基于数据驱动的防空作战分布式协同决策系统设计
2018-12-06杨光段晓稳
杨光,段晓稳
(1 中国人民解放军91404部队 066000;2 中国电子科技集团公司第二十研究所,西安 710068)
0 引言
随着防御对象不断拓展,目标性能持续提升,应用电磁环境日益复杂,以及决策系统快速响应的实际需求,要求防空作战决策系统在未来具有针对大量目标数据高效的处理与分析能力,而这正是当前人工智能技术发展主要解决的问题[1,2]。同时,多武器节点如果在指挥节点的集中指挥下进行作战,则指挥节点必须进行战场所有信息的集中式处理与任务分配,对指挥节点的处理能力提出了极高的要求,并且多节点鲁棒性较差。而在分布式体制下,多武器节点可以基于战场一致态势进行信息处理与决策评估,大大减少对系统处理能力的要求[3]。
为了支撑防空作战决策系统在未来对复杂战场环境下大批量目标信息的实时及有效处理、更加准确地评估系统面临的来自目标的威胁等信息、实现在提升作战系统鲁棒性和实时性的同时更加有效和全面进行控制决策的能力、直接提升武器系统对目标的打击效果,并最终更加客观准确地对作战结果进行效能评估,本文提出基于数据驱动的防空作战分布式协同决策系统设计方案。
1 系统组成
1.1 武器系统组成
下面给出典型武器系统的组成图如图1所示。
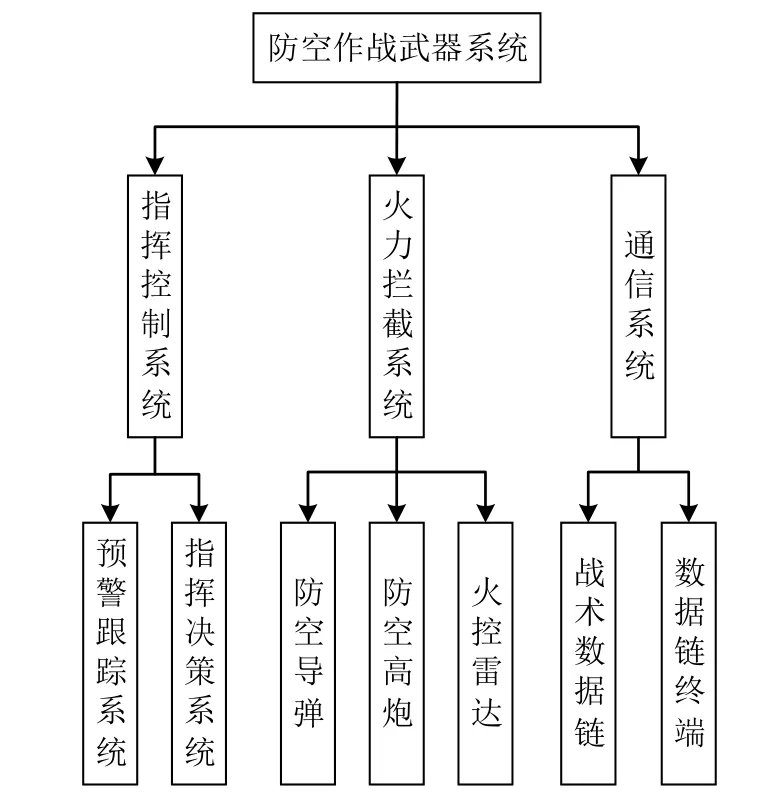
图1 武器系统组成图
1.2 分布式协同武器系统
在武器系统基础之上应用协同处理技术,各武器系统之间通过数据链连接便可以形成分布式协同武器系统,如图2所示。

图2 分布式协同武器系统
1.3 分布式协同决策系统
分布式协同决策系统是分布式协同武器系统的决策中心,包括警戒探测模块、数据分发模块、态势分析模块、任务分配模块、武器控制模块和效能评估模块。其中警戒探测模块负责战场态势信息的收集,包括环境信息和敌方目标信息等;数据分发模块负责不同平台间数据的共享,包括目标信息共享和作战方案共享等;在各平台形成一致性态势之后,态势分析模块对一致性态势进行分析,得到敌方目标的作战意图等信息;基于任务分配模块,位于不同站位的武器系统得到武器打击方案,方案将实现内部共享,如存在冲突将通过协调机制解决;在武器打击方案的基础之上,武器控制模块实现对目标的打击过程;效能评估模块对武器的打击效果进行评估,为下一步的作战行动提供支撑。分布式协同决策系统的组成如图3所示。
