面向限制水域USV协同运动规划的两层优化方法
2019-01-20伍星星徐雪峰林超
伍星星 徐雪峰 林超
摘 要:在动态海洋环境中对多无人水面航行器(USV)进行运动规划是提高任务效率和实现运动目标的重要要求。当前研究结合了智能路径规划和虚拟目标路径2种方法,实现多USV在受限海洋环境中协同导航。当前研究运用限制安全距离A*方法生成一条最优路径,然后利用样条平滑该曲线,作为基于虚拟目标的多主体导航框架的最优轨迹输入,实现为多USV导航。
关键词:路径规划;多航行器系统;路径跟踪;无人水面航行器
中图分类号:E925 文献标志码:A
0 概述
由于自动化机构的增加,研究组织和工业企业正致力于开发无人的、能在海洋环境中自主工作的航行器。在海洋环境中工作的高性能航行器曾仅是设想,如今,从敌对地区侦察到在危险天气条件下工作,USV在海洋装备中得到了运用。
据笔者所知,关于USV协同运动规划的以往文献中只选择了没有最优特征的原始形状的样条。当前工作结合了最优路径规划法(介绍在第2节)和Bibuli等人提出的虚拟目标法。最优路径规划在多USV体系上的扩展(根据Bibuli等人建立的思想),使路径追踪的理论奇异点被剔除,运动目标的收敛最优。除此之外,当前工作考虑了实时海洋环境下的海岸线效应对多USV运动目标的影响。
该文组织结构为:第1节描述了该文所采用的方法,第2节简要介绍了受限A*路径规划算法,第3节描述了多USV协调的基本路径追踪的概念,第4节描述了航行器协调运动的结果,第5节是结论。
1 方法
当前研究采用了一种面向多USV框架的两层方法。较高层次结构中,基于受限A*方法的鲁棒路径规划器生成最优轨迹点,然后使用拟合对其进行平滑处理。平滑处理后的轨迹被输入基于虚拟目标方法的较低层级的导航系统,该虚拟目标方法结合了基于吸引—排斥策略的群聚合算法。图1为该文所用方法的原理图。
2 路径规划
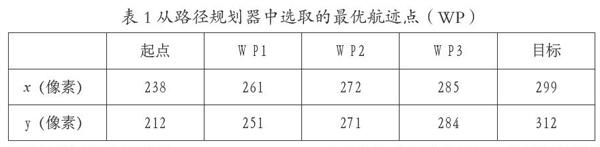
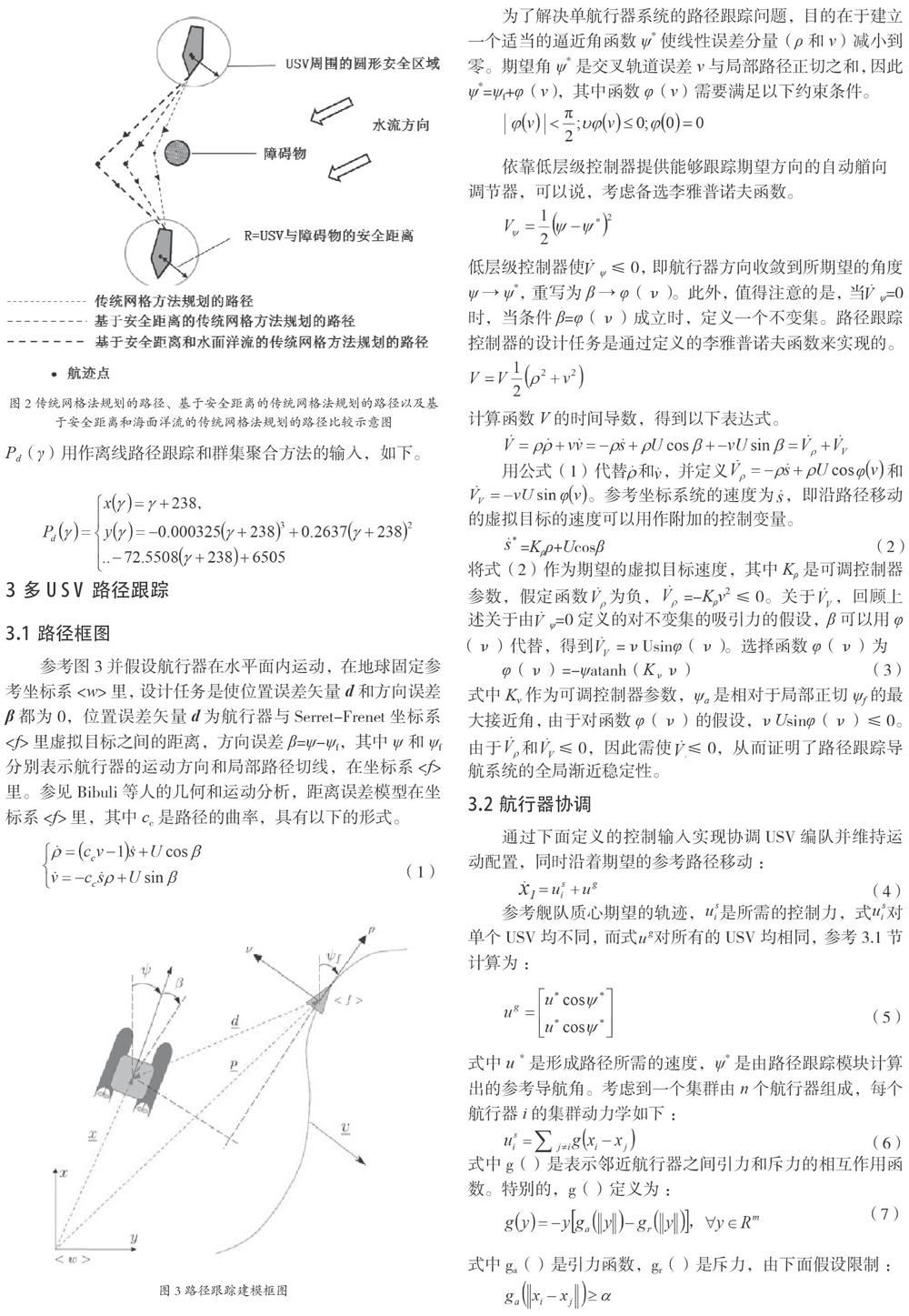
在线规划选择了朴次茅斯港的受限环境作为试验区域,如图1所示。如图2所示,安全距离A*方法正应用于港口环境,以产生最优航路点。在该方法在配置空间中以8连通度分辨率选择固定的开始状态和目标状态,即港口的二值图,其中障碍物(黑色区域)用1表示,开放空间(白色区域)用0表示。USV是非完整的载体,因此无法进行剧烈的操纵,需要平滑的轨迹。根据所提方法生成的航路点形成Z字形轨迹。被选用于平滑轨迹的航点列在表1中。选择航迹点时需要考虑离线方法在受限港口导航的复杂性。
所选择的航迹用γγ∈[0,61]表示多项式拟合。参数方程Pd(γ)用作离线路径跟踪和群集聚合方法的输入,如下。
3 多USV路径跟踪
3.1 路径框图
参考图3并假设航行器在水平面内运动,在地球固定参考坐标系
(1)
为了解决单航行器系统的路径跟踪问题,目的在于建立一个适当的逼近角函数ψ*使线性误差分量(ρ和ν)减小到零。期望角ψ*是交叉轨道误差ν与局部路径正切之和,因此ψ*=ψf+φ(ν),其中函数φ(ν)需要满足以下约束条件。
依靠低层级控制器提供能够跟踪期望方向的自动艏向调节器,可以说,考虑备选李雅普诺夫函数。
