用于6C动态评定的接触网几何参数自动调整技术研究*
2019-01-29张士奎
张士奎
(中国铁道科学研究院集团有限公司 国家铁道试验中心, 北京 100015)
铁路及城轨装备试验是人们在装备论证、设计、研制、生产、使用过程中进行的一项重要的实践活动。随着现代高技术铁路及城轨装备的快速发展,种类日益增多,结构日趋复杂,技术更加密集,对试验要求越来越高。为了检查全系统总体方案设计的正确性、协调性,验证单机产品的技术参数和性能指标是否满足设计要求;检验静态调试内容的合理性;考核系统间的匹配和工作协调性,铁路装备在研制完成后均需进行型式试验、验收试验、匹配性试验以及评定检验。其试验的测试覆盖性、测试的有效性以及测试结果的真实性将严重影响对该系统的评估,进而影响对该型号设备交付和使用的决策。接触网的良好状态对保证电气化铁路的安全正点运行至关重要。由于接触网露天架设,无备用,并要承受受电弓的强烈冲击,使得接触网的故障时有发生,已成为电气化铁路的一个薄弱环节。加强对接触网状态的监测, 按照“定期检测、状态维修、寿命管理”的原则,依靠铁路供电安全检测监测系统(6C)等手段,实行"运行、检测、维修"分开和集中修组织模式[1],是接触网修程修制改革的核心,是实现“预防为主,重检慎修”的接触网维修理念的重要前提。高速铁路供电安全检测监测系统(6C 系统)是保障供电设备安全可靠运行以及铁路运输畅通、安全的重要技术装备。6C 系统主要包括:高速弓网综合检测装置(1C)、接触网安全巡检装置(2C)、车载接触网运行状态检测装置(3C)、接触网悬挂状态检测监测装置(4C)、受电弓滑板状态监测装置(5C)、接触网及供电设备地面监测装置(6C) 和6C 系统综合数据处理中心[1]。在6C 系统中,高速弓网综合检测装置(1C)、车载接触网运行状态检测装置(3C)、接触网悬挂状态检测监测装置(4C)均采用了基于摄像机的接触网几何参数测量系统。然而,目前随着6C系统技术的快速发展,评定试验往往在室内完成,存在难以模拟和复现现场环境、数据的动态准确性难以验证的客观缺点。6C系统评定试验过程中试验主体和试验客体之间的矛盾、试验能力与装备发展不适应等基本矛盾尤为突出,试验方法、试验手段以及试验接口协调、试验数据可视化、试验质量控制等试验管理还存在一定的缺陷。
1 平台功能及设计思想
6C中的弓网监测设备实时连续监测整个线路的弓网位置状态情况。监测设备安装于运营车辆或专用车辆顶部,可连续监测接触网空间位置状态以及受电弓与接触网线的接触状态[2-4]。针对动态弓网检测设备的特点, 笔者尝试采用先进的空间尺寸给定系统,系统以两钢轨面顶面为水平面坐标、以钢轨两内侧面的中心面为垂直面坐标建立坐标系, 自动构建接触网线的空间位置体系, 预置接触网线的空间位置坐标(导高值、拉出值、动态高差等)。再让搭载有弓网运行状态在线监测设备的车辆运行通过评定段的接触网线位置, 测量得到接触网线的空间位置,评定检测设备的测量误差。平台架构如图1所示。系统主要由室外龙门架安装部分、机械调整机构、前端控制通信模块、高压隔离单元以及远程控制客户端组成。平台系统控制原理如图2所示。