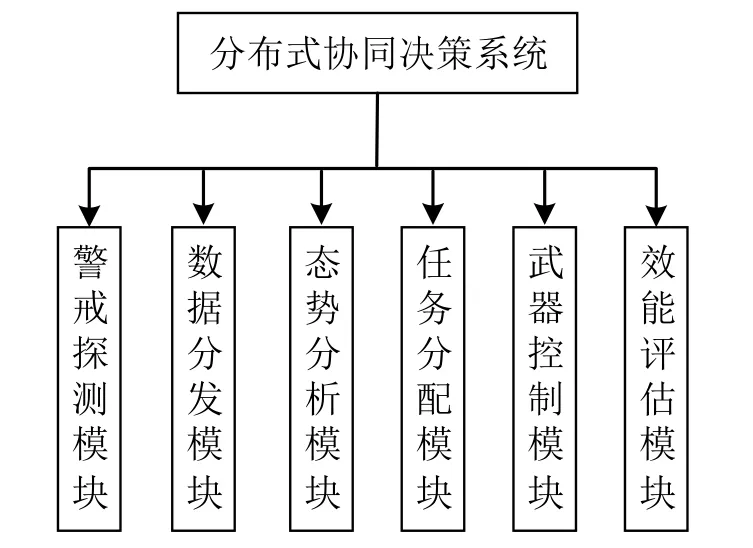
图3 分布式协同决策系统组成
2 系统设计流程
3 基于数据驱动的目标状态空间分析
对于单个目标,其在n时刻的状态空间变量X(n)可以细化表示为[Px,Py,Pz;Vx,Vy,Vz;...],其中Px,Py,Pz分别表示目标在n时刻的位置坐标,Vx,Vy,Vz分别表示目标在n时刻的速度坐标。多目标在n时刻的状态空间变量可以表示为单目标状态空间变量的集合{()}nX。对目标状态空间分析的思路如图5所示。
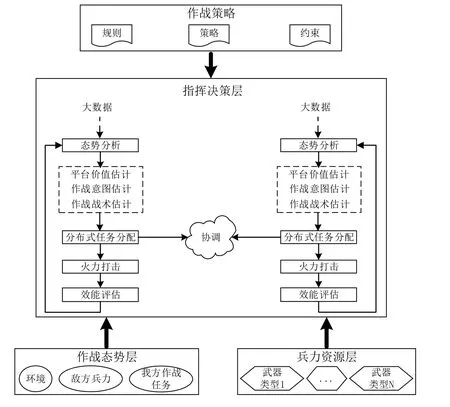
图4 系统设计流程图
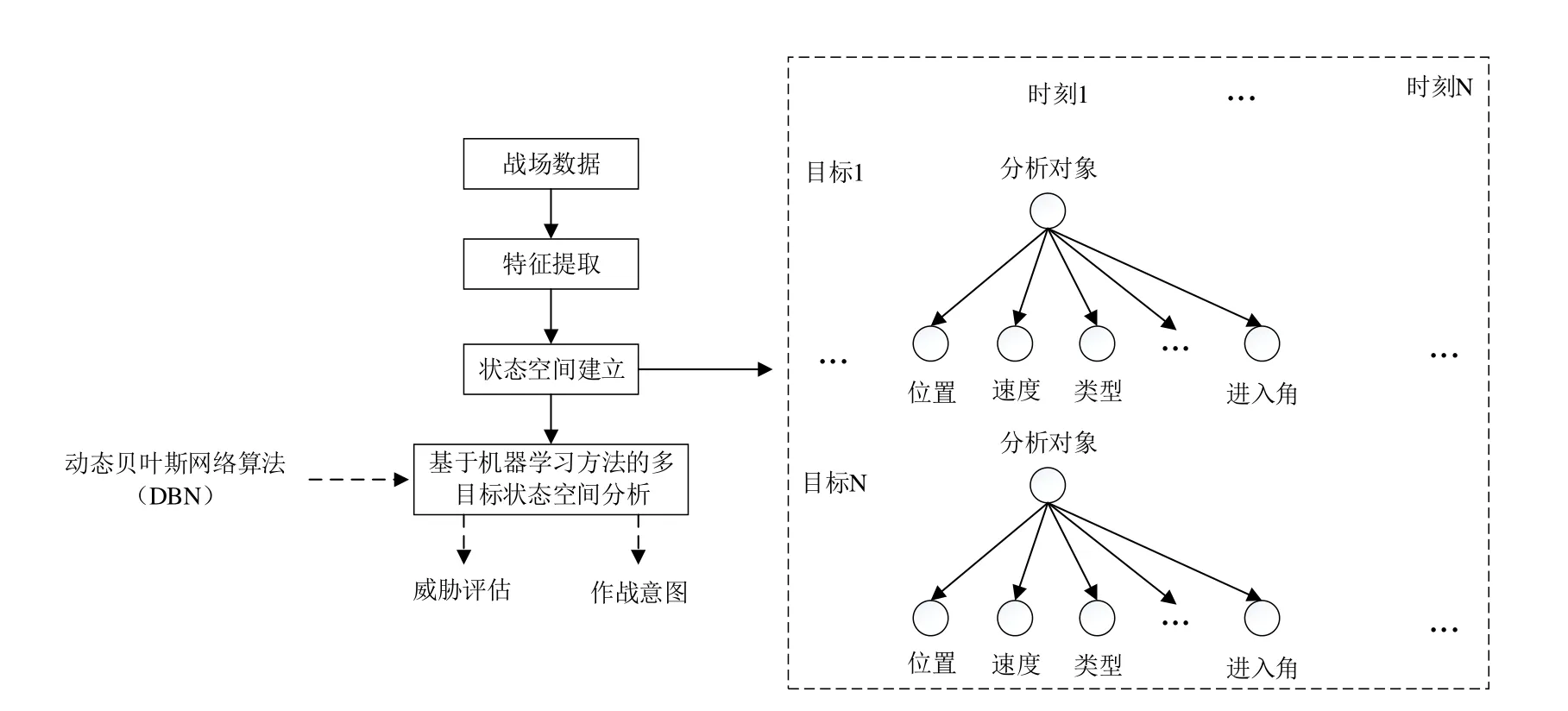
图5 状态空间分析思路示意图
首先针对战场数据,进行目标特征的提取,特征包括位置、速度等。在此基础上,形成所有目标的状态空间,状态空间按目标编号和时刻独立存储,形成所有目标对应的状态空间矩阵,可采用动态贝叶斯网络模型(DBN)对状态空间矩阵进行分析[4],最终得到目标的威胁信息和作战意图信息等。
4 分布式决策机制构建技术
协同打击分布式决策是在各武器节点的组织关系、作战能力下,根据作战任务、作战环境并综合考虑各节点的决策过程、协调方法,生成一致的决策结果。本文从节点组成、分布式决策同步机制、一致性协调机制三个方面开展研究。
4.1 节点组成
本文按照武器平台的指挥关系将节点分为指挥节点、协同节点。指挥节点进行任务分发、指挥决策、一致性协调等,协同节点对具体的作战任务进行分解,将任务分解为不同的决策过程并进行求解,同时协同节点将本节点的决策结果上报指挥节点进行一致性协调。按以上思路,可将分布式决策分解为指挥决策层、协同决策层、决策控制层三个方面,具体如下:
(1)指挥决策层进行任务分发、指挥决策,对各协同节点进行一致性协调。
