一种两点间直线搜索的输电线检测方法
2019-03-19,,,,
, ,,,
(1.国网浙江杭州市供电公司,杭州 310000;2.国网浙江杭州市余杭区供电有限公司,杭州 310000)
0 引言
输电线路巡检是保证输电可靠性和防止电力安全事故发生的重要措施之一。在过去,依赖于巡检员定期巡检,这是项劳动密集型的工作,耗费大量的人力物力。现如今,无人机技术快速发展,文献[1-5]提出了无人机巡检方案。通过搭载光学设备的无人机获取输电线路的图像,然后对图像进行处理完成巡检工作。输电线检测是图像处理至关重要的环节,只有准确的检测出输电线,才能进一步分析和诊断输电线是否发生破损、断股等故障。
许多现有的直线检测方法都已广泛应用于无人机图像的输电线检测。例如:基于幅度、梯度方向[6-7],投票策略[8-9],直线支持区域[10],区域生长和链码[11]等。经典的直线检测过程是在应用直线检测方法之前对图像作一个分割处理。Canny滤波[12]是非常好的边缘检测方法,常常和其他直线检测方法一起使用。Hough变换是传统的直线检测方法,可在强对比度和分割良好的图像中检测出直线。文献[13]的方法是结合脉冲耦合神经网络去除背景和聚类的方法检测直线。在文献[14]中,提出了一种基于Hough变换的Kalman滤波器的输电线检测方法,该方法采用了OSTU阈值法,比PCNN算法[15]获得更好的检测效果。此外,还有许多在梯度提取阶段获取图像中相应变化的直线检测方法,这些方法往往都类似于Prewitt,Sobel和Scharr等。
