并联踝康复机器人的系统搭建与运动控制策略
2019-04-17李剑锋张子康张雷雨董明杰左世平张凯
李剑锋,张子康,张雷雨,董明杰,左世平,张凯
(北京工业大学机械工程与应用电子技术学院,北京,100124)
随着我国老龄化的加剧,脑卒中发病率逐步升高,多数患者存在足下垂导致的下肢运动功能障碍[1−3]。同时,马蹄足内/外翻亦属于我国少年骨科多发病,需进行踝关节松解、矫形手术治疗。为改善下肢运动功能和步态重建,上述患者均需对踝关节进行大量重复性的康复训练。传统的康复训练疗法是康复治疗师对患者进行一对一的徒手康复治疗,其不足之处是效率低下、劳动强度大、缺乏科学有效的数据监测与反馈,难以对患者的康复状况进行数值化评价。为弥补上述不足,人们相继开展了踝康复机器人的相关研究工作。GIRONE 等[4−5]研制了基于Stewart 型平台的六自由度Rutgers Ankle,通过虚拟现实与力反馈技术实现康复训练的力触觉反馈功能,但该系统结构复杂,成本较高;SAGLIA 等[6]开发了高性能两自由度踝康复机构,通过驱动冗余消除奇异性,提升其工作空间。CHANG等[7−8]利用串联式弹性驱动,搭建了铰链式踝足康复系统,采用旋转电位计测量踝关节背屈角度,同时在足底增加了6个压力传感器,用于检测行走过程中接触力及人体重心分布。WANG 等[9−10]研制了3-UPS/RRR和3-RUS/RRR 冗余驱动踝康复机器人,通过冗余驱动避免装置在工作过程中的奇异性,提高机器人的刚度和运动灵活性。禹润田等[11]设计了绳驱动并联踝康复机器人,采用绳驱方式,在运动过程中可避免刚性杆件惯性冲击,安全性较高。边辉等[12]研发了4-UP(Pe)S/PS 康复机构,将人体小腿置于机构中心,4条支链均匀分布在人体下肢周围,人体与支链共同构成生物融合式并联踝康复机构。基于上述研究可知,人们在踝康复机器人辅助训练方面已取得了较大突破,但仍存在一些不足,如机构自由度不足或冗余、机构旋转中心与踝转心难以重合、自适应调整能力及人机交互性水平较低等问题[13]。因此,研究智能康复机器人结构与控制方法,准确识别患者的运动意图,实现机器人自适应控制与人机交互功能,是康复机器人研究的关键问题[14]。本文作者设计并研制了一套具有3个转动自由度,机构旋转中心与人体踝关节转心重合的2-UPS/RRR 并联踝关节康复机器人(parallel ankle rehabilitation robot,PARR),机器人系统采用上位机与下位机共同控制的分布式控制方法,基于编码器与力/矩传感器的力位信息检测,实现轨迹跟踪控制、运动意图识别及人机交互控制,完成踝关节康复机器人主/被动康复训练。
1 并联踝康复机器人系统搭建
1.1 机器人机构本体设计