(2)协同决策层对指挥节点下发的任务及既定的作战任务进行自主决策,并将决策结果上报指挥节点进行协调。
(3)决策控制层对具体的作战过程进行解算,得出决策结果。
11月13日7版上方照片说明“一年一度的上马已成为申城一道亮丽的风景”,用“一年一度的‘上马'已成为……”为佳。
4.2 分布式决策同步机制
每一个武器节点均具有一定的信息处理、决策能力,各节点分布在不同的位置,具有不同的时钟,也具有不同的决策时机。故分布式决策同步机制包含时间同步与事件处理同步。
(1)时间同步
在分布式系统中,各节点拥有不同的物理时钟,由于网络延时等因素造成各节点不可能完全时钟同步,在不同的决策周期,为保证各节点对某决策过程有序处理需要对时间同步机制进行研究。时间同步方法有三种:
a.时间排序。该机制不需要校准各节点的时间,只需要确定各节点上事件的发生顺序即可。该同步机制主要应用于不需要知道决策节点的准确事件的场合;
b.相对同步。该机制每个节点维持自己的时钟,并保存一张与自己有联系的其他节点的时间转换表,在各决策阶段进行适应性调整,以实现各节点的时间同步;
c.绝对同步。各节点在每次运行时间同步后,修改存储的时钟参数,保证各节点的时钟与参考点时钟一致。
本文拟采用相对同步方式,实现各节点的时间同步。
(2)事件处理同步
事件处理同步是指各节点在执行某决策时,由于各节点的触发时机不同,导致节点产生决策的时间不在同一个协调周期,而先产生决策结果的节点可能不是最佳处理平台,故需要对各节点执行某决策的时机进行同步。
本文中拟采用慢启动的方式进行协调。具体过程如下:
a.想定我方武器平台在执行协同作战某决策过程时,A节点先于其他节点被某事件触发,此时,只有A节点产生决策结果,但有可能不是最佳方案;
b.协调中心获取到 A节点对该决策过程的决策结果,但不立刻做出响应,将其记录在事件队列中,等待其他平台一段时间;
c.在预定的等待时间内,协调中心获取到其他节点的决策结果,按照一致性协调机制进行协调得出协调结果;若无其他节点的决策信息,则按照A节点的决策结果进行执行;
d.在决策完成后,将决策结果同步到各决策节点中完成该决策过程。
4.3 一致性协调机制