目前已经提出了很多比Hough变换更准确、更快的方法。例如,文献[10]提出了一种基于梯度信息和线支持区域的直线检测方法。又如LSD算法,使用了区域生长法和考虑错误警报[16]的直线检测方法,该方法与Hough变换相比可以获得更高的精度,然而速度却要慢很多。文献[17]所提出的EDLines也是一种很好的直线检测方法,该方法是文献[18]所提ED方法的改进,通过快速边缘检测和最小二乘直线拟合来进行直线检测,可以达到和LSD差不多的准确度,并且速度可以快很多。
在计算机图形学领域,目前也已经提出很多绘制直线和圆的算法,例如,Bresenham直线和中值点,但它们与直线检测过程没有关联。而且,目前还有学者研究直线特征的位置估计和映射[19],通过约束Hough变换和扩展卡尔曼滤波方法来估计直线位置。
结合前辈们的研究结果,本文通过研究,主要贡献如下:
1)提出一种两点间直线搜索的输电线检测方法。该方法是一种基于图像几何关系的新的直线检测方法。
2)通过分析得出一组基于格式塔原理的特征,并利用该组特征实现相邻直线段的连接,为检测更长的输电线提供便利。
1 图像处理
1.1 Canny滤波
Canny滤波是由John F. Canny提出,其主要思想是利用梯度变化寻找出图像灰度强度变化最强的位置。
其主要步骤是:首先,使用高斯低通滤波器对输电线图像滤波,达到平滑降噪的目的。然后,计算输电线图像的梯度大小和方向,并用非极大值抑制方法抑制梯度幅值。最后,采用高低阈值消除伪边缘和边缘连接。
其优点是可以在分割过程中只需要很短的计算时间。然而它有以下两大缺点:在用于检测输电线那样的小器件时,会在同一输电线两侧检测出两个边缘,造成干扰;它使用的是双阈值,且阈值没有自适应能力,针对每一张图像都需要进行繁琐得人工调参,显然不合适。
1.2 方向可控滤波
方向可控滤波是由Freeman[20]提出,其主要思想任意方向的滤波器都可由一组基滤波器的线性组合构成。可实现对图像不同角度的滤波,从而获得更多的能量点,准确检测出图像中物体的边缘。
