锥形束CT自动化图像QA软件的设计与实现
2019-02-13冯汉升
【作 者】汪 涛 ,冯汉升,李 实,杨 洋
1 中国科学院等离子体物理研究所,合肥市,230031
2 中国科学技术大学,合肥市,230026
0 引言
锥形束CT(Cone Beam Computed Tomography,CBCT)由于其扫描速度快,辐射剂量低,图像几何精度高,易于与放疗设备集成等优点已经被广泛应用于图像引导放射治疗(Image-Guided Radiation Therapy, IGRT)中。通过锥形束CT的图像与计划系统的图像进行配准,获得患者的摆位误差并加以修正,有效地落实了计划靶区剂量,极大提高了放疗的精度[1]。锥形束CT的图像质量直接影响了摆位信息的获取,决定了图像引导放射治疗的精度。所以物理师在使用锥形束CT的过程中,需要定期对锥形束CT进行图像质量保证(Quality Assurance,QA)[2],以保证锥形束CT发挥其作用。
传统的基于图像处理软件选取感兴趣区(Region of Interest,ROI)计算相应数值,通过调节窗宽窗位观察图像,这种QA方式受限于ROI选取的准确性和操作人员的经验[3]。针对在中国广泛使用的美国模体实验室Catphan500模体,本文论述了一种基于Canny算法[4]和Hough变换的自动化锥形束CT图像QA软件的设计。本软件可以自动定位相关组件并提取ROI,快速生成图像QA报告,达到快速准确获取图像QA结果的目的。
1 软件的整体架构
如图1所示,锥形束CT自动化图像QA软件由图像读取模块、模体定位模块、模体分析模块、图像QA报告生成模块组成。图像读取模块用于处理多种格式图像的读入,获取图像的数据,体素大小等图像信息。模体定位模块通过遍历图像的各层,获取模体各个组件所在图像的层数、模体摆放的坐标、模体的偏移角度。模体分析模块根据模体定位模块的结果,对模体的各个组件进行分析,得到图像的HU(Hounsfield Unit)准确性、HU均匀性、空间线性度、MTF(Modulation Transfer Function)分析结果。图像QA报告生成模块根据模体分析模块的结果生成PDF版的图像QA报告。
2 模体定位模块的实现