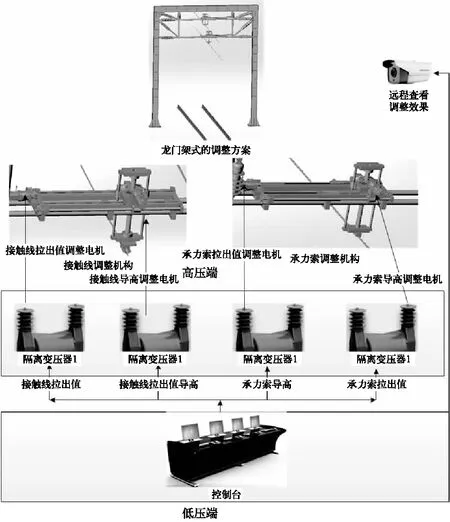
图1 平台架构框图
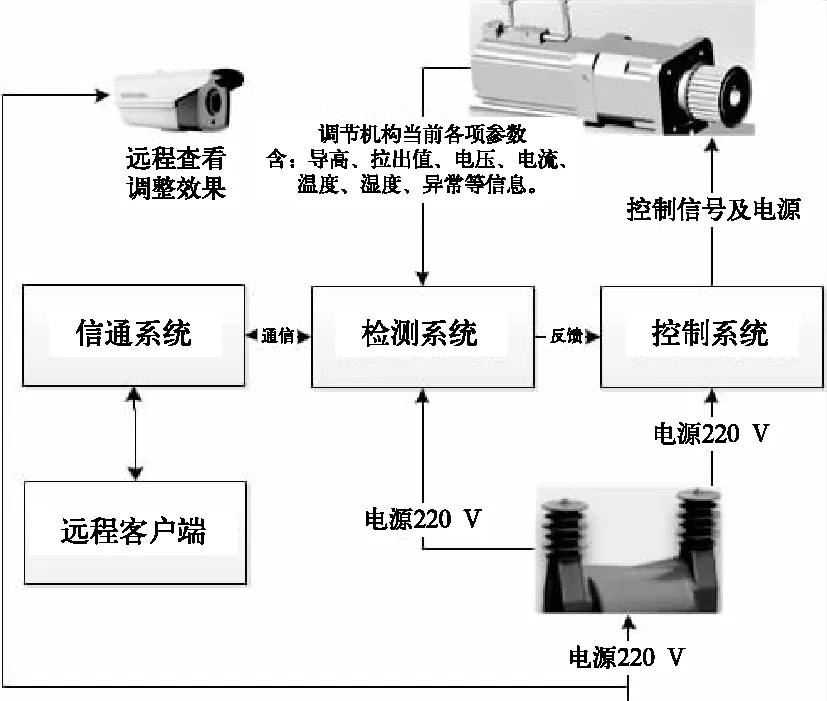
图2 平台控制系统原理框图
2 前端机械执行调整机构设计
2.1 总体性能
系统室外工作,振动试验性能能够满足《电气化铁道接触网零部件通用技术条件》、《电气化铁道接触网零部件试验方法》、《金属拉伸试验方法》、《金属布氏硬度试验方法》中有关规定。接触线定位点处在标准位置时满足接触网热胀冷缩时接触网顺线路方向的偏移和拉伸要求,弹性满足0.4~0.6 mm/N,整跨距弹性不均匀度小于等于8%。动态性能满足弓网受流性能指标的要求,接触线动态抬升≤120 mm。载流性能满足现有悬挂条件,整个机构能够在接触网短路,遭受雷击等极端情况下,电动操作机构不受影响,运动机构精度要求0.01 mm。
2.2 设计指标
机械执行机构技术指标:最大垂直工作拉力为10 kN,破坏拉力为30 kN;最大水平工作拉力为10 kN,破坏拉力为30 kN;最大垂直行程为800 mm,有效行程为500 mm;最大水平行程为1 500 mm,有效行程为1 200 mm。调整机构在断电的情况下能够保持原位,要求传动机构具有自锁功能。
2.3 机构试制
按照技术指标要求,整体机构如图3所示。该机构分为4个部分:机架、水平调整机构、竖直调整机构和线夹机构。机架由挽臂结构和水平导轨组成。
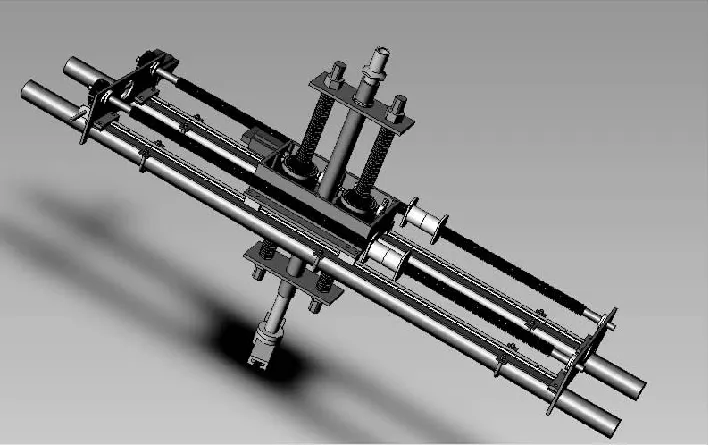
图3 机械机构三维模型图
水平调整机构和竖直调整机构传动部分均由伺服电机驱动,然后通过如图4所示蜗轮蜗杆、滑动螺杆传动进行调整,即将旋转运动转化为直线往复运动。竖直调整机构中滑动螺旋部分,螺母进行转动,螺杆做竖直往复运动。水平调整机构中滑动螺旋部分,螺杆绕定轴转动,螺母做水平往复运动。同时,添加导杆或者导轨以增强结构刚度。外露的结构均需安装防尘装置。线夹结构中,以现有线夹为基础,添加水平滑动结构和竖直缓冲结构,分别用以适应线材热胀冷缩变形和缓冲电弓的抬升力。
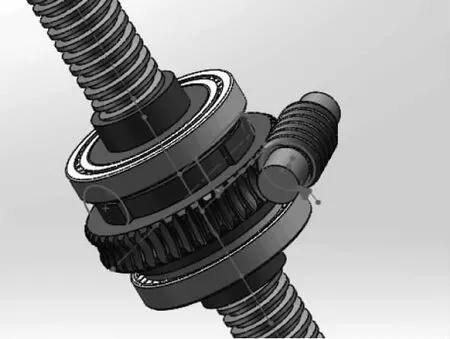
图4 蜗轮蜗杆三维模型图
