仓储机器人底的研究
2018-11-16杨建辉蔡颖杰周圣云
文/杨建辉 蔡颖杰 周圣云
自亚马逊收购仓储机器人Kiva Systems开始,国内GEEK+、快仓、怡丰机器人、海康威视等公司相继推出了仓储机器人产品。仓储机器人主要应用于快递分拣行业,实现“人找货”到“货到人”的转变,有效提高货物的拣选效率和拣选准确率,目前在苏宁、唯品会、北方出版集团等公司得到应用。由于仓储机器人采用六轮底盘结构,其中两轮是驱动轮,其余四轮是万向从动脚轮,所以仓储机器人存在一个共性的问题,那就是驱动轮容易出现打滑。GB/T 20721-2006《自动导引车通用技术条件》中要求AGV行走路面起伏程度在1m2的范围内不超过3mm。而在项目实际实施过程中,AGV行走路面起伏程度一般都超过了3mm/m2,所以解决仓储机器人对地面的适应性问题尤为重要(地面起伏程度在8mm/m2也可以行走不打滑)。本文通过对驱动轮附着力的分析,提出了一种新的仓储机器人底盘,实现仓储机器人行走不打滑的目的。
一、现有仓储机器人底盘结构
现有仓储机器人底盘与卡内基梅隆大学的设计类似,底盘结构示意如图1。在仓储机器人底盘中间安装有两个差速驱动轮,四角各有一个万向轮。为了使AGV定位精度高,导航行走精度高,驱动轮必须接触地面并有足够的附着力。否则,驱动轮悬空或附着力小会出现驱动轮打滑,导致AGV跑偏。因而现有大多仓储机器人厂家采用驱动轮悬浮结构,如图2。

图1:仓储机器人底盘结构示意图

图2:驱动轮悬浮结构示意图

图3:驱动轮受力分析示意图

图4:新的仓储机器人底盘结构剖视图
从图2可知,驱动轮可绕绞点A上下转动,并通过另一端的弹簧力使驱动轮接触地面,以适应地面起伏,并提供足够的附着力。
二、现有驱动轮附着力分析
忽略驱动轮自重重量,对现有仓储机器人驱动轮受力分析如图3。
根据受力分析有:

式中: 为驱动轮的附着力; 为弹簧压力; 为A、C两点的水平投影距离; 为A、B两点的水平投影距离;为弹簧的刚度; 为弹簧的压缩量;为仓储机器人底盘空载时重量。
根据式(1)、(2)和(3)可得:

根据式(4)可知:当 和为定值时,弹簧压力不能太大,避免出现空载时把仓储机器人底盘上的其余万向轮悬空,导致仓储机器人行走出现不平稳现象;同时,由于地面不平的原因,会导致弹簧压缩量 变化,为了保证附着力受弹簧压缩量变化影响更小,弹簧刚度 不宜过大。
三、新的仓储机器人底盘结构
1.新的仓储机器人底盘结构介绍
新的仓储机器人底盘结构如图4,结构原理如图5。
与原有仓储机器人底盘相比,新的仓储机器人底盘由原来的一个整体底盘变成了上、下两块底盘。下底盘通过铰点E可绕上底盘转动。同时在上下底盘之间安装弹簧,实现上下底盘运动的缓冲。
2.新的仓储机器人底盘对地面适应性分析

