相机阵列在空间目标观测中的应用综述
2019-01-02曾海瑞孙华燕张廷华
曾海瑞,孙华燕,杨 彪,张廷华
(1.航天工程大学研究生院,北京101416;2.航天工程大学光电装备系,北京101416)
1 引 言
众所周知,随着航天科技的发展,人类空间活动的加剧,地球轨道空间分布了大量人造目标,包括卫星、火箭残骸和大量碎片,这些空间目标分布在不同轨道,严重影响了人类的空间活动,对太空安全造成威胁[1]。因此对这些空间目标进行有效地观测、识别,具有重要的战略意义[2]。空间目标的观测目前主要有两种方法:雷达观测和光学观测[3]。光学观测具有直观性强,成本低,不受地面杂波干扰影响,能够对空间目标进行有效搜索跟踪的优势,因此多国都建立庞大的光学观测系统对空间目标进行观测。
空间目标观测又以大视场、高探测能力、高分辨率为需求。近年来,由于大口径光学观测系统的种种限制,一些空间目标观测项目选择使用商用相机阵列和商业摄影镜头来实现低成本、广域的观测[4]。 如 FAVOR、RAPTOR、PANOPTES 和dragonfly等项目都依赖于多个带有商业镜头的相机,每天晚上都可以在广阔的天空中对空间目标进行观测[5-8]。相对大口径光学系统研制周期长、发展技术困难,成本高的缺点,相机阵列光学观测系统具有开发周期短、分辨率高、视场大、探测能力强的优势,发展迅猛[9-10]。因此基于各种应用需求,国内外都在相机阵列系统上进行了大量的研究,利用相机组阵特性在各个能力等方面突破,提高性能。本文主要从大视场、高探测能力、高分辨力这三个方面对国内外相机阵列光学系统在空间目标观测中的应用现状进行介绍,分析了其存在问题和发展趋势。
为了更好地了解相机阵列在空间观测中的广泛应用,表1列出了近年来,国内外运用到相机阵列系统且较为著名的空间观测项目。

表1 使用商用镜头的相机阵列的项目列表Tab.1 list of items for the camera array using commercial lenses
2 大视场相机阵列系统
对于观测系统的大视场需求,根据几何光学原理,望远镜系统视场和焦距成负相关关系[11],在不降低焦距的情况下,相机阵列系统采用多镜头多传感器系统对空间不同区域进行观测,来扩大观测视场[12]。
2.1 基于视场拼接的大视场相机阵列系统
日本的青山学院大学于2010年开始进行AROMA-W项目,该项目用于对广域天体目标的自动化光学测量[13]。该项目的成像系统由12台数码单反相机组成,包括2台f 200 mm/F 2.8的佳能EOS5D和10台f 100 mm/F 2.0的EOS350D相机,如图1(a)所示,光轴指向不同,经过视场拼接后,系统观测视场达到45°×30°,极限探测星等为12(曝光时间为20 s),后端接有四台计算机,进行数据分析与控制。每台照相机和赤道望远镜都由一台计算机控制,观测数据分别由四台计算机获取,并通过局域网转发到一台分析机,分析机可以实现自动化的点目标提取,并与星表进行比较,以确定目标位置,从而对光学瞬变现象进行记录,实现空间目标的检测与跟踪。
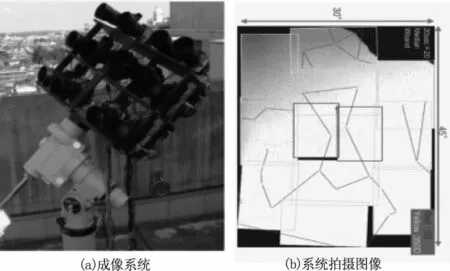
图1 AROMA-W系统Fig.1 AROMA-Wsystem
该相机阵列系统的优势在于利用佳能EOS5D和350D相机的视场大小不同,按照一定的位置进行设置组合,经过调整指向,使得重叠视场变小,可观察视场大大增加。最后经过有效的视场拼接,将各个相机同时观察到的图像拼接在一起,实现大视场观测,从而可以对更多的目标进行监视、识别。但是由于此系统的成像系统采用的是不同镜头,所以不同相机之间球差、像散和畸变差异较大,导致图像差异大,使目标的数据提取比较造成困难,如光度测量。
2009年,匈牙利科学家Bakos G等人发起HATSouth监测网络[14-15],是世界上第一个完全采用同类自动控制宽视场望远镜组成的全球天体监视网络,其具备整个半球的全天时监控能力,它的相机均采用相同型号类型。该监视网络构建的主要目标是探测识别大量的长周期小半径的太阳系外行星。HATSouth采用6组望远镜阵,布设在南半球的三个不同位置,每个测站布置两组系统,实现了全经度覆盖。如图2所示,单个望远镜阵列采用4个0.18 m口径、f/2.8的商业天文望远镜,视场为 8.2°×8.2°,后端采用四个4k×4k的商业相机成像。各个站的两组系统的监视网络可以实现2°×8.2°×8.2°立体角的连续观测。