蜗轮蜗杆机构:采用单头蜗杆,导程角为3°13′,满足自锁要求,当电机处于断电状态时,测量机构仍能够保持原位。蜗杆两端由深沟球轴承支撑,减小阻力,提高运动平稳性。蜗杆一端钻孔、开键槽,与伺服电机伸出轴连接。 水平调整机构采用双螺杆、双蜗轮蜗杆并联传动,考虑到其载荷分布的不对称性,单螺杆可承受的最大工作载荷取为F=6 kN。
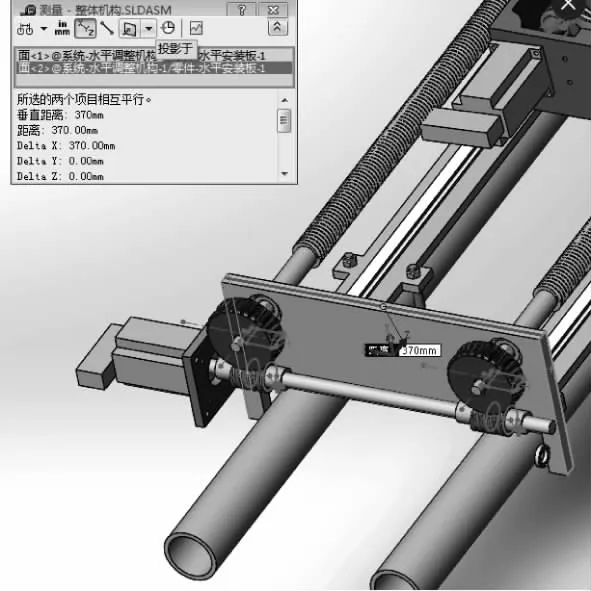
图5 执行机构水平调整机构三维模型图
执行机构水平调整机构三维模型如图5所示。圆柱杆即为挽臂结构,双挽臂提高机架的整体刚度,并防止调整机构倾覆。挽臂两端通过绝缘子固定在龙门式支柱上,间距可根据实际安装距离适当调整。水平蜗轮蜗杆机构:为使结构紧凑,采用双轴伸伺服电机,置中式安装,而蜗轮蜗杆安装在两侧。水平滑动螺杆机构:螺杆与蜗轮由键连接,将螺杆绕轴转动转化为螺母水平移动。螺杆两端通过角接触轴承安装在机架上,可承受较大的轴向力。设备整体质量由导轨和机架承受,螺杆在理想安装情况下不受径向力。螺母采用双螺母垫片调整式方案,利用垫片消除螺纹间的轴向间隙,提高调整机构往复定位精度。
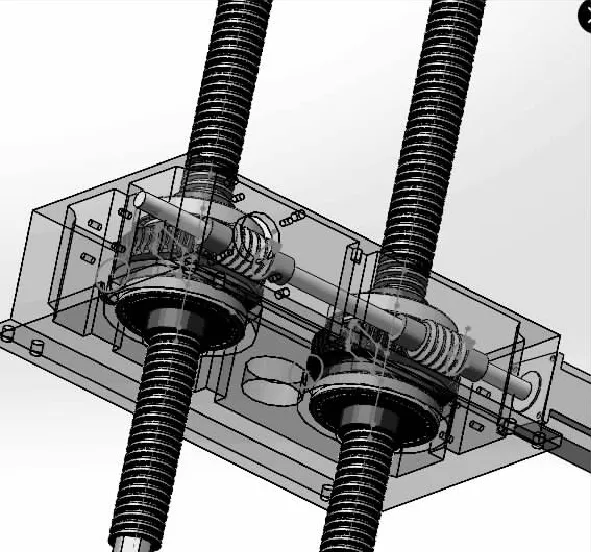
图6 执行机构垂直调整机构三维模型图
执行机构垂直调整机构三维模型如6所示。竖直调整机构由伺服电机驱动,蜗轮蜗杆和滑动螺杆由剖分式上、下基座封闭在内。基座两侧增设导杆,一方面与上下侧挡板作用,防止滑动螺杆转动;另一方面增加竖直调整机构的抗弯刚度,提高精度。
2.4 机构机械数理分析与安全校核
执行机构传功部分主要由滑动螺旋传动和蜗轮蜗杆传动两种类型组成。滑动螺旋传动机构采用钢制螺杆、青铜制螺母和单线梯形螺纹。滑动螺杆做往复运动,且需要较高的定位精度,因此螺母采用双螺母形式,用垫片进行调整螺母与螺杆的接触面,消除螺旋副在往复运动时的定位误差。在设计和制作过程中分别从螺纹牙型材料确定、螺纹长度的选择、耐磨性设计、自锁性验算、螺杆螺牙强度计算校核等方面来保证机构能够满足目标要求。限于篇幅,仅对蜗轮蜗杆传动进行论述。
水平蜗轮蜗杆传动同样采用钢制蜗杆和青铜制蜗轮。阿基米德(ZA)型蜗杆,齿形角α0=20°。蜗轮蜗杆传动的基本参数选择如下:
心距a=50 mm
模数m=1.25 mm
分度圆直径d1=22.4 mm
蜗杆头数z1=1
蜗轮齿数Z2=62
分度圆导程角γ=3°11′38″
变位系数x2=+0.04
2.4.1蜗杆

2.4.2蜗轮

2.4.3蜗轮蜗杆受力分析
滑动螺旋传动的驱动转矩包括螺旋副的摩擦转矩和支撑面的摩擦转矩。滑动螺旋副中螺母转动,螺杆作直线运动,支撑面为滚动轴承,摩擦力极小,故其驱动转矩近似于螺旋福的摩擦转矩。而蜗轮的转矩即为螺杆的驱动转矩:
tan(4.23°+5.32°)=
12 113 (N·mm)
蜗轮蜗杆润滑良好,转速较低,当不计摩擦力影响时,
