传感器的信息采集能力提高了汽车转向控制系统的响应速度。目前运用到汽车转向系统中的传感器包含的种类较多,例如速度、角速度传感器,转矩传感器,侧向加速度传感器等等。
(2)动力电源技术:汽车线控转向系统中的控制单元与反馈电机的工作都需要电源支持,因此,动力电源的重要性不言而喻,其性能的好坏直接影响着整个线控转向系统运行的稳定性。为了应对汽车电子控制系统中元器件日益增多造成的耗能增大的情形,研究容量大、性能好的动力电源至关重要,以往采用的12V动力电源已无法满足现代化汽车的电力供应,因此,设计出了42V的动力电源技术,该技术的应用又进一步推动了汽车线控转向系统的发展。
(3)总线技术:总线技术影响着线控转向系统各子系统集成布局方式,汽车的总线标准有很多,目前常用的总线技术有TTP、Byteflight与Flex Ray三种。未来随着科学技术的不断发展,將会产生更加高速、实时传输的总线技术,实现汽车线控转向系统的智能化水平的进一步提高。
(4)可靠性技术:为了发展线控转向系统,需要不断地提高其可靠性,为了防止电控系统发生故障,现在在设计线控转向系统时往往设计成有多个车载电源、转向传感器,以提高其可靠性。
5 结论
随着电子信息控制技术的不断发展,在车辆上运用的线控转向系统会越来越成熟,技术会越来越先进,在提高汽车操控稳定性的同时,能够给驾驶人员提供更佳的驾驶体验。
参考文献:
[1]王菊,左建令汽车线控转向技术的研发现状及发展前景[J].汽车研究与开发,,2005. ( 05):30-35
[2]贾和平,钟绍华.汽车线控转向系统的研究[J]上海汽车,2006,( 11):39-43.
[3]于蕾艳,吴宝贵,伊剑波汽车线控转向系统转向控制研究[J]江苏大学学报(自然科学版),2014,35( 03):267-273