例如可选用二维高斯函数作为核函数,构建方向可控滤波。
上式为笛卡尔坐标系x,y下的二维高斯函数,σ是依赖于线宽的标准差[21]。
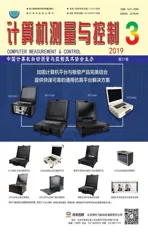
如图1所示,它是通过对二维高斯函数求一阶偏导数得到Gx和Gy,将其作为基函数;同时引入方向偏差参数θ,根据以下规则进行线性组合。
G(x,y:θ)=cos(θ)Gx+sin(θ)Gy
选用3种不同角度所得的滤波效果图。
如图2所示,它是高斯导数通过希尔伯特变换策略得到的3种方向的滤波效果图。
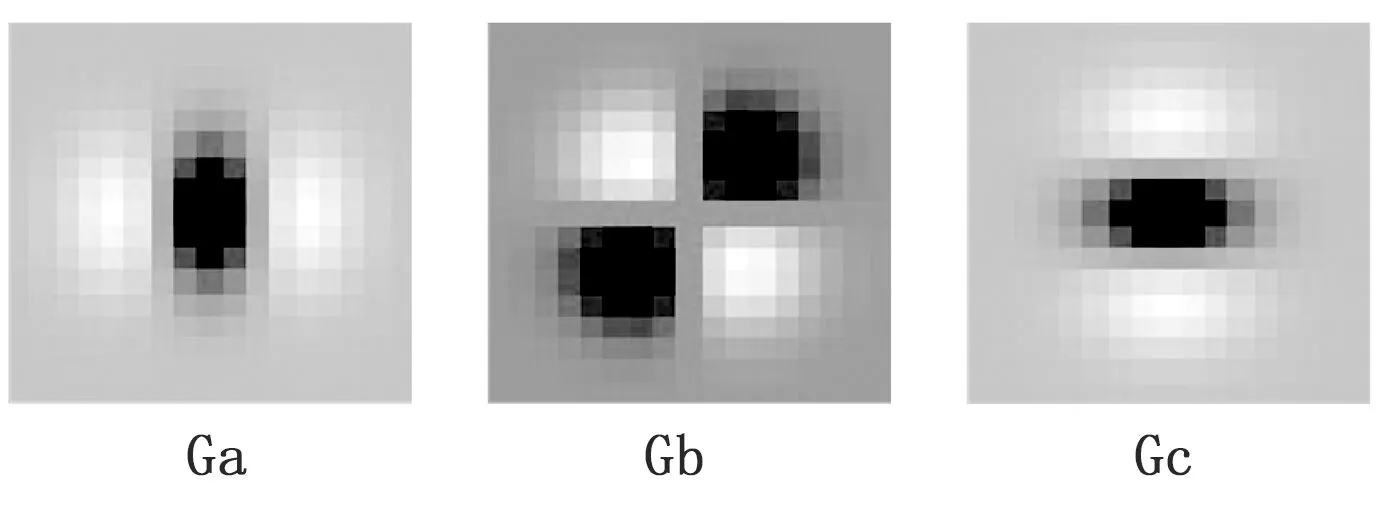
图1 滤波器G2
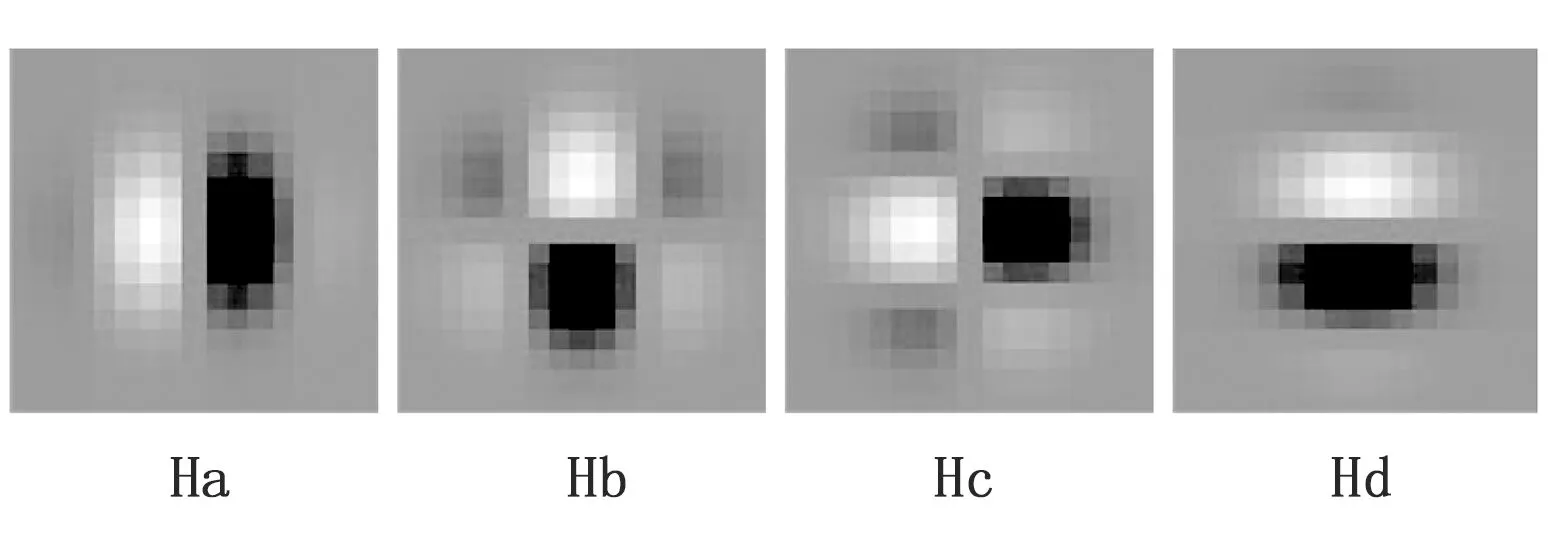
图2 滤波器H2
2 基于圆的搜索
大多数直线检测的图像处理方法都是基于卷积核(滤波)或者邻域操作(连接连通域)。然而,针对基于局部搜索的直线检测方法,执行从直线上某一像素点开始的扩展搜索会比八邻域搜索更有用。计算机图形学算法广泛应用于修改原图以在较大邻域执行扩展比较,并可以验证直线检测中的错误点。在基于圆对称性的分割图像中,栅格圆算法被用于搜索和验证像素点是否属于图像中的某条直线。Bresenham算法[22]用于创建以像素点为单位的圆的轮廓,如图3所示,不同大小的圆轮廓实例。
图3 不同大小的栅格圆
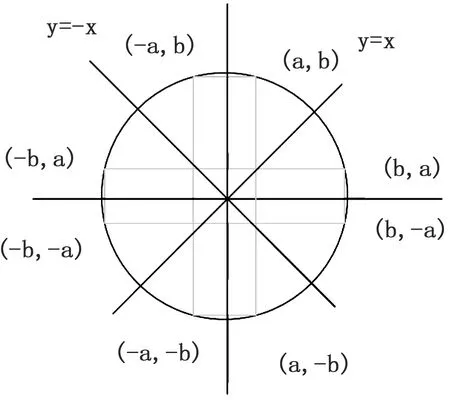
图4 八分圆对称性
此外,该对称性可以用于检测两个相对的点是否属于来源于中心轴(xc,yc)的直线。该算法首先在方向可控滤波后分割的图像中,验证所有可能的对称对(xc+x,yc+y)和(xc-x,yc-y)是否与背景不同。然后,在每条被搜索的直线方向上选择更多的点进行验证它是否属于该直线。