人体踝关节属于滑车关节,主要运动方式为沿3个方向的定点转动,根据踝关节运动形式及特点,可把踝关节的运动描述为分别沿坐标轴Xa,Ya和Za的转动,实现距骨滑车相对关节球窝完成背伸/趾屈、内翻/外翻与内收/外展运动[15],如图1所示。由于存在人体差异,踝关节运动幅度不尽相同,正常人体踝关节运动范围如表1所示[16]。
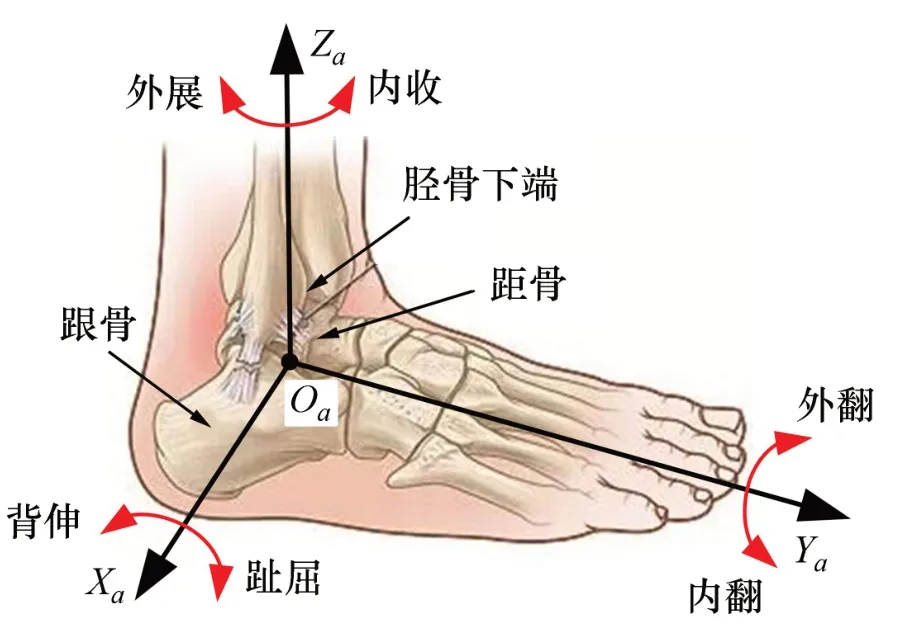
图1 踝关节骨骼结构Fig.1 Skeleton structure of ankle joint
李剑锋等[17]对现有的踝康复机器人构型进行综合与优选,提出了基于并联机构构型的3自由度2-UPS/RRR 踝康复机器人构型(其中,P和R分别表示主动移动副和转动副),进而完成并联踝康复机器人的结构设计与分析。并联踝康复机器人机械结构主要由定平台、动平台、2条UPS支链(U1P1S1和U2P2S2)和1条串联的RRR约束支链(R1,R2和R3)组成,如图2所示。其中,约束支链为1个等效球关节支链,其3 条转轴轴线正交于1 点O,该点即为机构旋转中心与人体踝关节旋转中心的重合点;UPS 支链由虎克副U、移动副P和球副S 组成,2条UPS 支链对称分布在机构动平台两侧,UPS 支链的虎克副U与球副S分别与定平台和动平台固定连接。踝康复机器人具有3个转动自由度,分别绕定坐标系OXOYOZO的XO轴、YO轴、ZO轴转动。该机器人通过驱动移动副P1、移动副P2和转动副R1实现3个自由度的转动运动,移动副P1和P2分别通过电动推杆代替,实现直线运动功能,在转动副R1位置安装了步进电机,实现转动运动功能。在机器人转动副R1,R2和R3位置均安装了绝对式编码器,分别用于检测踝康复机器人做背伸/趾屈、内翻/外翻与内收/外展运动的角度与角速度信息,实现机器人的轨迹跟踪控制。
2-UPS/RRR 并联踝康复机器人动平台主要包括上平台、传感器支座和下平台3个部分,力/矩传感器安装在上平台与下平台之间,如图3所示。踝关节康复运动时产生的力矩作用在上平台表面,在上平台与传感器支座之间安装有4个拉压力传感器,呈矩形均匀分布在机构转心四周。当踝关节做背伸运动时,传感器1和2承受向上的拉力,传感器3和4承受向下的压力,根据传感器读数和布置尺寸,通过计算可得到背伸运动转矩;反之,当踝关节做趾屈运动时,同样可得到趾屈运动转矩。同理,踝关节做内翻/外翻运动时产生的拉/压力分别通过传感器1和3 与传感器2和4 测量,经计算得到其对应力矩。在传感器支座与下平台之间安装有单轴扭矩传感器,可直接检测踝关节做内收/外展运动时的转矩。因此,力/矩传感器与绝对值编码器共同构成了踝康复机器人的力/位信息采集系统。