如图2所示,Catphan500模体由4个直径15 cm不同厚度的组件组成,其中本软件使用了三个组件:CTP401组件(厚度2.5 cm,用于检测图像的HU准确性和空间线性度),CTP528组件(厚度4 cm,用于检测图像分辨率)和CTP486组件(厚度5 cm,用于检测图像的HU均匀性)。
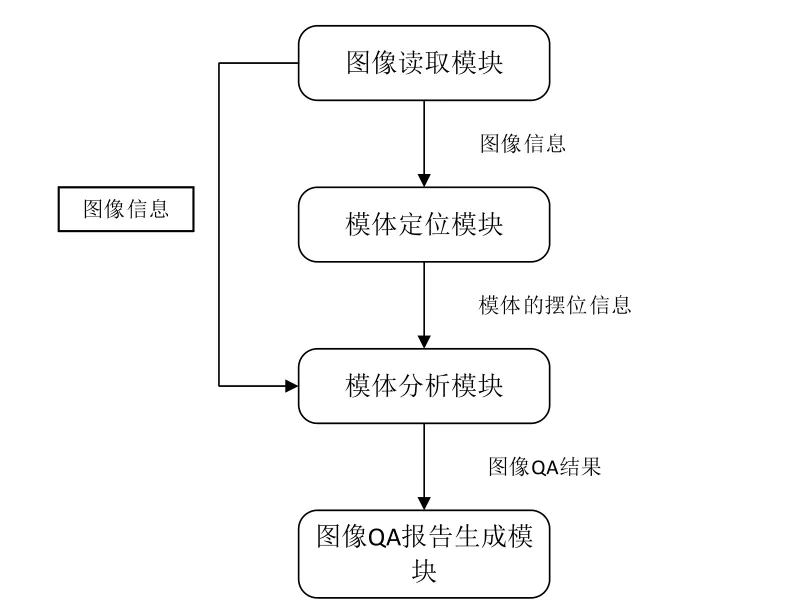
图1 软件架构图Fig.1 Software architecture diagram
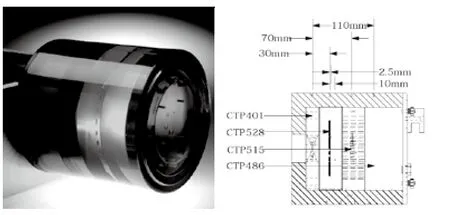
图2 Catphan500模体剖面图Fig.2 Catphan500 phantom profile
因为在图像采集的过程中模体摆放的位置是不固定的,所以在对图像的自动化分析之前需要定位模体在图像中的位置。本软件中模体定位模块用于找到模体摆放的位置坐标,为下一步对模体的各个组件进行分析做准备。本软件通过找到模体各个组件所在的层数、模体的中心坐标、模体的偏移角度三个参数来定位模体。
因为模体各个组件与与模体CTP401组件的相对位置是已知的,所以只需要定位出CTP401组件中心所在的层数,就可以根据相对位置定位出模体各个组件所在的层数。算法流程如图3所示,首先通过Canny算法找到每层图像的边缘,其中CTP401模块的边缘图如图4所示,通过Hough变换检测到3个指定半径的圆,以每层图像是否能检测到3个指定半径的圆为组件分类的标准,这样就找到所有CTP401模块所在的层数,计算这些层数的均值便可以得到CTP401组件中心所在的层数。以CTP401组件的中心作为参考点,根据模体中各组件相对位置的实际尺寸,就可以计算出其他组件中心点的坐标。
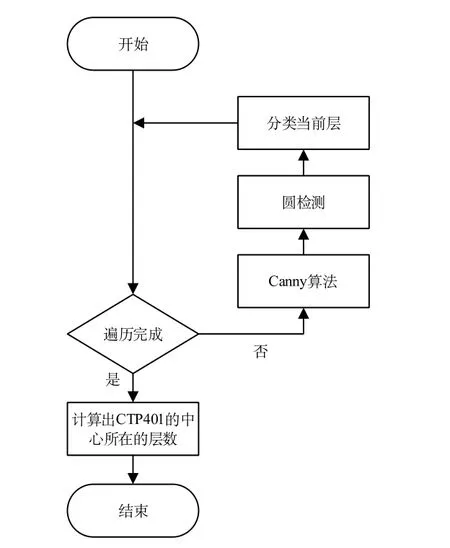
图3 CTP401组件中心点检测流程图Fig.3 CTP401 module center detection flow chart
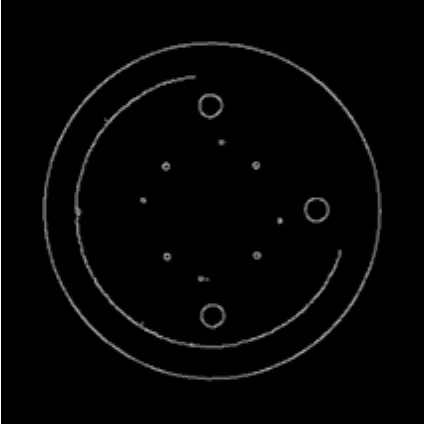
图4 CTP401组件边缘检测结果图Fig.4 CTP401 module edge detection result
模体的中心位置检测如图5所示,根据上一步在CTP401组件中检测的Teflon和低密度聚乙烯两个圆形ROI中心连线的中点计算得到。模体的偏移角度根据连线和图像坐标系x轴正方向的夹角计算得到。