2.1 CBS直线检测
该算法可以检测直线的有效点。如图5所示,若可以在搜索圆内找到属于同一直线的两个等距点,则该搜索圆的圆心就被定义为有效点。通过画圆算法可以检测直线的有效点。
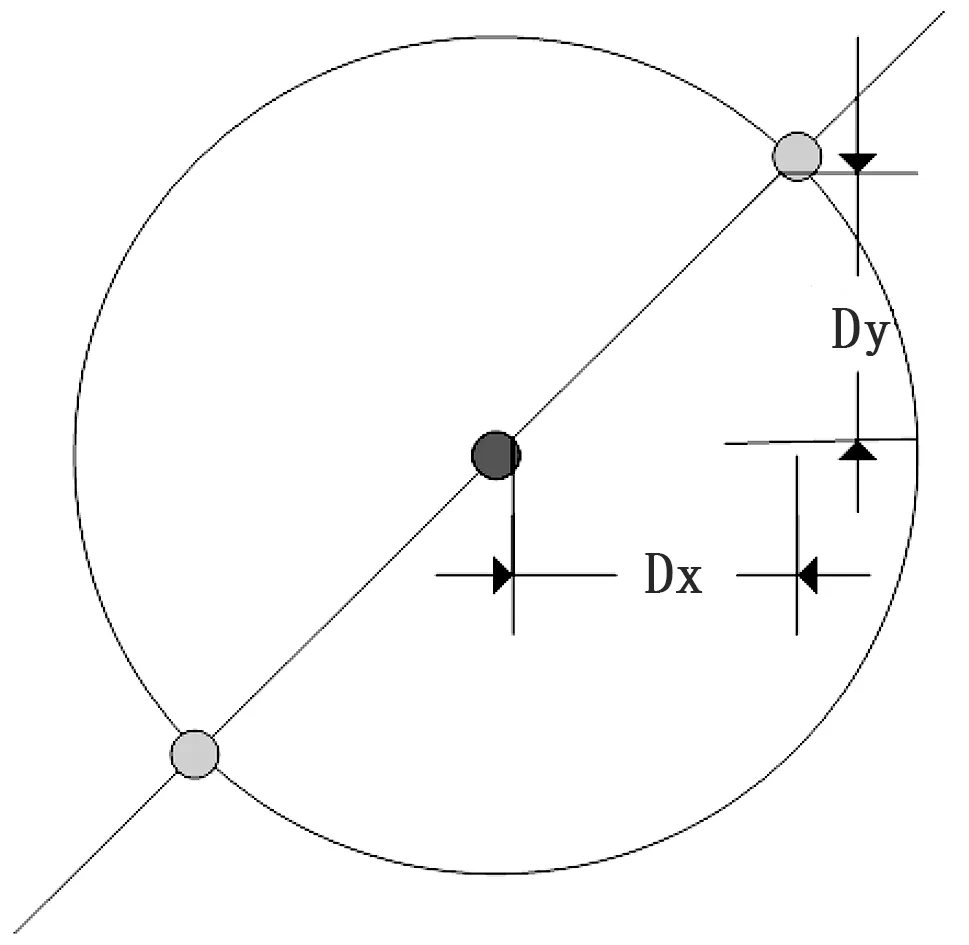
图5 有效点
如图6所示是一些不同角度的情况,其精度依赖于圆半径的选择。因此,这就需要足够长的半径来在网格中画圆,如图3所示是不同像素半径所画的圆。
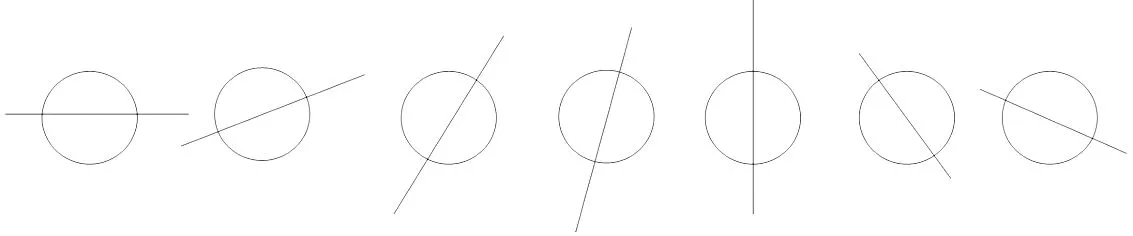
图6 不同方向
该算法包含以下步骤:
1)使用方向可控滤波器对图像进行分割。
2)使用分割所得的与背景无关图像的所有像素点进行以下操作:
(1)通过画圆算法搜索有效点。
(2)如图5所示,若是有效点,可以得到Dx和Dy。
(3)如图7所示,根据Dx和Dy的值,沿着对称方向移动。
(4)如果点(x,y)是有效点,将其移动到点(x+skip·Dx,y+skip·Dy),继续搜索有效点,直至搜索不到。
(5)保存第一个和最后一个有效点。
(6)画出介于第一个有效点和最后一个有效点之间的直线段。
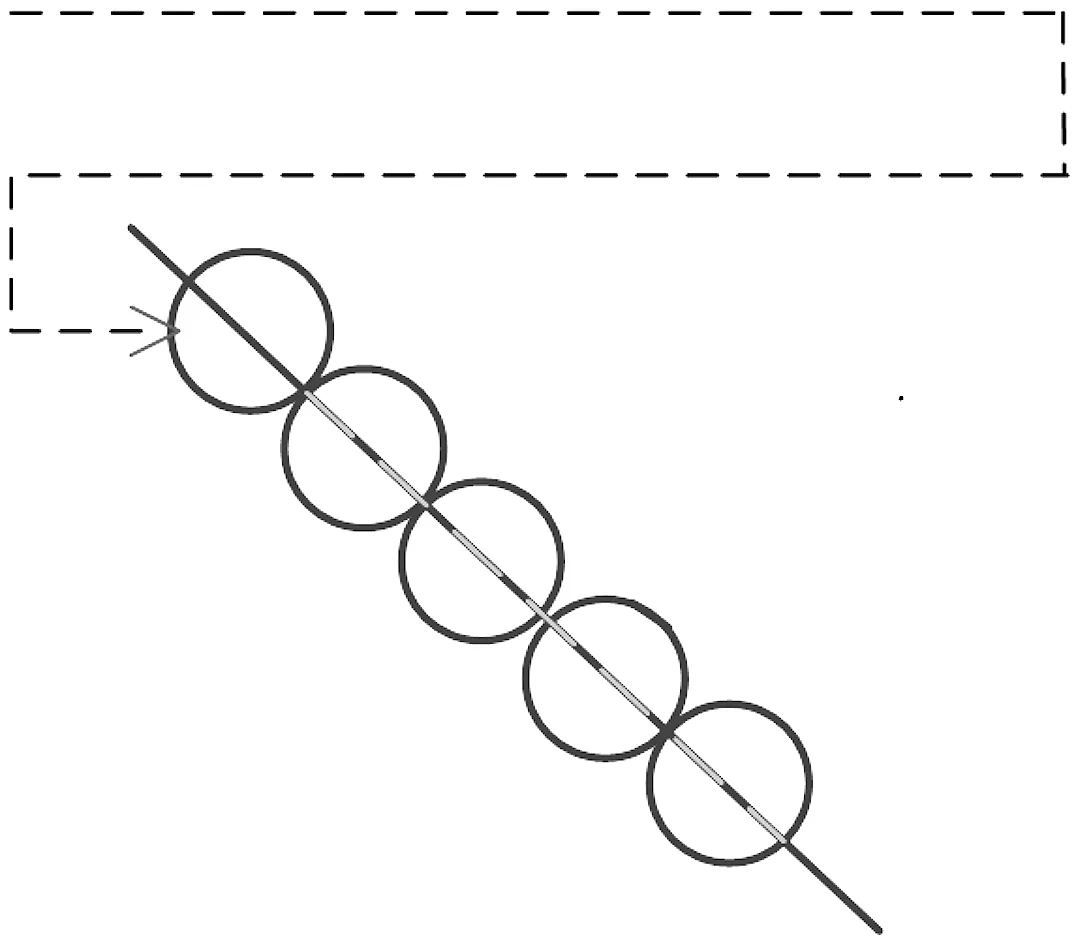
图7 CBS处理过程
该算法相应的伪代码下:
Data: x, y, r, rend, skip, pos, Image
Resulit: Line list[]
1 p = pos;
2 while r < rend do
3 rend current;
4 if ValidPoint(M, x, y, r, Dx, Dy, skip) then