图3 力矩信息采集系统架构Fig.3 Structure of torque information collection system
1.2 机器人的控制系统搭建
机器人除了具备机械本体外,与其配套的控制系统亦必不可少,对于多自由度机器人的运动控制,主要有集中式和分布式,踝康复机器人采用上位机+下位机的分布式控制方式[18]。上位机用于搭建人机交互界面,设定/修改机器人的运动参数,并实时显示机器人的运动状态信息;下位机用于接收上位机的运动指令,控制机器人动平台做出相应运动,同时,下位机采集各传感器的数据,并将采集和处理后的力/位传感器信息发送给上位机。人机交互功能可通过人体肌电信号和力/位置信息2种途径实现[19]。本文利用力/矩传感器和绝对值编码器组成的力位信息采集系统,获取人机之间的作用力矩及机器人动平台各自由度的位置信息,实现人机阻抗控制和交互功能[20]。采用2个电动推杆和步进电机作为驱动单元,绝对值编码器用于检测动平台转动角度与角速度,进而得到动平台的姿态特征,并通过反馈闭环调节电机的运动,实现机器人的轨迹跟踪闭环控制,控制系统硬件组成如图4所示。

图4 控制系统硬件组成Fig.4 Hardware of control system
在康复训练前期,当踝关节肌力较弱,难以实现自主运动时,采用被动康复训练模式,机器人按照医师规划的运动轨迹,带动踝关节进行反复康复训练。当踝关节恢复部分运动功能时,采用主动康复训练模式[21],通过检测踝关节施加在动平台表面力/矩的大小和方向,判断患者的运动意图,辅助踝关节按照识别出的运动意图方向进行康复训练运动。随着康复训练效果的累积与患者踝关节运动功能的逐渐恢复,可逐渐增加康复训练的运动幅度与运动阻抗,训练踝关节自身的运动范围和力量。
2 机器人运动学模型的建立
踝康复机器人具有3个转动自由度,由电动推杆和步进电机驱动,通过控制驱动电机的转速,实现对机器人运动的精确控制,因此,需要建立电机驱动速度vi(i=1,2和3)到动平台角速度ω的映射关系。如图5所示,在定坐标系OXOYOZO的原点O处建立动坐标系MXMYMZM,且与动平台固连,两者在初始位置重合。Ai和Bi(i=1,2)分别为虎克副中心点和球副中心点,在Ai位置建立坐标系AiXA,iYA,iZA,i,ZA,i坐标轴与矢量AiBi重合,在Bi位置建立坐标系BiXB,iYB,iZB,i,并与AiXA,iYA,iZA,i坐标系平行。
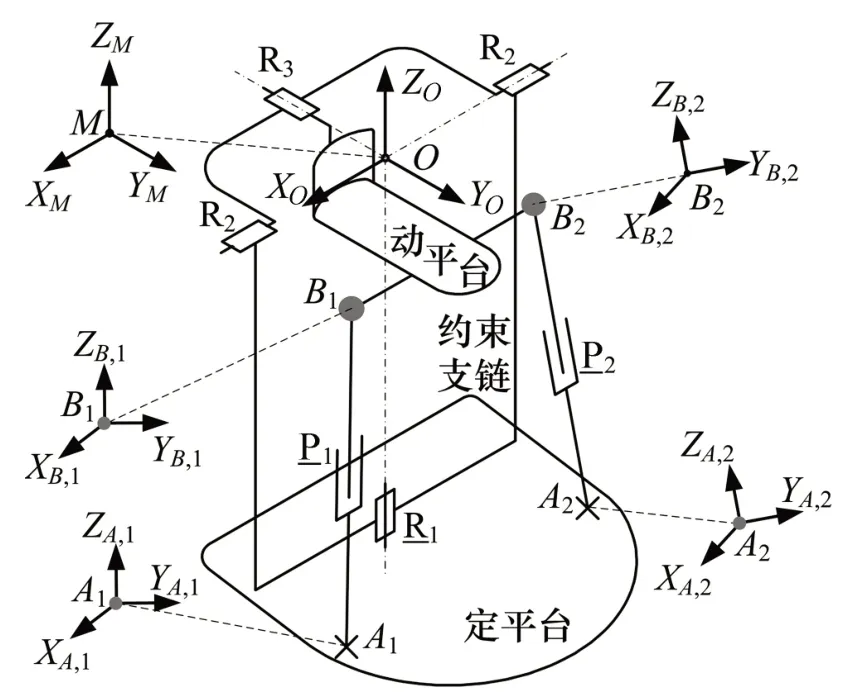
图5 踝康复机构坐标示意图Fig.5 Diagram of Coordinate of ankle rehabilitation mechanism
动平台的运动姿态采用欧拉角表示,动平台绕坐标轴XO,YO和ZO的转角分别用α,β和γ表示,则动坐标系MXMYMZM相对于定坐标系OXOYOZO可以表示为

