基于航拍图像的输电线弧垂测量研究
2019-04-15陆琴心
陆琴心 陈 巍 王 威
1(南京工程学院电力工程学院 江苏 南京 211167) 2(南京工程学院工业中心创新学院 江苏 南京 211167)
0 引 言
输电线弧垂是指在架空线路中,相邻两电杆上输电导线最低点与两悬挂点间连线的垂直距离。当输电杆距离较远时,由于导线自重,使导线呈悬链线的形状,形成轻微的弧垂。
弧垂过大或过小都会影响线路的安全:当弧垂过大时,无法确保导线对地安全距离,恶劣天气可能造成短路事故;当弧垂过小时,导线承受的应力过大,气温过低或冻雨天气时,有可能造成断线甚至电杆倾覆事故。因此监测输电线的最大弧垂,是电网维护工作的重要内容,准确便捷的弧垂测量技术也是国内外电力部门和研究机构的重点研究目标。早期的弧垂测量工作,主要由监测人员现场使用工具或观测仪器测量计算完成,使用的方法有等长法、异长法、角度法、平视法等[1],测量精度较高,但劳动强度大、工作条件差、效率低,而且易受地域条件限制。
国内外电力部门和研究机构长期研究自动监测弧垂技术,如美国The Valley Group Inc.公司生产的CAT-1实时监测装置通过测量导线应力计算弧垂[2]。美国USI公司生产的Power-Donut2和杭州海康雷鸟公司生产的MT系列温度-倾角测量球则是以实时测量导线温度或悬挂点倾角,并通过计算得到实时弧垂的装置[2]。这些装置通过测量导线应力、温度-倾角及高精度图像分辨率来计算弧垂,但无一例外都需要在输电线路或杆塔安装设备,并需考虑数据传输问题,安装和维护成本较高。另外还有Sangeeta Kamboj和Ratna Dahiya使用便携式GPS设备测量计算弧垂[3]、以及国网陕西电力公司王洋、许阳等通过测量地面电场变化的弧垂测量方法[8],但测量效果差强人意,可行性不高。
采用图像处理技术测量弧垂,是目前研究的重点方向。华北电力大学高强、文瑶提出基于部分段图像分析的输电线弧垂计算方法[6],但无法解决未知段图像异常的问题,而且精度过于依赖图像本身;国内黄新波、张晓霞等提出用固定安装在塔杆的摄像机将现场拍摄的图像通过计算机处理和变换来计算弧垂[4],能达到较高的精度,但仍然存在前文提到的成本问题。