5 if abs(Dx) > abs(Dy) then
6 steps = abs(Dx);
7 else
8 steps = abs(Dy);
9 end
10 incX = Dy / steps;
11 incY = Dx / steps;
12 xi = x - Dx;
13 yi = y - Dy;
14 while NextCircle(M, x, y, Dx, Dy) > N do
15 x += Dx * skip;
16 y += Dy * skip;
17 k++;
18 end
19 xf = x;
20 yf = y;
21 for i from 1 to k do
22 // Erase line
23 Image[x][y] = 0;
24 end
25 end
26 list[p].x0 = yf;
27 list[p].y0 = xf;
28 list[p].xf = yi;
29 list[p].yf = xi;
30 p++;
31 end
该算法关键参数说明如下:
半径r:搜索圆的半径,该值取决于所检测直线的长度和图像的大小。随着圆的半径的增大,可以允许更多的可能性来估计直线的角度和定义更精确的对称点。
步长skip:一个有效点到另一个有效点的增量,该值起到控制检测速度和精度的作用。值越大,检测速度越快,然而检测精度越低。经过试验,在保障精度的条件下,该值最大可以取到接近搜索圆的半径。
2.2 直线段连接
根据文献[23],存在一组基于格式塔原理的特征,这些特征可以判定一个直线段是否与另一个直线段相邻,并且可以连接形成更长的直线段。
本文主要使用以下特点:
1)相似度:由于输电线通常是图像中近似平行的几条直线,故而它们应具有相似的斜率。
2)长度:由于输电线通常是图像中较长的直线段,故而优先处理较长的直线段。