在分布式决策系统中,各决策单元在问题描述、求解策略、评价标准以及对环境的认知等方面的不同将导致求解过程的不一致。对于一个决策过程,各决策单元的求解均具有一个满意度,本文认为,一致性协调的目标是,通过寻找到一个决策结果,使各决策单元的综合满意度最高[5]。
设计一致性协调流程如图6所示。
5 多平台武器目标分配技术
5.1 问题描述
防空作战武器面临的来袭目标主要包括作战飞机、导弹、炸弹和无人机等。因为各火力单位对目标的毁伤效能以及诸目标本身价值的不同,所以火力单位对目标的分配存在诸多方案。火力分配的任务在于发挥诸火力单位的整体协调优势,寻求在给定约束条件下总毁伤效果相对较好的分配方案。
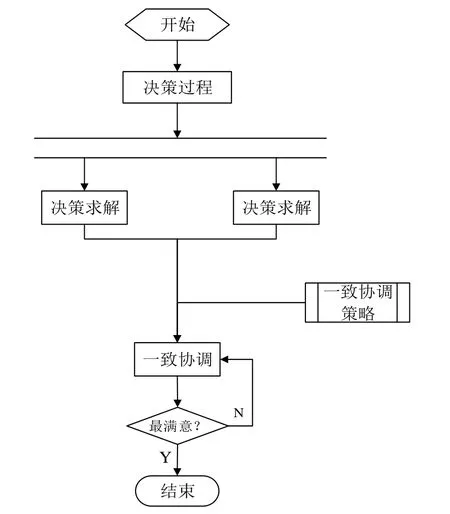
图6 一致性协调流程框图
5.2 流程设计
由于不同防空武器分别具有不同的作用对象和作用距离,所以认为针对这些火力单元整体的目标分配可以通过同步针对每一型的目标分配来实现。目标分配流程示意图如图7所示。图7中整个作战过程中的目标分配可以理解为每个规划周期内目标分配的滚动过程,后一阶段的决策需要将前一阶段的决策结果作为约束引入。在每一规划周期内,首先确定己方的所有武器集合和敌方的目标集合,然后根据每型武器的作用对象和作用距离确定其对应的待打击目标集合,紧随其后针对每型武器同步执行目标分配等后续过程,过程的主要环节包括设定规划周期、设定目标规划函数、设定约束条件以及生成打击方案,各火力单元基于生成的打击方案执行任务,并对打击结果进行效果评估,如果满足作战结束要求,则结束目标分配等过程,否则继续基于目标集和武器集确定下一阶段针对哪些火力单元进行目标分配。
6 结束语
本文首先分析了武器系统和分布式协同武器系统的组成,在此基础上,进一步对分布式协同决策系统的组成及相关模块的功能进行分析。紧随其后,将决策系统分为四个层次并给出了系统的设计流程图。通过对目标状态空间的构成进行分析,给出了对状态空间的分析流程。紧接着,通过节点组成、分布式决策同步机制和一致性协调机制三部分对分布式决策机制进行介绍。最后,设计了多平台武器的目标分配流程。
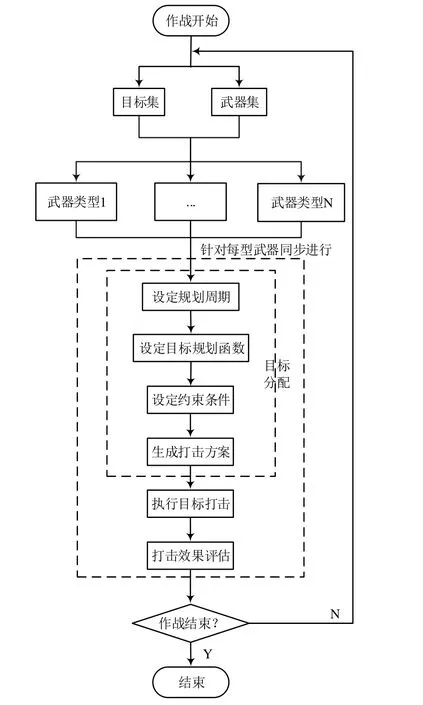
图7 目标分配流程示意图