自适应机器人手的研究现状与展望
2019-03-13苑航
苑航
(洛阳市第一高级中学,清华大学天津高端装备研究院洛阳先进制造产业研发基地众创空间,河南 洛阳 471000)
机器人手(或称为抓持器)与人手相似,机器人能够完成许多任务有赖于一双能够抓取多种物体的末端抓持器。通用抓持器在机器人领域中有广泛的用途,可将机器人与物体临时连接起来,在适当的时候能够释放,是机器人与外界交互的重要终端,在工业自动化领域中有广泛用途。
在抓持器研究领域,除了工业夹持器之外,研究较多的有仿人机器人手、仿生机器人手、自适应欠驱动机器人手三类,它们各有优缺点。
1 机器人手的发展概况
1.1 仿人机器人手
美、日、德、英、加拿大等发达国家和我国的高校与科研院所积极研制机器人手,其中,有模仿人手的机器人手,将其设计为具有更多的手指,且手指上具有若干关节。比如UTAH/MIT 手[1]、Salisbury 手[2]、Gifu-III手[3]、Robonaut R2手[4]、Shadow 手[5]、DLR/HITHand[6]、BH-III手等。此外上海交大、华中科大、北理工、中科院等机构均对此开展了深入研究。Shadow手如图1所示。
灵巧手的传感控制非常复杂,制造和维护成本高昂,抓取不同形状尺寸的物体均需要实时检测与抓取规划,影响其的广泛使用,目前仍然停留在实验室研究使用阶段。
Shadow灵巧手具有5个手指,主要材料采用聚甲醛塑料和铝合金,通过CANBUS/EtherCAT母线进行位置和力的控制。该手的关节自由度多达22个(不含腕部2个自由度),该手采用了藏入前臂中的22套空气肌肉、阀组和电机来驱动控制每个关节的灵巧动作。因为该手结构过于复杂,成本很高,因此价格非常昂贵,目前还很难大量应用。
哈尔滨工业大学与德国宇航中心联合研制了DLR/HIT-I手、DLR/HIT-II手[6]两代灵巧手,如图2所示。每个手指均藏入了控制器DSP和控制器FPGA,手掌中是一块FPGA,控制时需要用上位机电脑进行操控,相当复杂。
在抓取中,由于物体形状各异,如果利用多指手以合适构型抓取该物体,势必会造成实时检测与规划手部各关节转角位置的困难,因而多指机器人灵巧手的使用难度大,实时传感与控制方法目前还不能低价实现,因此灵巧手的应用遇到了瓶颈。

图 1 Shadow 手

图 2 DLR/HIT-I手、DLR/HIT-II手
1.2 仿生机器人手
机器人不一定是人的形状,机器人手也不一定按照人手的形状来设计。机器人手的作用是实现抓取,上述的多指灵巧手是研发机器人的一种“捷径”——模仿人手,此外还有多种方式,只要能够达到抓取物体的效果即可。例如模仿生物的“手”——不同的动物与外界交互和接触物体的部件都可以看做是该动物的“手”,因此从生物中获得灵感就可以诞生具有仿生学意义的仿生机器人手,也称为特种机器人手。北京航空航天大学与德国Festo公司联合研制了一种仿章鱼触手,如图3所示。该仿章鱼触手模仿了生物的柔性,适合抓取圆柱状物体,对于其他异形物体的抓取能力有限。Festo公司研制的模仿蜥蜴舌头的抓持器如图4所示。此抓持器采用水作为介质,利用气力作为驱动源,将弹性薄膜和内部的活塞、弹簧等结合起来综合实现了一种具有吸盘效果和被动手指生成效果相叠加的新型通用抓持器。该抓持器适合抓持较小高度的物体和平板物体,但是对于尖锐和高度较大的物体抓取效果受变形程度的限制而无能为力,同时抓取力量偏小,此外,抓取存在延时、抓取效率低、噪声较大、能耗较高问题。
1.3 自适应欠驱动机器人手
随着科技的发展,欠驱动手应运而生。欠驱动手是采用少量电机驱动多个关节,其中能够实现自适应抓取的称为自适应欠驱动手,近十年来受到很多研究学者的青睐,已经开发出来一些新型欠驱动手,平夹自适应手是其中的佼佼者。目前缺少衡量机器人手的统一定量比较标准,一般按照抓取物体种类、抓取物体动作过程与结果(抓取方式)、抓取适用情况、抓取装置的设计、制造与维护成本、抓取装置的弱点或不足等多个方面综合进行比较。
Robotiq公司是知名的欠驱动机器人手公司,开发的平夹自适应手如图5所示[7]。平夹自适应手的核心是将平夹与自适应两种人手非常常用的抓取模式复合起来。该手仅有两个手指,也只能一次抓取一个物体,也很难同时抓取不同方向杂乱摆放在包装箱内的物体。