图2 装有4台相机的HATSouth分系统Fig.2 HATSouth subsystem with 4 cameras
为开展地球同步轨道(GEO)空间目标监视试验,上海天文台在2017年研制了具有超大视场的“地球同步轨道带动态监视光学系统样机”[16]。系统样机由4个尼康定焦镜头组成,分别安装在4个赤道仪上,镜头口径为143 mm,焦距为400 mm,分别配备一台科学级 CCD相机,分辨率为3056×3056,像素尺寸为24μm。单个单元视场约为5°×5°,构成相机阵列后视场可达到10°×10°。经过视场拼接得到大视场图像后,通过后端数据处理技术,用相邻帧图像差分法去除大部分恒星虚警,利用航迹关联确认目标,每个夜晚可观察识别视场内50个GEO目标,能够同时对27颗GEO目标进行连续观测。
基于视场拼接的大视场相机阵列系统主要包括前端成像系统和后端数据处理系统。前端成像系统由不同组的多个相机构成,相机的视场大小可以不同,经过一定的指向调整,使得视场重叠区域尽量地减小;后端处理系统主要包括图像处理系统和数据分析系统,关键技术是图像拼接。
2.2 基于广角镜头的大视场相机阵列系统
为了使系统达到更大的视场,对整个天空进行全方位观测,在视场拼接的基础上,人们往往使用半球形照相机,如鱼眼镜头相机和反射式全天空相机。但是此类相机的一个重要限制是它们有效的光阑很小[4]。而洛斯阿拉莫斯国家实验室(Los Alamos National Laboratory)开发的 RAPTOR-Q系统[17]选择另一种方法,使用一些小的广角镜头来覆盖所有或大部分可见的天空。该系统使用了5个f 24 mm/F 1.4的镜头,有效孔径为17.14 mm,视场几乎是典型的鱼眼镜头或反射式全天空照相机的三倍。最后将图像拼接在一起,视场可以达到180°×180°。图3显示了来自RAPTOR-Q系统的示例图像。

图3 RAPTOR-Q系统Fig.3 RAPTOR-Q system
2.3 高时间分辨率下的大视场相机阵列系统
为了在大视场观察的同时,提高时间分辨率,俄罗斯的天体物理天文台于2012年研制了MMT-6[18]项目,实现对空间目标进行快速广域的测量,对于这样的监控,需要选择最优的参数集,即视场的角度大小、探测极限星等和时间分辨率。事实上,在观测区域Ω检测到的事件数量M与焦距F、CCD像素个数N2、像素大小u、目标直径D、焦距F、曝光时间t以及事件持续时间T有关,关系如下所示:

式中,Fluxmin为可检测到物体的最小光通量。由上式可以看出,随着曝光时间的减短,时间分辨率的提高,可检测物体的最小光通量减小,从而可以在更大的视场内发现更多的事件。基于此原理,该项目通过在6路不同的望远镜光路系统中前部加入不同的颜色滤光片和偏振片,形成不同的组合,其单通道光路设计如图4所示,设置不同曝光参数对空间目标进行图像采集,以获得空间目标的瞬时不同的颜色信息和偏振信息,最大视场达到30°×30°,时间分辨率达到亚秒级。
该系统采用模块化设计,由一组基本单元组成,每个单元安装6个相机,分别安装在单独的挂载上。单元内的每一个相机都放置在具有遥控控制的悬架内,因此可以独立于其他装置。此外,每个通道都拥有一套颜色和偏振滤光器,可以拆卸。系统具有不同运行方式:在单色或者白光的常规大视场观测,提供最好的信噪比;窄小视场跟踪观测,所有的相机都指向同一点,即新发现瞬态,并观察它不同的颜色和不同的偏振信息,同时获得所有可能的瞬态类型的信息。模式转换预计将小于0.3 s。

图4 MMT-6项目单通道光路设计方案Fig.4 MMT-6 project single channel optical path design scheme
为了直观地了解不同的大视场相机阵列系统的区别,表2列出了不同的大视场相机阵列系统的性能参数。

表2 各大视场相机阵列系统性能参数对比Tab.2 Comparison of performance parameters of each large field camera array system
由表2可以看出,虽然以上项目的相机阵列系统都实现了视场的扩展,但是扩展的范围以及其他的性能参数均有所差异。由于采用了广角镜头,RAPTOR Q系统的视场最大,但是其探测能力较低;MMT系统的时间分辨率最高,并且探测能力较强,这主要归功于其独特的光路设计(在不同通道的光路中加入不同滤光器组合),但是其视场却只能达到30°×30°。因此在大视场相机阵列系统中镜头的选择和光路的设计尤为关键。
3 高探测能力相机阵列系统
相机阵列系统的高探测能力是通过高精度同步控制实现的,使相机阵列系统各子成像系统对同一目标区域同时成像,利用多帧图像的交集部分,进行图像的叠加,可以降低对目标的亮度要求,从而提高系统的探测能力。
美国的泛星计划[19],成立于2002年,目的是观测并搜寻可能会撞向地球的小行星,其采用4架口径1.8 m望远镜对准同一天区,数据将经过对比以移除由于芯片缺陷产生的CCD伪影以及像素坏点和宇宙射线的影响,然后把光线输入汇总(图像叠加),暗天体所占像元上的光电信号被叠加到4倍,相对孔径等效于单个的3.6 m天文望远镜。然而CCD的噪音(热噪音和读出电路的噪音)数量较小,只占像元数值的极小一部分,并且具有随机误差特点,也即4个CCD上的噪音不会在精确对应的像元上发生相加,提高了图像信噪比。
Dragonfly项目[8]是由美国多伦多大学主导进行的,在2016年对宇宙中表面超低亮度的星系结构进行自动化普查。该项目的成像系统如图5(b)所示,由24个f 400 mm/F 2.8的佳能长焦镜头组成,口径135 mm,表面涂有高性能的亚波长纳米复合光学涂层,统一安装在一个框架上,构成相机阵列,并包括24个科学级的商用CCD。图5(a)系统成像能力相当于一个口径0.4 m、F 1.0的折射望远镜,视场为2.6°×1.9°。系统镜头和相机个数最初为8个,镜头采集的数据由非共用的光路分别进行传输,对空间光度变化进行仔细跟踪,从而减少系统误差,提高背景估计和目标识别的准确性。
国内,2008年长春光学精密机械与物理研究所王鸣浩等人利用4台110 mm口径望远镜搭建了捆绑式望远镜系统实验平台,提出了将多镜筒捆绑在一起对同一空域进行观测。通过对多路图像进行叠加来抑制背景随机噪声、提高图像的信噪比和系统的整体探测能力,实验证明:图像信噪比平均提高1.58倍,探测能力近似提高0.5个星等[20]。2009年,国防科技大学ATR实验室[21]也利用四个小口径的大视场望远镜组成一个望远镜束系统,经过图像配准叠加,信噪比提高1.4倍。