应用无人机采集输电线序列图像并分析测量计算弧垂,具有成本低、不受地域影响、快捷高效的优点,受到广泛关注。一般方法是以无人机从多角度获取输电线图像,根据空间成像原理将平面图像中的目标点在实体空间中重建后计算测量。如应用立体像采用前方交会算法推导对应弧垂点的实际坐标值[5];以输电线中的隔离棒作为识别目标,搜索测量出隔离棒中心在序列图像上的像素坐标;再以立体视觉技术计算隔离棒中心的三维空间坐标,建立曲线方程进行计算结果[7]。这些方法的测量结果受照相机和传感器的精度影响较大,对无人机操作有较高要求,对于消费级无人机,受性能制约,测量准确度难令人满意。
本文介绍的弧垂测量方法可使用消费级无人机从多角度获取多幅输电线图像,使用光束平差法获取优化后照相机成像参数,设立输电线为中心的立方体网格点阵,将所有网格点以优化后的成像参数再投影至已经提取出输电线目标的图像平面,设定匹配阈值筛选出构成输电线的网格点,最终应用抛物线方程式进行数据内插完成输电线重建,计算测量弧垂数值。
1 系统建模
从照相机成像原理可以知道,三维空间某点的几何坐标与所得图像上的相应点坐标的相互关系可以简单用下式表示:
(1)
式中:x、y为相应点在图像坐标系中的坐标;x0、y0为对应图形坐标系原点的偏移量;f为焦距;X、Y、Z为成像点实体坐标系中的坐标;Xc、Yc、Zc为照相机在成像时在实体坐标系中的坐标;M为旋转矩阵,取决于照相机在成像时的姿态;Δx、Δy为照相机成像失真;λ为比例因子。
照相机成像时的参数能够通过技术手册和卫星定位系统、传感器等获得,因而从理论上说,只要有两个以上在不同拍摄位置的针对同一点的图像坐标,就可以通过式(1)反推出目标点在实体坐标系中的三维坐标。
2 技术路线
2.1 序列图像获取
考虑到地域环境限制和安全,一般无人机以在输电线路上方拍摄较为常见,飞机在上方跨越输电线,便于照相机以相似的距离拍摄系列图像;设照相机在拍摄时与目标的距离为H,成像焦距为f,感光器成像点距为p,则被拍摄目标的解析度(即地面采样距离)R为:
(2)
实际输电线外径通常为数厘米,而弧垂通常为数米甚至十余米,考虑解析度和弧垂测量精度的要求,解析度R以控制在厘米级为宜。
表1是两款消费级无人机部分参数,根据式(2)可以计算得到,当B款无人机在输电线上方40~50米高度拍摄时,成像解析度约为1.75~2.2 cm,视角宽度约86~106米,如输电线杆距太大还要考虑多幅图像拼接[11];而A款无人机在同样的高度可以获得较高的解析度,但如果要保持足够的视角宽度,则需增加飞行高度,视需要和工作量而定。
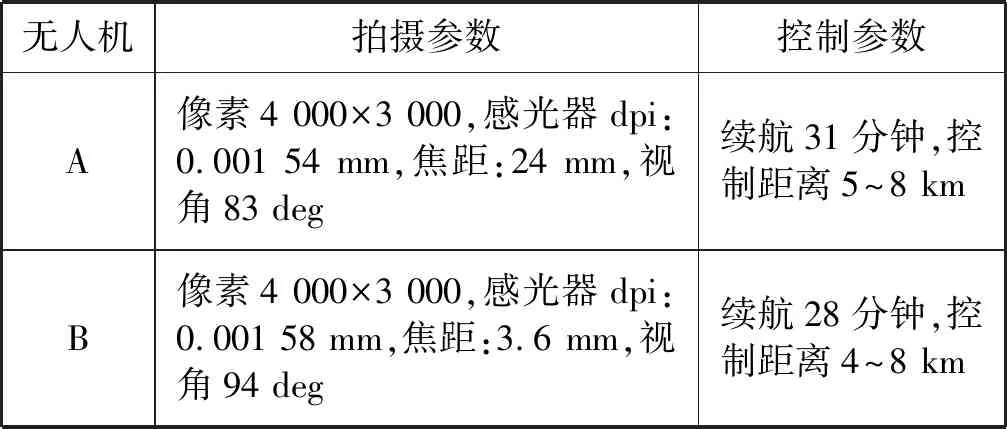
表1 两款消费级无人机部分技术指标
对于同一目标,尽管从理论上讲只要有两幅图像就可以达到目的,但出于冗余和后面要讨论的优化考虑,在输电线两侧各拍摄几幅便于分析比较。
2.2 光束平差法获取成像参数
从已经获得的航拍图像根据式(1)来分析计算目标在实体空间的坐标,其准确率完全取决于照相机成像时参数的准确度。即使在成本许可的情况下,使用高精确度的设备,微小的参数误差和抖动也会极大地影响测试结果,而对于消费级产品而言,不加处理而直接使用原始成像参数进行计算,其结果误差一定是难以令人满意的。
光束平差法(Bundle Ajustment,又译为重投影平差法)的基本原理如图1所示。
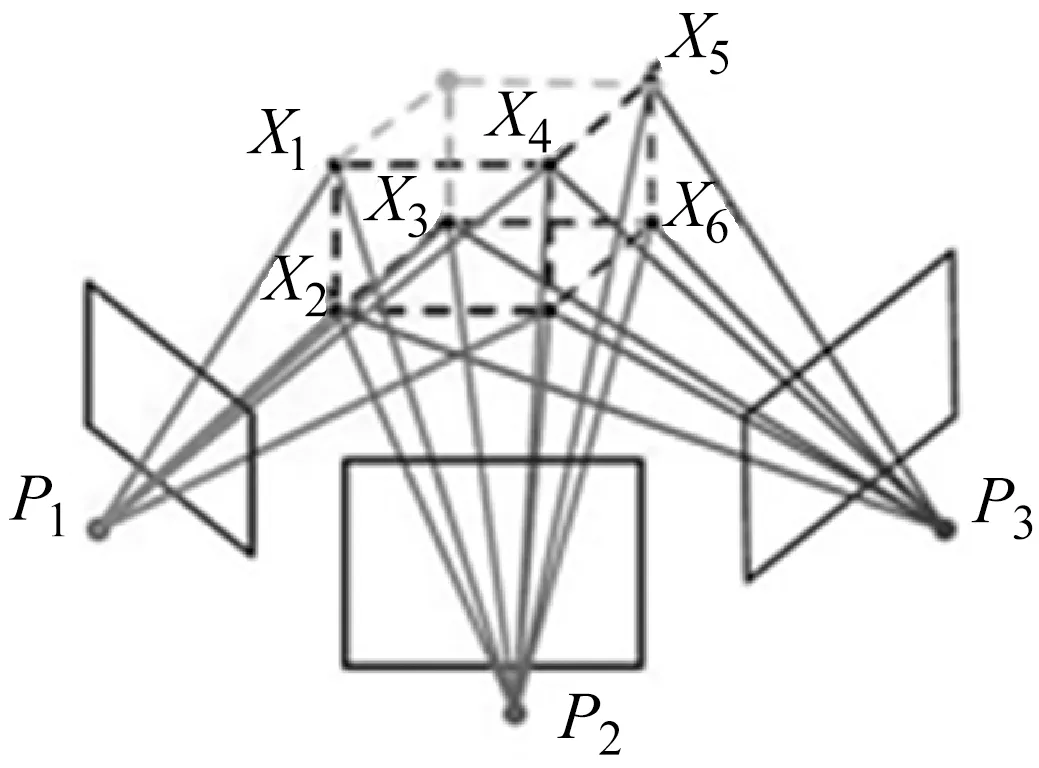
图1 光束平差法
相机从P1-P3拍照,三维模型X投影到图像上;然后利用这些图像对一些特征点Xi进行三角定位(triangulation),最后从计算得到的三维点的坐标(不是真实的)和计算得到的相机矩阵(也不是真实的)进行第二次投影(重投影)。重投影误差是指真实三维空间点在图像平面上的投影(即图像上的像素点)和重投影(前面计算值得到的虚拟的像素点)的差值,一般这个差值不可能恰好为0,此时将这些差值的和最小化获取最优的相机参数及三维空间点的坐标。详细描述可参考文献[9]。