球副Si(i=1,2)固定于电动推杆前端,其沿移动副Pi方向的运动速度即为移动副的运动速度,球副中心点Bi(i=1,2)在定坐标系OXOYOZO中的位置矢量OBi与速度VB,i可分别表示为:
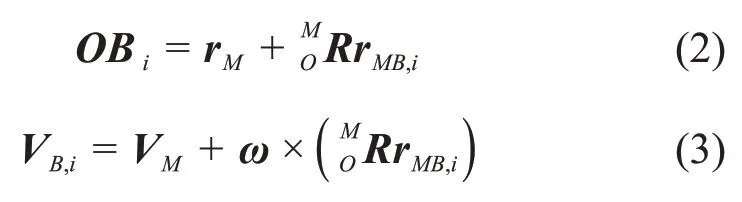
式中:rM为原点M在坐标系OXOYOZO下的位置矢量;VM为动坐标系原点M的速度;ω为角速度矩阵;rMB,i为点Bi在动坐标系MXMYMZM中的矢量坐标。
将VB,i沿ZB,i坐标轴分解得球副中心点Bi沿ZB,i坐标轴的速度VZB,i

式中:ZB,i为Bi沿ZB,i坐标轴的方向向量,且ZB,i=。
由UPS 支链的结构特点及式(3)和式(4)可得UPS支链的伸出速度vi:

由机器人机构特征可知动平台绕坐标轴ZM转动的角速度v3为:

式中:ωγ为转动副R1处步进电机的角速度。
参照人体踝关节的运动参数范围,在保证机器人工作空间的前提下对机器人结构参数进行优化,得到在机器人初始状态下点Ai和Bi在定坐标系OXOYOZO下的坐标值,如表2所示。

表2 点Ai和Bi的坐标值Table 2 Coordinate values of points Ai and Bi
将踝康复机器人结构参数代入式(5)和式(6),借助Matlab软件进行数学计算。
1)当机器人做背伸/趾屈运动时,电动推杆1的速度VX,P1、电动推杆2的速度VX,P2及步进电机的速度VX,R1分别为:

式中:f1(α)和f2(α)为关于角度α的函数;ωα为动平台绕XM的角速度。
2)当机器人做内翻/外翻运动时,速度参数VY,P1,VY,P2及VY,R1分别为:

式中:f1(β)和f2(β)为关于角度β的函数;ωβ为动平台绕YM的角速度。
3)当机器人在做内收/外展运动时,速度参数VY,P1,VY,P2及VY,R1分别为:

式中:f1(γ)和f2(γ)为关于角度γ的函数。
由式(7)~(15)可知:电动推杆的速度与动平台运动角速度呈非线性关系,因此,要满足康复训练过程中动平台的恒定角速度,需对电动推杆速度进行精准控制。
3 康复训练控制策略
与工业、家用等机器人相比,康复机器人的作业对象是人,故对机器人系统的可靠性、准确性及智能程度要求更高[22]。在机器人应用中,人和机器通过信息交流共同完成同一目标即为人机交互,而人机交互功能实现的前提就是机器人能够准确识别人的运动意图,配合其完成期望运动。在康复机器人中,多将人机交互力/矩作为人的运动意图,通过识别该运动意图完成特定动作,而本文提出的踝康复机器人是基于角度、力矩信息检测的运动意图识别与人机交互控制,开发主、被动康复训练功能,辅助完成人体踝康复训练工作。
3.1 被动康复训练
踝康复机器人被动康复训练需要根据患者的肌力等级,设定康复训练运动轨迹(角度、位置)及最大运动角速度,动平台带动踝关节沿预定轨迹运动,绝对值编码器持续检测动平台各自由度的运动位置,与预定轨迹实时对比,并加入PD控制对系统进行实时比例−微分控制,保证康复训练轨迹的准确性与稳定性[23]。系统控制方程为

