基于整车E/E架构功能分配的方法研究
2019-02-14李玮
李 玮
(中国第一汽车集团有限公司 智能网联开发院,长春 130011)
主题词:E/E架构 功能分配 方法
1 E/E架构
E/E(Electrical/Electronics)架构是整车电子电气功能的总体布置,是整车各电子电气系统间的总体规划、协调和平衡,是基于全局的整车电子电气总体开发[1]。E/E架构的设计内容包括功能需求分析、功能定义、功能分配、网络通讯和线束拓扑、功能安全等方面的内容。随着电子技术、通迅技术、控测感知等技术的成熟,汽车进入了“有人驾驶”和“无人驾驶”的过渡期,尤其是近年互联控制、互联共享以及互联驾驶在汽车行业的兴起,汽车研发也从“人-车-路”的闭环研究向“智能-车-路”的闭环研究转换。无人驾驶车辆的研发在不断的试错中积累经验并不断完善,也是新功能逐渐增加或合并的过程,新功能的增加必然导致架构设计的复杂性或多样化。功能分配是架构设计中的关键环节,功能分配的合理性直接影响整车的成本、开发质量和开发进度。
功能分配主要有两种情况:一是建立全新平台架构的功能分配;二是在现有的架构平台上增加新功能的功能再分配。第一种情况是整车架构平台更新换代时使用,而在现实的架构设计中第二种情况时有发生,而且对全新设计也不失通用性和适用性。本文重点论述如何在现有的架构上增加新功能的分配方法。
2 功能分配
2.1 功能分配的前提
功能分配是架构设计的中间步骤,功能分配设计须具备一定的前提条件才能进行。E/E架构设计始于功能需求。基于PREEvision工具的开发过程,功能需求可转化为整车E/E功能列表后导入PREEvision系统,根据功能列表,制定每条功能的功能规范。功能规范涉及到功能的具体定义以及实现功能所需的相关的输入输出条件。功能的逻辑架构是以功能规范为基础设计的功能模型,功能分配是将不同的功能模型映射到控制模块的过程。功能分配是架构设计中的一个关键步骤,通过功能分配,导出最终的架构设计方案,形成网络拓扑,输出最终的系统方案。本文重点讨论功能分配的分析过程。如图1是功能分配设计过程图(其中虚框内为功能分配过程)。功能分配的前提条件是各功能的功能规范以及逻辑模型等。

图1 功能分配设计流程
2.2 功能分配的方法
在现有的架构上增加新功能时,关键是在实现功能要求的情况下,传感部件和执行部件优先考虑利用原车现有资源,对控制部分尽可能避免增加额外的控制单元,最理想的当然是只增加新软件而不增加硬件的成本。原则上还要考虑线束的布局,整车功能的不同配置等因素。要达到这种目的,首先需要充分了解现有的架构形式,图2是目前典型的架构形式。

图2 典型的汽车E/E架构[2]
汽车E/E架构目前是分成不同的域,比如动力域、底盘域、信息娱乐域、自动驾驶域等等。图2是为说明下面的例子只标出相应的几条总线。新功能增加主要考虑以下几点:
(1)现有E/E架构不能有改变;
(2)在增加新功能后,所有总线负载不能超过阈值(比如55%);
(3)新功能增加导致不同CAN总线上的帧的延迟不能超过每个帧的最大限值[3](比如100 ms);
(4)新功能的执行时间不能超过功能规范要求的最大值(比如2 000 ms);
(5)控制器的负荷不能超过其硬件处理的最大能力。
以智能远光功能为例说明在现有架构上增加新功能的分析方法。根据功能规范、智能远光功能的接口由5个输入功能和2个输出功能组成,如图3所示。
按照功能规范,智能远光功能的输入1是设置整个系统的开启与关闭的选项,这个通常是在主机屏幕上进行设置;输入2是指灯光开关的状态,表明灯光开关是处于自动挡,且是非人为的远光行为;输入3是环境识别,包括本车道是否有车、对面车道是否有来车、路灯识别以及是否有雾的识别;输入4是识别白天和夜晚,当然只有在夜晚才存在是否点亮远光的状况;输入5是车速的识别,只有车速大于一定限值时才能开启智能远光的功能。所有的输入条件输入到控制模块,经过控制模块的逻辑判断后给出两个输出。输出1是控制远光的点亮与熄灭,输出2是显示智能远光的工作状态。

图3 输入输出功能接口
从以上功能描述可知,输入与输出都是原车上现有的部件和已具备的条件,但是如何映射到逻辑模块中进行重新分配而实现一个新的功能。在做功能分配时往往是将逻辑模块再分到更细的子功能模块,由不同的映射结果得出不同的分配方案。
2.3 功能分配方案
以上实例是在现有的架构中增加新的功能,因此原架构的状态是已知的,包括整车控制器的数量、各控制器的负荷、总线的通讯速率、总线负载等。对于智能远光功能有很多要求,简化时序约束影响如下:
a)功能从开启设置到响应时间不超过25 ms
b)功能从感知到执行远光灯点亮时间不超过500 ms
由于原架构方案为灯光开关的硬线信号以及白天夜晚的识别信号接入车身控制器(BCM),远光灯的驱动也由BCM来完成,为不增加额外的硬件负荷,以下分配方案中仍保持原架构方案的接口。因此以上智能远光的功能可形成以下4种典型的功能分配方案:

图4 功能分配方案1
功能分配方案1:如图4所示,将输入1、输入2、输入3及输入5分配给BCM,将输入4分配给数据处理及控制模块(MODEL),MODEL将识别到的原始数据处理后,对外发送有车、无车、路灯及雾天的结果信息给BCM,由BCM结合整车的其它输入条件综合判断后,最终决定远光灯的自动点亮或熄灭,以及发送给组合仪表显示自动远光的状态信息。