Ft1=Fa2=Ft2tanγ=
312.6×tan3°11′38″=17.5(N)
Fr1=Fr2=Ft2tanα=312.6×tan20°=113.8 (N)
考虑到摩擦力和转动惯量的影响,采用较大的安全系数进行修正,取S=5。则电机选型时转矩T≥2S·T1=2×5×0.2=2 (N·m)。
2.4.4蜗轮齿面接触疲劳强度验算
蜗轮齿面接触疲劳强度验算公式为

Zρ指圆柱蜗杆传动的接触系数,与d1/a值有关,查得Zρ=2.6;
K指载荷系数,K=KAKβKV。调整机构载荷小,起动频率低,使用系数取KA=1;Kβ为齿向载荷分布系数,在蜗杆平稳工作时,取Kβ=1;KV为动载系数,由于蜗轮圆周速度较低,取KV=1.1。故,K=KAKβKV=1.1。
蜗杆齿面进行热处理,提高硬度。青铜蜗轮许用接触应力取最小值,[σH]=135 MPa。
代入数据,可得
135.8(MPa)≈[σh]=
135(MPa)
故蜗轮齿面满足接触疲劳强度。
2.4.5蜗轮齿根弯曲疲劳强度验算
蜗轮蜗杆传动因弯曲强度不足而失效的情况,多发生在蜗轮齿数较多(z2>90)或开式传动的情况。调整机构封闭式传动且润滑良好,发生齿根断裂的可能性较低,验算如下。通常把蜗轮近似成斜齿圆柱齿轮进行验算,公式为
YFa2为蜗轮齿形系数。按照斜齿圆柱尺寸进行换算,可得当量齿数
变位系数x2=+0.04,查得YFa2=2.3[σF]为蜗轮的许用弯曲应力。按照基本应力循环次数N=106,许用弯曲应力取最小值,[σF]=22 MPa。
代入数据,可得
21.6<[σF]=22 MPa
故蜗轮齿根满足弯曲疲劳强度。
2.4.6蜗杆刚度验算
校核蜗杆的刚度时,通常是把蜗杆螺旋部分看做以蜗杆齿根圆为直径的轴端,主要校核蜗杆的弯曲刚度,其刚度条件为
Et1为蜗杆圆周力,Ft1为蜗杆径向力,E为钢制蜗杆弹性模量,取E=2.09×105MPa。
I为蜗杆危险截面的惯性矩,
L′为蜗杆两端支承间的跨距,取L′=70 mm。
[y]为许用最大挠度,
代入数据,可得
0.000 6≪[y]=0.022 4 mm
故蜗杆满足刚度条件。
3 前端通信控制模块嵌入式设计
3.1 软硬件设计
控制系统是整个调整机构的大脑。导高拉出值的调整在于往复运动,利用电流的正反向原理,使电机实现正反转,从而达到利用往复运动的原理实现导高拉出值调整的目的。控制系统执行流程如图9所示。硬件主要包括核心单片机模块、电机驱动模块、复位和控制模块以及通信模块。
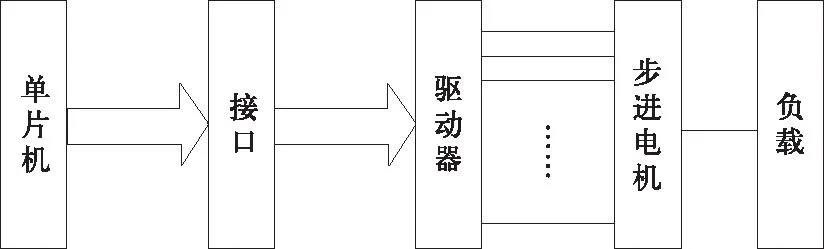
图7 控制系统执行流程
3.2 嵌入式软件功能组成