图3 仿章鱼触手

图4 仿蜥蜴舌头手

图5 Robotiq手
2 自适应通用抓持器的研究现状
2.1 Mason抓持器
由于抓取物体的多样性,抓取原理与方式变化莫测,因此产生了众多抓持器。为了抓取杂乱摆放的物体且一次抓多个物体,卡内基·梅隆大学Mason教授团队研制了看似非常简单,但是效果很好的抓持器,如图6所示。该抓持器仅有3个手指,每个手指的中部没有关节,仅仅在手指与手掌之间存在关节。实验证明该抓持器控制简单,一次能抓取多个杂乱摆放的物体。其不足之处在于刚性手指对表面摩擦力小、自重大的物体抓取困难。
2.2 Scott抓持器
1985年,英国帝国理工大学Scott教授团队研制了一种伸缩管自适应通用抓持器Omnigripper[8],简称Scott抓持器,如图7所示。该夹持器具有两组伸缩管阵列,每根杆相互平行,由物体推动长杆来适应物体形状,液压驱动两组伸缩管合拢或分离,实现物体抓取。其不足之处在于:①抓持具有方向性,无法做到多向抓持。该装置对目标物体施加抓取力时,只能沿着两组伸缩管合拢的方向。②对于超过宽度的长条物体不能抓取。当目标物体的长度方向与抓持方向一致且目标物体长度超过该装置的宽度,目标物体不会因两组伸缩杆合拢而受到抓持力。
2.3 滑管阵列与伯努利吸盘复合抓持器
2010年,瑞典学者研制了伸缩杆阵列与伯努利吸盘复合抓持器[9],如图8所示,成功从二维伯努利吸盘升级为三维伯努利吸盘。利用伸缩杆来适应物体的形状,并利用伯努利方法吹气产生局部负压把物体吸住。由于增加了伸缩杆阵列,使得原来仅能用于平面物体吸取的伯努利负压吸盘抓持器变为三维物体光滑表面均可以吸取,其不足在于仅能抓取表面光滑的物体。
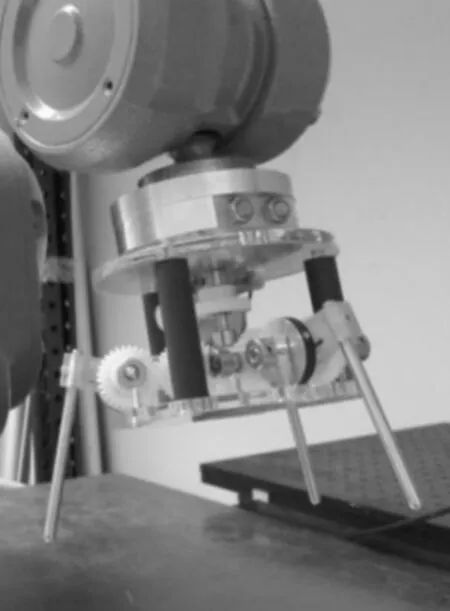
图 6 Mason 抓持器
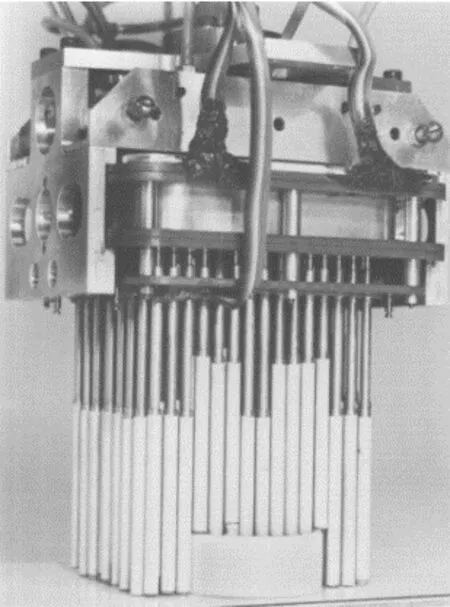
图 7 Scott抓持器
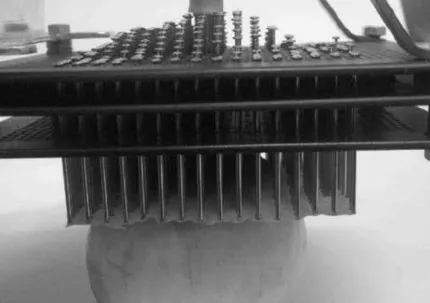
图8 伸缩管阵列与伯努利吸盘复合抓持器
3 结语
传统机器人手模仿人手设计为多指装置,它们能够抓取多种物体,但是结构复杂、控制程序烦琐和成本昂贵。没有手指的特种手如吸盘手适应范围相当有限。一般的通用抓持器为了降低成本而被制作成具有两个相对运动的部分,以便最简单地实现抓取和释放功能。这种方式结构简单,成本低,能够较好抓取某种形状物体,但是不能较好适应更多形状物体,适应性不高。本文总结了国内外自适应通用抓持器的研究成果分析及其特点和不足,从而推断出增加手爪的适应能力成为一个突出的问题。机器人手爪未来发展趋势如下:①手爪小型化、轻量化,而抓重大幅增长;②自适应抓取不同形状尺寸物体的能力提高,抓取稳定、成功率高;③能够对多个物体同时进行抓取,具有良好的适应性;④结构简单,成本低;⑤控制容易,抓取时对物体形状尺寸检测、抓取规划控制难度降低。
