智能车库
2018-12-18重庆大学城市科技学院李向均李淑滢
重庆大学城市科技学院 刘 鑫 李向均 李淑滢 周 邓 李 敏 汪 鑫
随着社会的不断发展,汽车成为了最主流的交通工具,以至于汽车越来越多,这种现象造成了汽车车库极度紧缺。原始的车库占用的实体空间都比较大,不灵活,车库面积比较大,车主在停车与取车的时候都比较麻烦。“智能车库”能够有效地解决原始车库存在的问题。“智能车库”分为引导机器人与停放板和取车系统三个部分,引导机器人在下,顶着停放板进行工作。当车主来停车时,把车开上停放板,并在车库门口显示屏上确认停放,停放板自动进行的固定,导向机器人把汽车送到系统规划好的位置停车。当车主前来取车时,可以车库门前显示屏上输入取车码,然后导向机器人自动把汽车送到车库门口,供车主使用。
1 设计目的
“智能车库”设计的目的在于有效的解决原始车库在有效空间利用率不足,车主取车与停车不智能,付费系统单一,车位信息不明确以及大规模停车堵塞等问题。能够在有限的地理空间有最大的利用率,降低车库的价位,大力发展快捷,方便,灵活的现代化的生活方式,把“智能”真正的引进我们的生活。
2 工作原理
引导机器人部分:
1)引导机器人的视觉定位系统依靠地面上的二维码实行精准的定位与路线规划行驶,搭载红外传感器实现多方位蔽障功能,保证机器人在形式过程中的平稳,实现安全有效的把汽车运往系统所规划的停放位置(朱卫华,张敏慧,陈冶湘,一种立体车库控制系统及控制方法:CN 103823443 A[P].2014)。
2)自主充电,引导机器人通过电量识别后在电量不足的情况下依据地表二维码自主寻找充电桩,并进行定时充电。
3)机器人依据磁感传感器自主识别与停放板的工作点,依靠动力模块把停放好的汽车给抬起来,然后依据地标二维码规划路线运送车辆,停放完毕后以信息的方式通知车主(陈鲁,基于物联网技术的智能车库管理系统:山东建筑大学,2014)。
停放板部分:
1)停放板对角上搭载两组抱臂 ,底部中心位置搭载感应装置,方便引导机器人精准定位工作,当车主停好车并确认之后,两组抱臂工作,固定好汽车(刘腾,杜丹丰,刘培祥 等,小型立体智能停车库的设计:产业与科技论坛,2016,15)。
2)引导机器人与停放板通过停放板底部的磁性感应装置相结合,实现精准定位点然后进行工作。
3 系统设计结构分析
3.1 硬件部分
如图1所示主要分为导航模块,短信模块,动力模块,信息显示模块,电量识别模块,停车状态检测模块以及充电模块。导航模块主要依据机器人本身的二维码识别装置和地表二维码实现导航;短信模块是在车主停放完毕后给车主给予通知;动力模块分为运行动力模块(主要使车辆按路线运动),运载模块(依据车辆的重量使车辆悬空并保持稳定便于运输);信息显示模块主要是显示车辆的基本信息以及停放的位置等;电量识别模块识别机器人本身的电量,在电量不足时自主寻找充电桩充电;停车状态检测模块主要用于检测车辆是否停好,只有在车辆停好后两组抱臂和导向机器人才开始工作;充电模块在导向机器人前来充电时,自动调节位置与其对接。
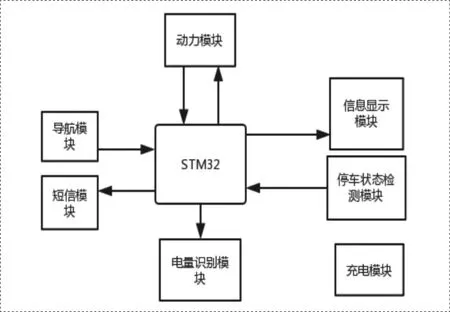
图1
3.2 软件部分
软件部分如图2所示分为存车和取车两部分,存车时,车主将车开上平台,确认停车后,系统将返回一个二维码用于取车,二维码包含分配的车位坐标及车牌号等,之后引导机器人将车运送到分配的车位,停车成功。取车时用户出示取车二维码,引导机器人将对应车辆取出运送到出门,取车成功。
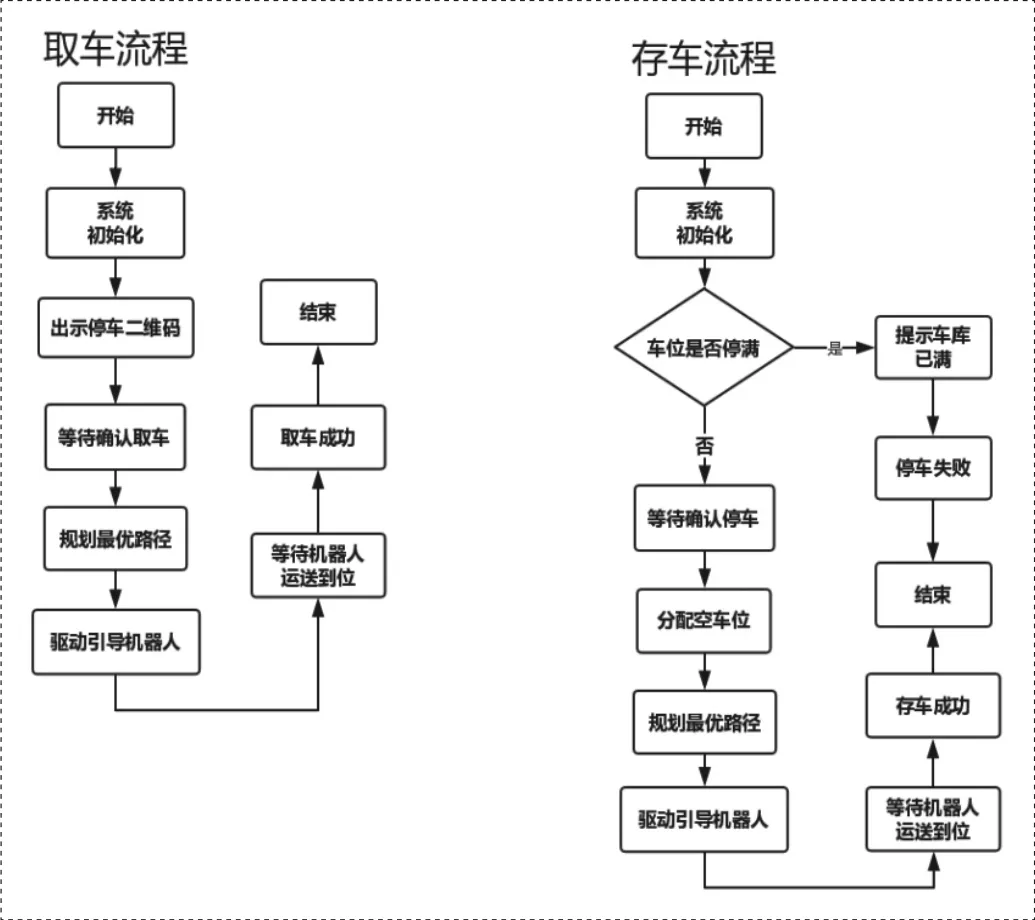
图2