图5 功能分配方案2
功能分配方案2:如图5所示,将输入1、输入4、输入5分配给MODEL,实现的逻辑是由该模块做判断,将远光点亮或熄灭的结果发送给BCM,由BCM结合输入2和输入3最终决定远光灯点亮或熄灭,以及发送给组合仪表显示自动远光的状态信息。

图6 功能分配方案3
功能分配方案3:如图6所示,BCM将输入2和输入3的信息通过总线发送给MODEL,输入1、输入4、输入5分配给MODEL,由该模块综合判断所有的情况最终决定远光灯的点亮或熄灭,将最终的结果通过总线发送给BCM,由BCM驱动远光灯的点亮或熄灭,以及仪表的远光灯状态指示信息。

图7 功能分配方案4
功能分配方案4:如图7所示,将所有的输入条件都分配给BCM,由BCM接收路面识别的摄像头信息并集成算法,综合判断所有条件后给出最终驱动远光灯的点亮或熄灭,以及仪表的远光灯状态指示信息。
2.4 功能分配分析
按上节的功能分配方案和现有的通用的架构形式可导出如下信息流。其中IN2/IN3/OUT1部分的信号流为原架构中已存在的信息,对该功能分配无影响;IN4/IN1/IN5/OUT2的信息流虽然是由于新增功能而增加的信息流,但对这几种功能分配方案无影响;重点考虑MODEL和BCM的信息流变化情况。
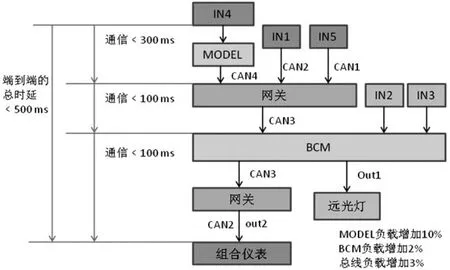
图8 功能分配方案1的信息流
图8 为功能分配方案1的新增功能给控制器带来的负载的增加和通讯时延的示意图。从图8分析来看,端到端的总时延小于500 ms,MODEL的负载增加10%,BCM的负载增加2%;CAN1/CAN2/CAN3/CAN4传输的都是少数的信号,总的总线负载增加3%;该方案满足功能要求和总线负载要求,表明该方案可行。

图9 功能分配方案2的负载和通讯时延
图9为功能分配方案2的新增功能给控制器带来的负载的增加和通讯时延的示意图。从图9分析来看,该方案MODEL的负载增加12%;BCM的负载增加2%;总的总线负载增加3%;端到端的时延小于500 ms,满足功能设计要求,控制器也能承担负载的增加,表明该方案可行。
图10为功能分配方案3的新增功能给控制器带来的负载的增加和通讯时延的示意图。从图10分析来看,所有的输入都发给MODEL,由MODEL做统合各条件进行判断做出输出的决策,因此MODEL控制器负载增加15%;BCM的负载可忽略;总线通讯的负载增加4%;端到端的时延小于500 ms,表明该分配方案可行。

图10 功能分配方案3的负载和通讯时延

图11 功能分配方案4的负载和通讯时延
图11 为功能分配方案4的新增功能给控制器带来的负载的增加和通讯时延的示意图。从图11分析来看,所有的输入条件(有的输入需经过网关)都分配给BCM,由BCM做图象处理,信息综合判断,最终得出支持两个输出。由于原车BCM只做开关量等简单的逻辑判断,新增的图像处理使BCM负载增加50%;整车总线负载增加2%;端到端的通讯时延小于500 ms。该方案已超出BCM控制器的负荷,因此方案不可行。
功能分配设计时不仅要考虑控制器的负载和总线负载,还要考虑端到端的功能延迟、功能分配对成本的影响、整车质量的影响以及扩展性进行分析与比较,见表1。

表1 功能分配方案比较
综上所述,增加新功能的不同的分配方案给控制器和总线都带来一定的负载变化。方案四的BCM负载超出了原有BCM硬件所允许的最大值,势必导致要更换新的BCM,与设计初衷相违背,线束上增加成本高的同轴电缆,布置也较为困难。而其它几个方案基本都能满足功能的要求,但做功能分配设计时还有个考量是相同类似的功能放到一个控制单元中,可简化软件和硬件设计,还要根据各整车厂的平台资源、车型的变型等合理地选配。当然表格中比较数据是为说明分析方法的相对数据,而非实测数据。
2.5 功能分配的评价
以上讨论了功能分配主要考虑的因素,但分配后的结果对整车而言如何进行评价是关键。好的E/E架构设计即能节约成本又能具有良好的扩展性以满足现在用户的个性化需求。对功能分配的评价主要是4个大的方向:
(1)成本:包括ECU的成本、网络通讯的成本、线束布置带来的成本;
(2)性能:包括网络的负载及响应时间、功能端到端的时延、CPU的响应速度;
(3)可扩展性:包括CPU的计算能力、网络的带宽余量、车型从低配到高配的功能可覆盖性;
(4)功能安全:包括满足ISO 26262的安全等级要求[4]。
通过工具来进行各方案的功能分配方案及评价,也要结合不同级别的车型以及产量的大小,达到成本与性能的最优化。
3 结束语
功能分配的方法可是基于PREEvision工具来实现的。通过建立功能模型,到不同的映射体现不同的功能分配结果,并对不同的方案进行时序分析、负载分析、成本分析、可扩展性和功能安全分析,以确保设计之初的方案合理性。这种方法不仅能加速开发过程,而且对不同产品、不同的变型管理之间、功能及功能规范需求之间都有可追溯性,减少后期设计变更[5]。因此说,合理的功能分配是汽车E/E架构设计中重要的环节。