针对精神疾病患者的高精度定位跟踪算法
2019-01-30陈瀚谢大航
文/陈瀚 谢大航
1 引言
依据国家卫计委疾控局统计的《严重精神障碍信息管理月报》得出,中国各类精神疾病患者人数逐年增高,在一亿人以上。由于目前精神疾病患者救治条件有限,在长期精神疾病治疗过程中,对住院患者无法进行很好的管理,因此给医院带来很大的压力。
对于传统精神疾病专科医院来说,由于患者的特殊性:无主观意识、认知能力差、躁动不配合等因素,因此在管理患者时,需要花费大量人力与时间,每天护理人员都重复着繁重的工作与紧张的精神压力。卫健委印发的《重性精神疾病管理治疗工作规范》中对精神科患者的管控提出明确意见。因此利用先进的信息技术成果,开发精神病人的跟踪定位系统显得十分重要。
目前市场上用于人员跟踪定位的常用方法有:射频卡跟踪定位、Wi-Fi跟踪定位、蓝牙跟踪定位等等。然而每一种方法都会产生误差。由于病人所处环境和定位设备自身性能问题,有时定位误差相对较大,难以实现高精度、高可靠性的定位跟踪,这无疑会产生病人走失的隐患。
本文针对定位跟踪误差较大等问题,提出一种基于Kalman滤波的定位跟踪算法,该算法具有运算量小、精度高、易于实现等优点,可用于实际的定位跟踪系统。
2 算法原理
假设,在时刻k时,被监测人员的观测值为:

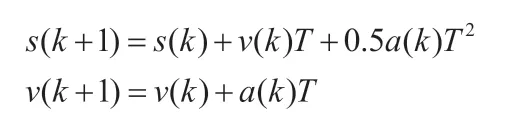
其中,s(k)为人与某一特定参考点的距离,n(k)为观测误差,本文假设这个观测误差服从零均值高斯分布。设k时刻被监测人员运动的加速度为,速度为v(k),则:
定义系统的状态x(k)为被监测人员的位置和速度,即
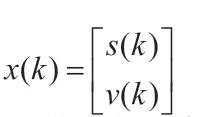
于是,便可得到某一方向上被监测人员的状态转移方程:

观测方程为:

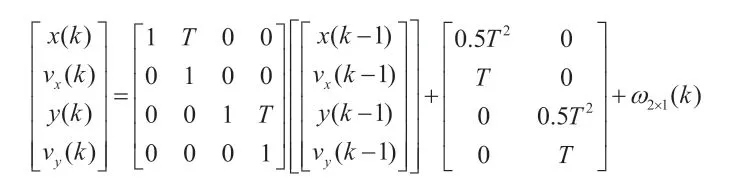
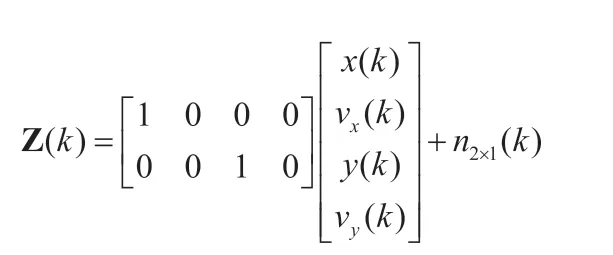
被监测人员的运动一般不会保持在某一特定方向,所以现将运动分解为横向X和纵向Y,这两个方向是互相正交的,则可得到如下的状态转移方程和观测方程,状态转移方程为:
观测方程为:
在得到系统的观测方程与状态方程后,便可依照Kalman滤波的迭代方法得到精确的被监测人员的位置和速度信息,Kalman滤波的具体方法可参照相关书籍。
3 仿真实验结果
假设被监测人员在二维水平平面上运动,初始位置坐标为(-100m,200m),x方向速度为0.2m/s,y方向速度为0.5m/s,观测噪声均值为0,方差为,10.按照Kalman滤波方案,可得到图1和2所示跟踪轨迹图和跟踪误差图。由图可知,使用Kalman滤波后,对人员的跟踪精度有了明显的改善。

图2:跟踪误差图
4 结论与展望
本文主要针对精神疾病住院患者的定位跟踪问题,设计了一种基于Kalman滤波的跟踪定位算法,该算法改善了跟踪定位精度,具有良好的实用前景。下一步工作将用硬件实现此算法,并应用到实际系统当中。