图5:新的仓储机器人底盘结构原理图

图7:驱动轮上凸AGV底盘状态图

图8:仓储机器人底盘受力分析示意图
由于仓储机器人是六轮底盘结构,当AGV行走路面有起伏时,如果出现驱动轮悬空或附着力不够,就会出现AGV行走打滑。而新的仓储机器人底盘,由于采用上下底盘分层设计,可有效避免驱动轮悬空或附着力不够,同时也可避免万向脚轮悬空,保证AGV行驶平稳。如图6,地面不平使万向轮下凹时,下底盘绕铰点E向下转动,可确保上底盘驱动轮紧贴地面不会打滑;同理,地面不平使万向轮上凸时,下底盘绕铰点E向上转动,可确保上底盘驱动轮紧贴地面不会打滑;图7中,地面不平使驱动轮上凸时,上底盘向上转动,可确保上底盘驱动轮紧贴地面不会打滑;同理,地面不平使驱动轮下凹时,上底盘向下转动,可确保上底盘驱动轮紧贴地面不会打滑。
四、新的仓储机器人底盘附着力分析
1.底盘附着力受力分析
根据仓储机器人底盘的结构形式,对底盘整体、下底盘和上底盘进行受力分析,分别如图8、图9和图10。
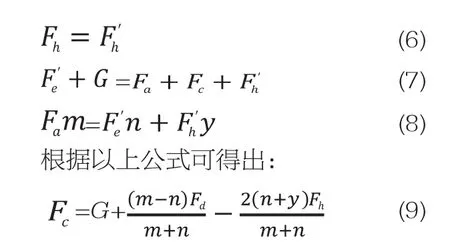
设前万向脚轮与地面的接触点为A,作用力为 ,驱动轮与地面接触点为C,作用力为 ,后万向脚轮与地面的接触点为B,作用力为 ,负载和下底盘重力作用在D点,作用力为 ,上底盘重力作用在C点,重力为G,铰点E处,作用力为 ,弹簧对上底盘作用点在H点,作用力为 。A、C两点距离等于B、C两点距离设为m,E、C两点距离设为n, H、C两点距离设为y,A、B两点距离为2m。根据力学平衡有:
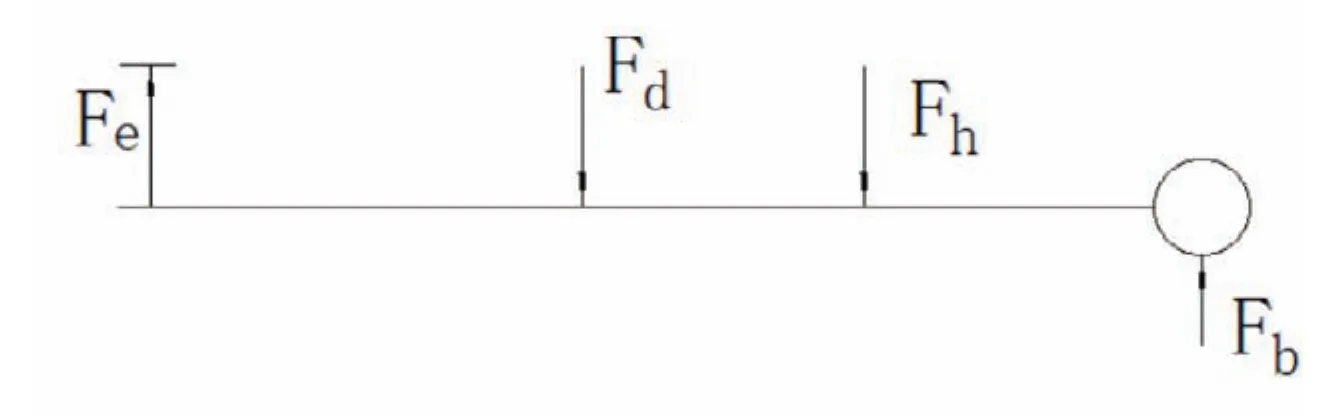
图9:下底盘受力分析示意图

图10:上底盘受力分析示意图

图11:附着力Fc与Fh的关系曲线
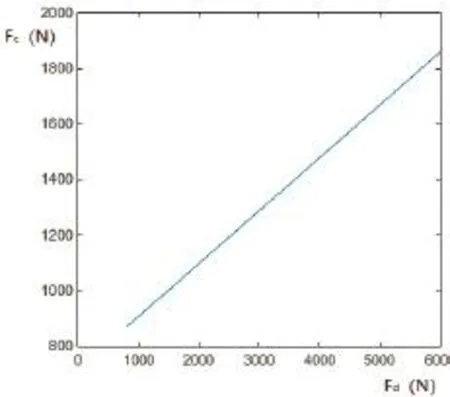
图12:附着力Fc与Fd的关系曲线


2.附着力影响因素分析
根据设计要求,仓储机器人上底盘重量G=1000N、 ≤6000N、
≤2 1 0 N、m=3 7 5 m m、n=255mm、y=170mm。从式(9)可知,当负载( )一定时,驱动轮附着力与弹簧弹力的关系曲线,如图11。当弹簧弹力( N)一定时,驱动轮附着力与负载的关系曲线,如图12。
从图11和图12可知:当负载一定时,驱动轮附着力随弹簧的弹力 增大而减小,由于弹簧弹力只是对上下底盘起缓冲作用,因而弹力不宜太大;当弹簧弹力一定时,驱动轮附着力随负载的增大而增大,从而可有效避免由于负载过大,驱动轮附着力不足而打滑。
五、结语
通过对现有仓储机器人底盘结构的附着力分析,本文提出了一种新的仓储机器人底盘,通过对新的仓储机器人底盘分析得出:新的仓储机器人上、下底盘采用铰接方式,使其对地面起伏的适应性更好;通过对底盘的受力分析,驱动轮附着力会随负载的增大而增大,可确保驱动轮不打滑。