嵌入式软件功能主要包括IO端口初始化、配置及控制模块:负责IO端口初始化,保证各开关信号能正常检测。ADC端口初始化、配置及采集模块:负责ADC初始化,确保测距、温度、湿度等辅助传感器信号能正常检测。通信端口初始化模块:负责与无线端口进行通信。状态开关检测模块:负责正确读取状态数据并解析,使控制模块能根据状态数据作出正确的动作。测距和光电编码器检测模块:负责读取测距和光电编码器的数据,并准确解析,为控制系统正确的调整提供依据。控制电机正反转模块:根据算法需求,控制电机的方向。控制电机按步精确旋转模块:根据控制算法精确控制电机的运动。控制系统软件工作流程如图8所示。

图8 控制系统软件工作流程图
4 服务器远程客户端软件界面
软件操作界面如图9所示[6]。
控制系统启动后,在此界面进行控制操作。并伴随有实时监控图像,显示调整机构和被调设备的状况。软件界面包括6个板块:(1)调整机构控制区域,分为水平和垂直两个方向,只需要指定目标位置,再启动调整即可,简单快捷。(2)调整机构监控相机云台控制区域,可以上下左右旋转相机或拉长缩短焦距,以便查看想着重观察的区域,功能齐全。(3)调整机构返回的调整信息,如负载过大、调整到位或设备自检等信息。(4)调整机构的监控图像,实时图像。(5)调整机构选择区域,可以在调整机构信息管理栏内添加,然后在这里选择需要操作的对象,即实现了软件的通用化,一台计算机可以实现多台调整机构的控制和管理。(6)操作提示区域。

图9 服务器远程客户端软件图
4.1 软件结构一览
登录模块,登录流程如图10所示。

图10 登陆流程
用户输入用户名密码登录系统,登录成功进入系统后,系统根据给该用户分配的权限加载对应的模块。
用户管理模块如11所示。
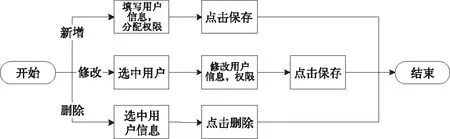
图11 用户权限对应的是相应的操作模块
摄像机管理模块:摄像机的基本配置和测试播放。
控制机构管理模块:控制机构的基础信息,关联摄像机等操作。
主控模块操作流程如12所示。
图12 主控块操作流程
上位机和调整机构指令流程如图13所示。
图13 上位机和调整机构指令流程
5 结 论
接触网的线路长、结构复杂、工作条件恶劣,运行经验表明接触网已成为高铁牵引供电系统的薄弱环节[7]。随着高速铁路通车里程的增加、列车运营速度的提高将加快未来高速铁路牵引供电6C系统的应用, 这对减轻现场工作人员的劳动强度、降低维修保养费用,都将具有重要意义,同时也势必对6C检测系统的准确度、可信度、可靠性,提出了更高的要求。因此开展6C评定工作十分必要。结合相关标准及计量规程,针对供电专业应用特点[3,5],开发用于6C动态评定的接触网几何参数自动系统作为线路动态评定装置,通过了实验室测试,印证了评定装置的实用性和有效性,为今后牵引供电6C系统动态评定试验奠定方法平台基础。