使用光束平差法的目的就是:使用从不同视角拍摄的、描述同一个场景的一系列图片,根据特征点在图像中的投影作为标准,同时提炼出描述场景结构的3D点坐标、相对运动参数和相机的光学参数。提供此算法的处理软件有:MATLAB 2014版或更新、Pix4Dmapper Pro等。
经过光束平差法预处理后,照相机成像时内外方位参数精确度大大提高,表2是上文所列无人机B款所拍摄的一组图像经预处理后可达到的精度。
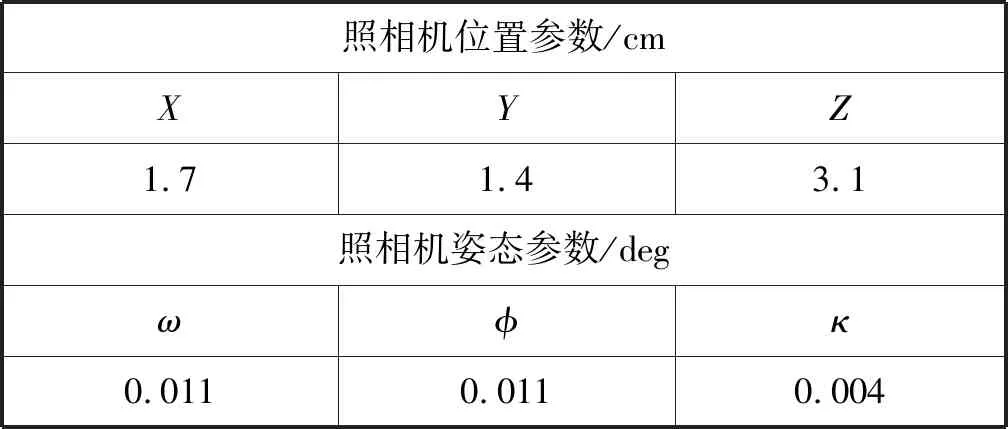
表2 优化后照相机成像位置和姿态精度
参考前述有关解析度的讨论,优化后的成像参数已经接近一个像素精度。
2.3 从图像中提取输电线
已经发表的从图像中提取输电线的研究结果很多,因为拍摄的输电线近似于直线,可以用直线提取法将获取的每幅图像中的输电线像素提取出来[10]。提取后的结果为二进制图像,即每个像素用一个二进制位表示,如1表示代表导线点,0代表背景。
2.4 立方体网格点再投影,筛选出输电线空间点
有了前面几步的结果,就可以开始分析计算输电线像点在实体空间的坐标了。目前多数研究都以将图像点坐标转换至空间点坐标为方向,再将离散的空间点通过插值或抛物线方程还原的方式建立输电线的空间坐标。有别于此,本文讨论另一种建模方法,即沿输电线延伸方向,建立一个包络输电线在内虚拟的立方网格点阵(如图2所示),将点阵中每个点在实体空间坐标通过式(1)重投影至提取的输电线二进制图像中。理想情况下,位于输电线上的虚拟点投影点应落在二进制图中的输电线上,这样就把目标点筛选出来了,如此依次进行下去,当这个点阵中每一个点都完成投影后,所有被筛选出来的点位就构成了输电线空间点位集合。
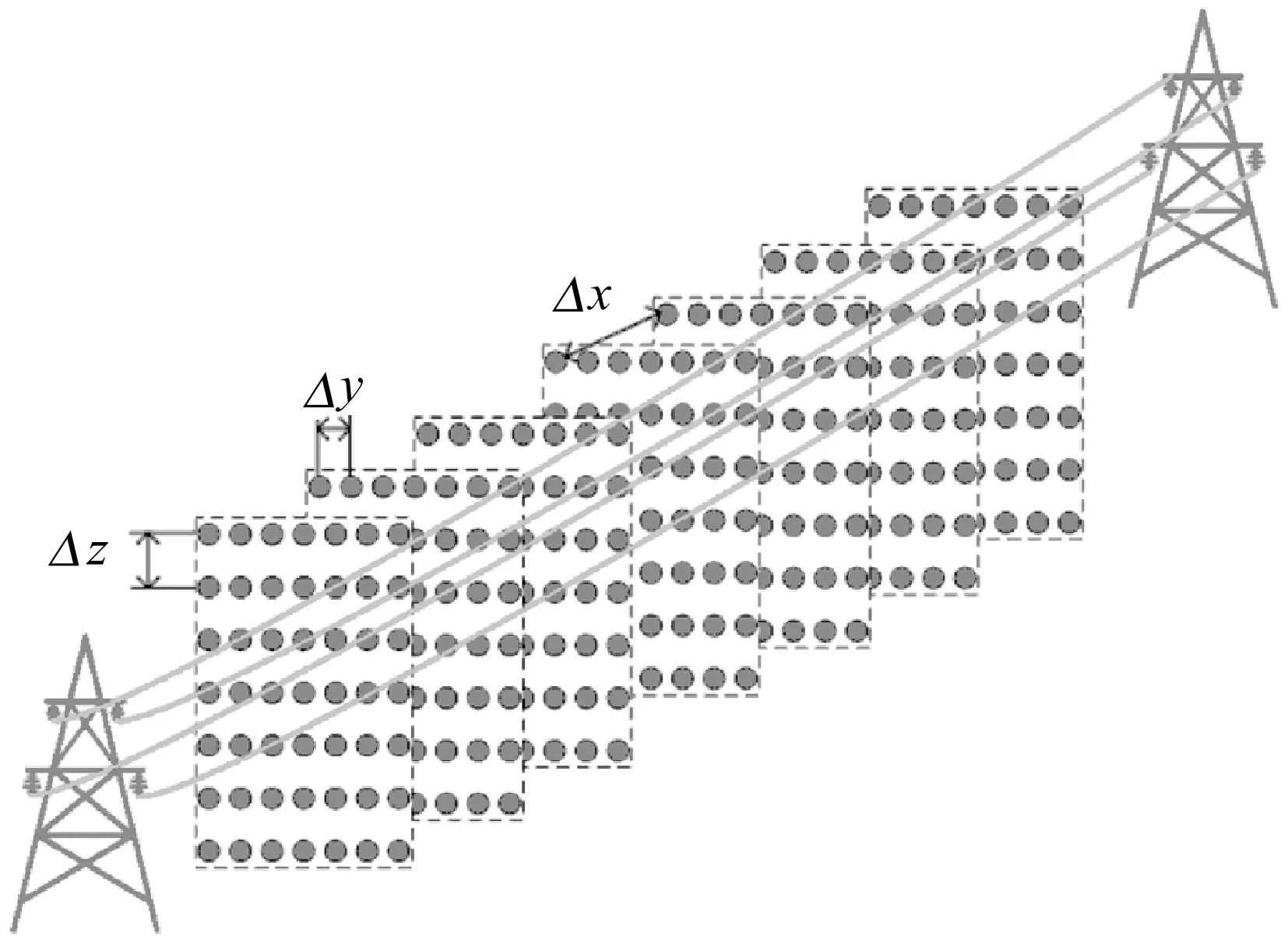
图2 立方网格点阵
由于原始图线中背景等因素的影响,前述步骤中提取的输电线可能是不完整或者存在错误的,为了降低因此而引入的差错,我们在筛选时采取冗余判定方法,即增加目标二进制提取图的数量,将每个虚拟网格点向每张提取图投影,判断是否为目标点,并设定一个阈值,只有满足这个阈值的点才被选中。这样可以提高筛选的准确度,这也是在航拍时需要适当多获取图像的原因之一。