图5 Dragonfly成像系统Fig.5 Dragonfly imaging system
航天工程大学光电工程教研室于2013年设计相机阵列光度测量系统[9],能够实现对空间目标的有效跟踪测量,如图6所示。成像系统由2个佳能EOS-1DC相机和2个天文相机组成,镜头为4个f 400 mm/F 2.8的佳能镜头,1DC相机的探测星等可达到11.85,天文相机可达到13.82。系统通过相机组阵,突破单个相机极限探测星等,探测能力提高约0.416个星等。除此之外,在观测快速运动空间目标过程中,通过合理设置曝光时间,可在短曝光条件下达到长曝光时间的探测能力,在提高探测能力同时,避免了运动模糊。

图6 航天工程大学相机阵列光度测量设备Fig.6 Camera array photometric equipment of space engineering university
由以上不同的高探测能力相机阵列系统可知,当各个相机指向空间同一目标区域时,经过对不同相机获取到的图像交集部分进行叠加等处理,的确能降低目标的亮度要求,提高系统的探测能力,但是同时也降低了系统的视场,使得可同时观测目标数量减少,因此相机阵列系统的选取需要在探测能力和视场大小上进行衡量。
4 高分辨率相机阵列系统
对于高分辨率的需求,斯坦福大学利用100个佳能相机,进行一定组阵排列,构建了高分辨相机阵列系统[22],在成像不完全重合情况下,适当降低各相机之间成像重合度并增加相机个数,然后将各相机获取的图像进行融合,从而显著增加成像分辨率。除了多镜头多传感器系统,多镜头单传感器阵列系统在空间目标观测中应用也很广泛,其中以合成孔径望远镜为代表。根据光束组合方式不同,合成孔径望远镜分为迈克尔逊型和菲索型[23],如图7所示。欧洲地基系统的旗帜甚大望远镜阵列(Very Large Telescope Array)[24]属于迈克尔逊型望远镜,其由四个口径为8.2 m的主望远镜和四个口径为1.8 m的可移动望远镜组成。不同望远镜的光束组合在一起,然后通过干涉仪发生干涉获取相干信息。迈克尔逊型望远镜利用多个镜头获取多通道,将来自不同位置孔径的光传输到光束合成器上,在出瞳面上获得干涉条纹,即复相干度信息,经傅里叶逆变换获得目标的像。

图7 迈克尔逊型和菲索型望远镜Fig.7 Michelson and fiso telescopes
美国NASA、JPL和洛克希德·马丁((Lockheed Martin)先进技术中心[25]建立了由9个125 mm口径独立小望远镜组成的等效口径为610 mm的多孔径菲索型成像干涉仪实验系统,该系统能够通过提取波前信息获得相位差异的传感技术实现倾斜误差和相位误差的控制。美国麻省理工学院(MIT)空间系统实验室[26]开展了自适应侦查Golay3光学卫星的研究工作,对子孔径结构、子孔径控制和多孔径相位主动光学控制进行了研究,并已经建造了自适应光学Golay3望远镜实验系统,系统是由三个口径210 mm的独立小望远镜呈正三角形排列构成的合成孔径阵列,等效直径600 mm,通过采用自适应控制技术实现波前的精密控制,达到高精度的共相成像。
5 结 论
随着世界各国空间活动的加剧,空间目标逐日增多,因此对空间目标进行有效地监测、识别,在太空安全中起着关键的作用。本文从大视场、高分辨率、高探测能力三个方向,就相机阵列光学观测系统在空间目标观测中的应用现状进行介绍和分类,并对不同项目的相机阵列进行比较,分析性能参数的差异及其原因,并强调后端图像处理的重要性。虽然相机阵列系统在空间目标观测的应用广泛,但同时也存在一些缺点,也是之后研究需要克服的困难,主要表现在:
1)镜头和传感器之间的非一致性。各个镜头和传感器由于制造工艺的问题,在光学性能上不能保持一致性。
2)分系统控制精度。各个分系统不管指向同一区域以提高探测能力,还是不同区域以增大视场,都对其指向精度提出了很高的要求。
3)相机镜头性能本身的局限性。相机阵列系统大部分选用商业镜头,相对专业定制的天文镜头,商业镜头的热稳定性、灵敏性等一些性能会有所欠缺。