3)近似性:通过计算两条直线段的各个点之间的欧式距离来判定,若两条直线段足够接近并且相似,则可以将其替代为一条直线,从而减少冗余信息。
经过连接算法处理后,可以得到一组检测到的直线段,每条直线段用初始点坐标(xi,yi)和结束点坐标(xf,yf)表示。
3 实验仿真结果
首先,在人造图像上进行实验,探究搜索半径对CBS直线检测性能的影响,以及验证基于格式塔原理的特征的直线连接方法的有效性。然后,在无人机巡线的真实图像进行实验,验证本文算法的有效性,最后在较大量的无人机巡线图像上实验,验证其性能。实验所用软件环境为Ubuntu16.04,硬件环境为i7-7700K处理器,16 G内存。
3.1 人造图像实验
本组实验,选用2张人造图像,分别采用半径参数为5,10,20对图像进行CBS直线检测。检测效果如图8所示。通过观察可以看到:在半径为5时,检测结果中均存在很多的邻接线;而在随着半径增加,邻接线越来越少,检测的准确度越来越高。所以可以得出结论:半径参数较小时,不能获得良好的检测结果,需要足够大时,才能获得较好的检测效果。
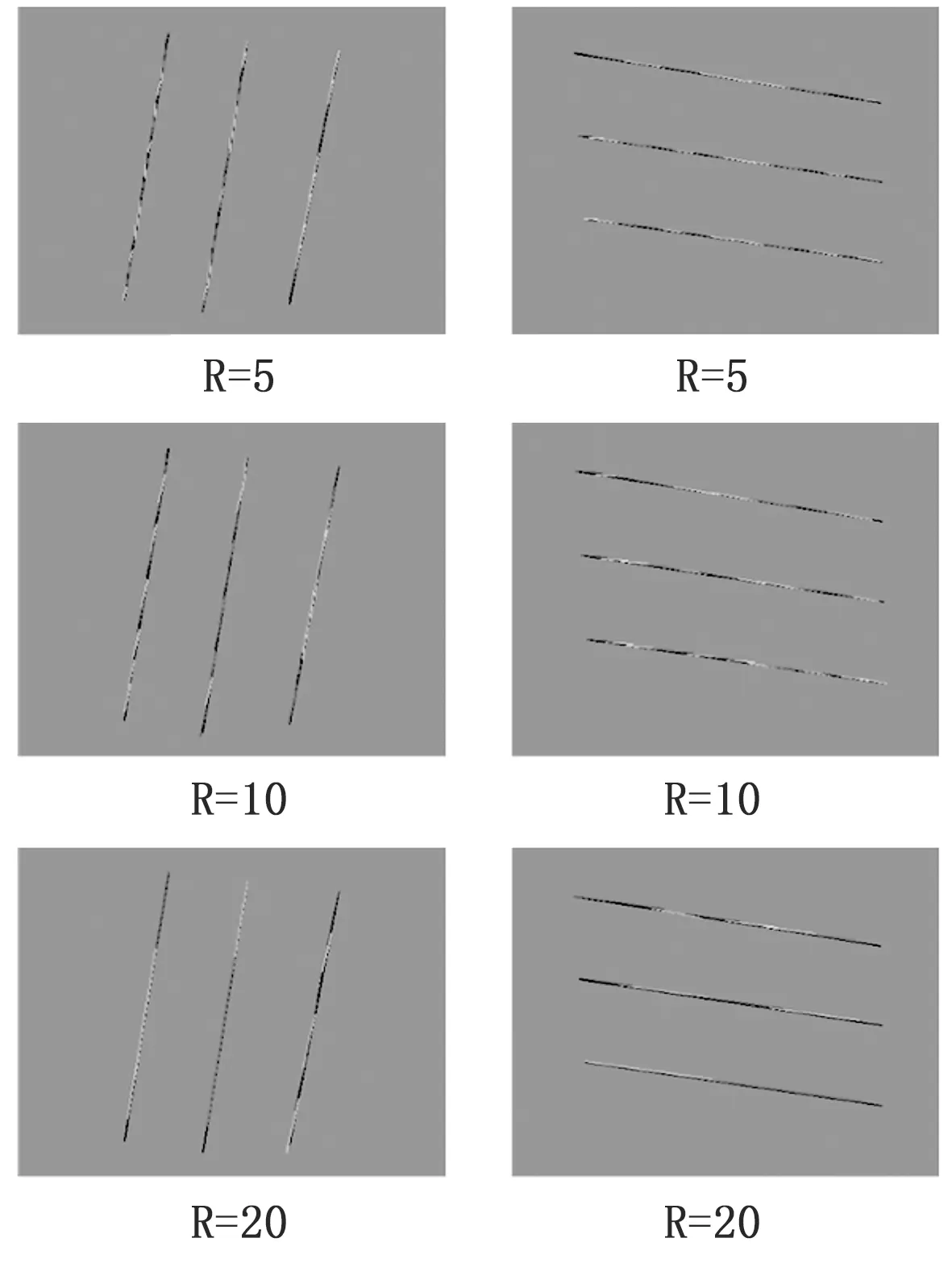
图8 不同半径的人造图检测效果
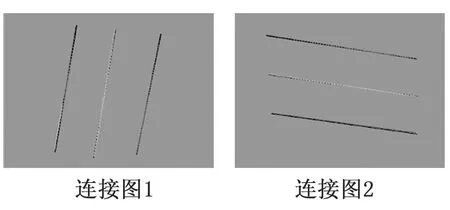
图9 连接效果图
选用CBS直线检测最佳的结果(即半径为20时),使用本文直线连接方法进行直线段连接,所得实验结果如图9所示。将其与连接前的结果进行对比,显然可以发现,经过连接算法处理,可以连接大部分的邻近直线段,可以进一步提高检测性能。
3.2 无人机巡线图像上算法有效性实验