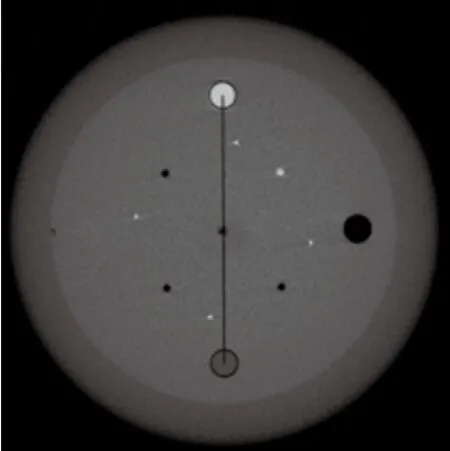
图5 模体中心定位结果图Fig.5 Phantom center positioning result graph
3 模体分析模块的实现
3.1 HU准确性分析
CTP401组件中嵌有4个不同X射线吸收率材料的圆柱形结构,用于测量HU准确性。本软件采用定位模体时使用的算法,首先使用Canny算法处理图像,提取图像的边缘,再使用Hough变换进行圆检测,得到特氟龙、低密度聚乙烯、空气三个圆形结构的圆心位置。如图6中白色矩形区域所示,以检测到的圆心为中心,选取边长为7 mm的正方形ROI,计算ROI中平均HU值用于HU准确性分析[2]。计算三个ROI的HU值的均值与物质实际HU值的差值,将差值与预设的阈值进行比较,得到分析结果。

图6 HU准确性ROI选取结果图Fig.6 HU accuracy ROI selection result graph
3.2 空间线性度分析
CTP401组件中有三个孔和一个内嵌的聚四氟乙烯圆柱体,用于测量图像的空间线性度。本软件如图7所示,通过分别检测出四个小圆的圆心,因为四个圆心围成的凸四边形是唯一的,使用Graham扫描法连接出如图7所示的凸四边形,再计算出凸四边形的各个边长用于空间线性度分析[5]。计算四条圆心的连线与实际尺寸的差值,将差值与预设的阈值进行比较,得到分析结果。
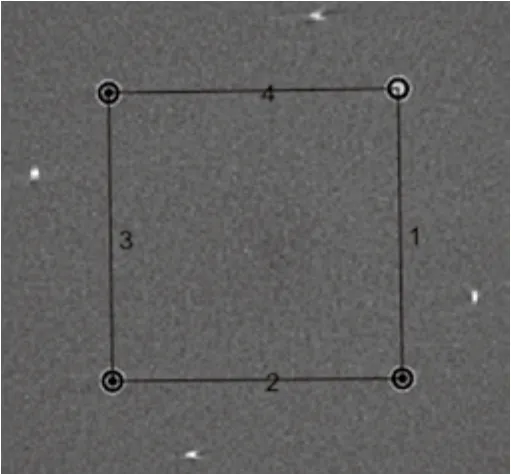
图7 空间线性度ROI选取结果图Fig.7 Spatial linearity ROI selection result graph
3.3 HU均匀性分析
CTP486组件是由X光吸收率等同于水的均值材料制成,用于测量图像HU均匀性。本软件根据模体定位模块计算得到的模体中心和该组件在图像中的层数,如图8中白色矩形区域所示,在CTP486上选取中心、上、下、左、右5个边长为10 mm的正方形ROI,计算ROI中HU值的均值用于HU均匀性分析[5]。计算五个ROI的HU值的均值与水的HU值的差值,将差值与预设的阈值进行比较,得到分析结果。
3.4 空间分辨率分析