低层级控制器使ψ≤0,即航行器方向收敛到所期望的角度ψ→ψ*,重写为β→φ(ν)。此外,值得注意的是,当ψ=0時,当条件β=φ(ν)成立时,定义一个不变集。路径跟踪控制器的设计任务是通过定义的李雅普诺夫函数来实现的。
:
计算函数V的时间导数,得到以下表达式。
用公式(1)代替和,并定义和。参考坐标系统的速度为,即沿路径移动的虚拟目标的速度可以用作附加的控制变量。
=Kρρ+Ucosβ (2)
将式(2)作为期望的虚拟目标速度,其中Kρ是可调控制器参数,假定函数为负,=-Kρv2≤0。关于,回顾上述关于由ψ=0定义的对不变集的吸引力的假设,β可以用φ(ν)代替,得到=νUsinφ(ν)。选择函数φ(ν)为
φ(ν)=-ψatanh(Kνν) (3)
式中Kv作为可调控制器参数,ψa是相对于局部正切ψf的最大接近角,由于对函数φ(ν)的假设,νUsinφ(ν)≤0。由于和≤0,因此需使≤0,从而证明了路径跟踪导航系统的全局渐近稳定性。
3.2 航行器协调
通过下面定义的控制输入实现协调USV编队并维持运动配置,同时沿着期望的参考路径移动:
(4)
参考舰队质心期望的轨迹,是所需的控制力,式对单个USV均不同,而式对所有的USV均相同,参考3.1节计算为:
(5)
式中u *是形成路径所需的速度,ψ*是由路径跟踪模块计算出的参考导航角。考虑到一个集群由n个航行器组成,每个航行器i的集群动力学如下:
(6)
式中g()是表示邻近航行器之间引力和斥力的相互作用函数。特别的,g()定义为:
(7)
式中ga()是引力函数,gr()是斥力,由下面假设限制:
(8)
为了保持群形成项和路径跟踪导航项之间的实际平衡,分量修改如下:
(9)
式中ksat> 0是饱和增益,Ni(t)是航行器i的时变邻域。Bibuli等人(2014)正式证明了整個系统的稳定性,这种稳定性源于路径跟踪和群集聚合模块之间的互联。
4 结果
为了实现多USV在受限海洋环境中的复杂操纵,该节报告了3个和4个载体执行群集聚合和路径跟踪的结果。通过使用Bibuli等人引入的引力和斥力函数,试验结果解释了集群与海岸线外部碰撞的演变过程。在一定距离内,航行器的运动仅通过考虑海岸作为斥力定点集,可以实现避免与海岸线的碰撞。航行器间的相互作用及与海岸线的距离随引力和斥力函数参数的变化而变化。
5 结论
该文阐述了多USV的限制A*路径规划器与虚拟目标路径跟踪导航的集成。由路径规划器的模块化组成、航行器编队和导航编队程序带来的集成简易性,使其可以运用于实时海洋环境中。3个和4个USV的系列结果证明了该种方法的鲁棒性和避碰的有效性。未来研究的重点是通过测试不同安全距离和自适应编队维持产生的不同参考路径的组合方法来优化多智能体USV框架。此外,海流等环境干扰的影响将纳入组合框架的离线和在线级别内,来评估整个系统在不确定的海洋环境条件下的可靠性。
参考文献
[1]邢博闻.无人水面航行器技术[J].船舶工程,2019,41(1):9-10.
[2]李昆鹏,崔昆涛.军用无人水面航行器协同自治及控制设计[J].舰船科学技术,2018,40(23):141-145.
[3]吴汉才,谢保峰.船舶自动航行中的多目标遗传算法应用[J].舰船科学技术,2016,38(22):61-63.