本组实验,选用无人机巡线的图像进行实验。如图10所示,进行方向可控滤波器分割后,不同半径的CBS直线检测效果图。从图10中可以看到,半径参数较小时,不能获得良好的输电线检测结果,半径较大时,获得了较好的检测效果,与人造图像上所得结论相吻合。故而,选用半径为20时的CBS直线检测结果进行直线段连接。从图10中直线连接前后的效果图对比可以看出,直线连接处理依旧有效,可以进一步提高输电检测性能。

图10 无人机图像
3.3 无人机巡线图像上算法性能实验
本组实验,选取121张无人机巡线图像,共含输电线298根,分别使用本文算法和Hough变换方法进行实验。实验结果如表1所示。

表1 两种算法实验结果表
从表1中可以看到,在121张无人机巡线图像的298根输电线中,本文算法可以检测出256根,检测准确率高达85.9%,比Hough变换法高出21.1%。并且本文算法只误检27根输电线,误检率低至9.1%,比Hough变换方法低11.4%。可见,本文算法在无人机巡线图像的输电线检测任务中,具有较高准确率和较低误检率的优点。
4 结论
本文所提出的两点间直线搜索的输电线检测方法:首先,通过方向可控滤波器对无人机图像进行分割。然后,通过所提出的CBS直线段检测方法进行直线段检测。最后,通过所提出的基于格式塔原理的特征的直线连接方法进行直线段连接。
通过在人造图像上的实验可知: CBS直线检测方法中,半径参数需要足够大时,才能获得较好的检测效果;基于格式塔原理的特征的直线连接方法可以进一步提高检测性能。
随后,在无人机巡线的真实图像上进行实验,验证了本文算法可以应用在无人机图像的输电线检测任务中,并且和人造图像具有相一致的规律。
最后,通过在较大量的无人机巡线图像上进行实验,并与Hough变换法进行对比。从检测准确率和误检率两个层面进行评价。可知:本文算法具有较高的检测准确率和较低的误检率的优点。