式中:ωp为被动康复模式下角速度ω的任意分量,KP和KD分别为比例系数和微分系数;qd,和分别为动平台运动的目标角度、期望角速度和期望角加速度;q,和分别为动平台当前的角度、角速度和角加速度;qe和分别为动平台运动的角度误差和角速度误差。
由式(16)可知:设定合适的比例系数KP和微分系数KD,再根据编码器实时读取的角度和计算出的角速度与角加速度,结合设定的运动轨迹,即可得到动平台在各位置运动的角速度ω,再结合式(7)~(15)可计算出驱动电机运动速度,驱动PARR按照预设的运动轨迹运动,其系统控制流程如图6所示。

图6 被动康复训练控制流程图Fig.6 Control flow chart of passive rehabilitation training
3.2 主动康复训练
踝康复机器人主动康复训练功能是基于人机交互与导纳控制实现的,导纳理论来源于机械阻抗、速度和作用力之间的关系,导纳控制可以建立人体踝关节与机构之间的交互力以及机构运动轨迹调整之间的动态关系[24−25],使康复机器人按照患者的主动运动意图来调整康复训练运动路径,实现患者主动、机器辅助的主动康复训练功能[26]。医师基于患者的肌力等级和患者人体特征预先对各康复训练方向运动幅度和导纳参数进行设定,当踝足沿某方向在动平台上施加的交互力矩达到阻抗力矩阈值且在设定的运动范围内时,机器人提供辅助力矩,动平台则按踝关节力矩方向运动,超出设定运动范围则停止该方向的运行,保证康复训练的准确性与安全性。若在运动过程中该方向所受交互力矩减小至阻抗力矩阈值以下,机器人则停止运行,若该方向或其他方向力矩高于其对应的阻抗力矩阈值,机器人则按其对应的轨迹运动。主动康复训练控制流程如图7所示。
当人体踝关节与机器人产生交互力矩时,为了分析方便,仅考虑单方向的阻抗控制模型,通过阻抗控制产生相应的位置修正量,将位置修正量加入轨迹控制以实现主动康复训练控制。假设踝关节与康复机器人之间的交互力为ef,则其阻抗控制可表示为

图7 主动康复训练控制流程图Fig.7 Control flow chart of active rehabilitation training

式中:md为目标惯量;bd为目标阻尼;kd为目标刚度;Δq为角度修正量;为角速度修正量;为角加速度修正量。
经过阻抗控制得到修正后的期望角度qc、期望角速度和期望角加速度分别为

3.3 控制界面及操作流程
由于踝康复机器人采用上位机+下位机的控制方式,根据系统结构与控制功能需要,上位机系统和下位机系统均采用独立式结构,两者通过无线传输的方式完成信息交换功能。上位机是机器人操控面板的载体,通过上位机可完成主、被动康复训练等功能的操控。康复训练控制界面如图8所示,在该操作界面可完成机器人运行/停止、主/被动康复训练及运动信息读取等,而运动轨迹规划、速度设定及阻抗力矩设定等其他功能则需要切换至其他界面。
下位机是以嵌入式微处理器为核心的运动控制系统,具有角度和力/矩信息的采集与处理、电机速度控制、数据信息发送与接收等功能,康复训练的所有运动均由下位机控制。在进行康复训练时,首先,通过上位机选择康复训练模式,根据训练需要设定各个运动参数,规划运动轨迹或选择运动类型;开始康复训练后,按照系统指示操作即可进行相应的训练动作,同时,可实时通过上位机操作对训练内容进行更改、停止训练,上位机可对运动轨迹进行记录与还原。康复运动控制流程图如图9所示。