CTP528组件内嵌有21组呈放射状分布的高密度线对结构,用于测量高对比度下的空间分辨率。空间分辨率的检测分为主观法和客观法。主观法通过调节窗宽窗位后观察图像来得到空间分辨率。主观法简单易行,但是带有主观性,只能得到整数的测试结果[6-7]。本软件使用基于Droege和Morin提出的测量方法[8-9]。

图8 HU均匀性ROI选取结果图Fig.8 HU uniformity ROI selection result graph

其中,M图案是高密度线对结构图案HU值的标准偏差,N背景是背景HU值的标准偏差,CT物质是栅组件材料的测量CT值,CT基体是基体的测量CT值。本软件根据模体定位模块计算的模体中心位置和模体偏移角度,结合每组线对的实际物理尺寸和物理坐标自动选取ROI。如图9所示,计算出各个周期组件图案的标准差、背景的标准差、栅组件材料和背景材料HU值的均值带入式(1)计算得到结果。

图9 空间分辨率ROI选取结果图Fig.9 Spatial resolution ROI selection result graph
4 测试结果
通过使用锥形束CT实验平台的图像对本软件功能进行验证,实验平台由两个正交的射线源组成。将Catphan500模体放在实验平台正中的载物平台上,保证圆柱形模体的轴线与实验平台的旋转轴线平行,载物平台下的转盘旋转360o采集一组图像,使用FDK算法[10]重建得到三维图像作为本软件的输入,根据软件输出的模体定位模块的模体摆位参数,以及模体分析模块选取的ROI验证软件的功能。
在10组实验中,本软件均能正确定位模体的摆位,选取模体不同模块的ROI,软件平均用时73 s。如图10所示,在125 kV,2 mAs的曝光参数下采集重建一组图像,然后使用本软件处理后得到图像QA的结果。
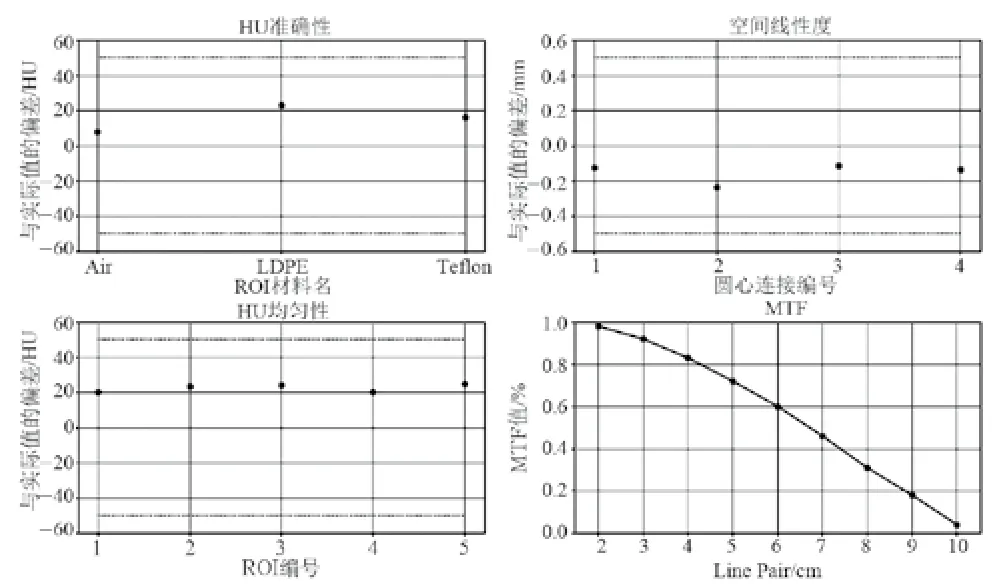
图10 图像QA结果图Fig.10 Image QA result graph
5 总结
本软件通过对采集到的图像进行特征提取,自动定位出模体的摆位并选取模体不同组件的ROI进行图像QA,提高了图像QA的效率和准确性。本软件的优势体现在:①缩短了锥形束CT图像QA的时间,减少了人工成本;②避免了操作人员手动选取ROI和观察图像的主观性,提高了图像QA的准确性;③能生成统一详细的图像QA报告,便于后续的数据分析。但是本软件也存在不足,暂时只能针对单一模体进行自动化图像QA,后续要扩展本软件的功能,支持更多模体的自动化图像QA。