立方体虚拟网格的间距取值大小关系到实际计算量。如图2所示,基于无人机飞行方向,拍摄时实体空间三个坐标轴方向误差程度是不一样的,其间隔Δx、Δy、Δz的取值也应有所区别,图示输电线延伸方向的间隔Δx一般可以取值在1米以内,而Δy、Δz的取值则应与拍摄的图像解析度相当(本例中2~3 cm)。网格点阵过于稠密测量计算量很大但对提高精确度并无实际意义,但过于稀疏则会丢失有效信息,测量精确度下降。
完成了输电线空间点位筛选,用抛物线方程内插建立输电线实体空间模型,即可计算测量出相应的弧垂值。
3 实测结果和分析
通过对相邻电杆的两条输电线应用本文所列方法测量的结果见表3。
表3 一组输电线弧垂测量结果 m
表3中,在测量中选用间距不同的立方体网格点阵和图像数筛选阈值。其中,Δx、Δy、Δz:稀疏网格分别为1 m、5 cm、5 cm;稠密网格为0.3 m、2 cm、2 cm(拍摄解析度为1.75~2.2 cm),低匹配阈值使用4幅图像,高匹配阈值为5幅图像。
到实地用无反射全站仪实测同组2根输电线弧垂,均方根差值见表4。
表4 计算与现场实测的均方根差值 cm
从实测结果看,对弧垂的测量误差已经在3~6 cm的范围内,而业界对测量精度的典型要求一般为误差在20 cm以内。改变立方体网格间距,没有对最终的测试误差有明显影响,而图像数量匹配阈值的增加,减少了输电线匹配点的筛选数量,但能提高插值精度。本文所用实例的取值,已经使测试结果的误差被控制到接近理论误差(照片解析度)。
4 结 语
本文结合航拍技术和图像处理技术,提出了一种基于多角度拍摄照片的输电线弧垂测量方法,在图像预处理时使用了光束平差法对照相参数进行了优化,大大降低了因航拍器抖动、传感器和照相机精度不足而可能造成的失真;在输电线数据提取时,使用了从实体空间-图像空间投影筛选的方法,并选用不同照片数作为筛选阈值进一步降低误差,不同于常用的从图像空间-实体空间建模的方法。最终得到实测误差只有数厘米,满足输电线弧垂监测要求,而采用的测量设备为成本很低消费级无人机,测量方法适用于复杂地理环境,因而有较高的实际价值。