图8 康复训练控制界面Fig.8 Control interface of rehabilitation training

图9 康复运动控制流程图Fig.9 Control flow chart of rehabilitation exercise
4 实验验证
4.1 实验平台的搭建
基于上述构型与控制系统设计,研制1台并联踝康复机器人样机,实现基于运动意图识别及人机交互的主、被动康复训练功能。遴选8名受试者(6 名男生,2 名女生,平均年龄26 岁)进行踝康复训练实验,受试者坐在专用座椅上,足底与动平台接触,调节座椅高度,使其与受试者大腿保持水平状态,确保人体腿部重力作用在座椅上,其脚踝通过绑带固定在机器人动平台上,调节动平台高度及脚固定位置,使机器人转心与踝转心重合。在康复实验中,分别进行被动/主动康复训练的背伸/趾屈、内翻/外翻、内收/外展运动实验,对比分析采集数据与预期数据的吻合度,计算运动误差,验证机器人控制系统的可行性与稳定性。
4.2 测量与理论数据的对比分析
在被动康复训练实验中,设定康复训练背伸/趾屈、内翻/外翻和内收/外展运动的角速度分别为3.2°/s、2.7°/s和3.2°/s,从动平台初始位置开始,分别进行背伸—趾屈—背伸、内翻—外翻—内翻及内收—外展—内收动作,每个动作连续运动1个周期,采集实验过程中的角度数据,与预期的角度信息进行对比,以其中一名受试者为例,其背伸/趾屈角α、内翻/外翻角β及内收/外展角γ随时间t的变化曲线如图10所示。
由图10 可知:踝康复机器人实际运动轨迹与期望轨迹具有较高的吻合度,在整个运动过程中,角度曲线斜率恒定,机器人动平台以恒定的角速度运行,运动平稳,平均角度误差小于3°。因此,被动康复训练运动控制策略是有效的,对电机的速度控制也较为精确,满足被动康复训练需要。
在主动康复训练实验中,受试者依次进行背伸/趾屈、内翻/外翻及内收/外展动作,其阻抗力矩阈值分别设为8,6和8 N·m,每个动作循环进行8个周期,采集运动过程中的力位信息,对比分析角度α,β与γ的变化与力矩TX,TY与TZ之间的对应关系。主动康复训练角度与力矩曲线如图11所示。
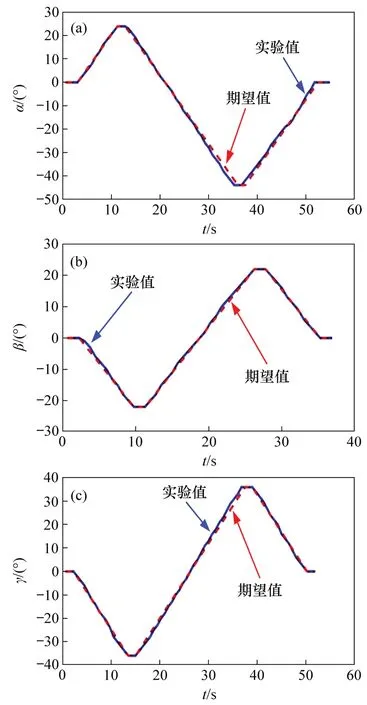
图10 被动康复训练角度的变化Fig.10 Changes of angle of passive rehabilitation training
由图11可知:1)踝康复机器人在起动/停止时刻响应迅速且运动平稳,在运动的准确性、稳定性、响应速度方面均满足康复训练使用要求;2)康复训练过程中力矩曲线变化平稳,反应灵敏,不存在较大的波动,能够满足准确识别患者运动意图的需要;3)当动平台所受力矩达到设定的阻抗力矩阈值后,动平台按照所受力矩方向匀速运动,当动平台所受力矩小于设定的阻抗力矩时,动平台停止运动,判断准确,可较好地完成辅助康复训练的任务。

(a)α与力矩TX;(b)β与力矩TY;(c)γ与力矩TZ
5 结论
1)设计了2-UPS/RRR 并联踝康复机器人,并完成了机器人结构设计与控制系统的搭建,采用上位机+下位机的控制方式,通过编码器与力/矩传感器共同检测力位信息,用于辅助踝关节进行康复训练。
2)建立了踝康复机器人的运动学模型并完成了运动学分析,推导出驱动电机速度与动平台角速度之间的映射关系,基于角度、力矩信息检测的运动意图识别与人机交互控制,制定了完整的机器人康复训练运动控制策略,能够实现踝关节主动与被动康复训练功能。
3)遴选受试者进行踝康复训练实验,检验机器人的主、被动康复训练功能。对比分析了被动康复训练过程中实验值与期望值的吻合度及主动康复训练过程中关节角度随力矩变化的关系,验证了所设计的踝康复机器人运动的稳定性及系统控制方案的有效性。
