机载卫星双星天线馈源运动学分析与ADAMA仿真
2018-11-14吴硕才任清川何思奇
吴硕才 ,徐 雷 ,任清川 ,何思奇
(1.四川大学 制造科学与工程学院,成都 610000;2四川九洲电器集团有限公司,绵阳 621000)
由于目前大多数卫星天线都只能跟踪一颗卫星,利用龙伯透镜多焦点的特性,设计双星跟踪天线成为未来卫星发展的方向。对双星系统馈源进行运动学分析,解算出双星天线俯仰轴与方位轴与空间坐标系之间的转换关系,能够为双星系统运动避障问题奠定基础。文献[1]直接运用几何关系,对机器人双臂末端的坐标进行运动学分析,最终实现了双臂机器人的实时避障。文献[2]通过向量相加,对三自由度摇摆台实现不同坐标系之间的相互转化,从而对其进行运动学分析,并且运用Matlab与ADAMS进行仿真,结果表明Matlab数值计算与ADAMS仿真结果一致,证明了运动学分析的正确性。文献[3-7]采用标准的DH法对机器臂进行运动学建模,然后利用反变换法结合几何法将机械臂的姿态用角度表示。文献[8]运用闭环理论对一种新型结构的机器人进行运动学分析,使得运动学等式的建立更加简单。DH建模法适用于关节个数较多的机构进行运动学分析,由于机载卫星通信双星天线的关节个数较少,直接采用几何法建立正运动学模型,能够简化运动学模型,使得求解逆运动学表达式更加简便,从而提高计算效率。通过Matlab对所得表达式进行数值计算,将所得结果与AMAMS仿真结果对比,验证求解表达式的正确性,为双星天线运动规划和避障奠定基础。
1 双星系统虚拟样机的建立
1.1 建立三维实体模型
该卫星双星系统主要由2个重叠的俯仰轴和方位轴、4对电机和减速器、支撑座以及龙伯透镜组成,其中4对电机和减速器分别驱动2个重叠的俯仰轴和方位轴旋转,使得2个馈源能扫描完龙伯透镜的整个半球面,由于2个馈源底面距离透镜中心的距离相等,因此在运动的过程中就有可能发生碰撞。运用三维建模软件UG建立了机载卫星通信双星天线实体模型,其三维模型如图1所示,各关节的运动范围为 0°~180°。
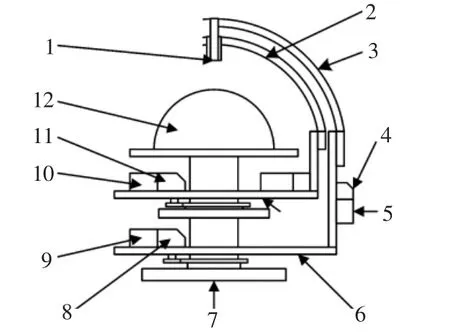
图1 机载卫星通信双星天线实体模型Fig.1 Airborne satellite communication binary star antenna solid model
其机构运动简图如图2所示。

图2 双星天线机构运动简图Fig.2 Schematic diagram of the motion of a two-star antenna mechanism
1.2 建立双星系统的数学模型
由于俯仰轴与方位轴具有重叠效应,因此只选用其中一个方位轴与对应的俯仰轴进行运动学分析。由几何关系可知俯仰轴和方位轴的旋转运动可以转化为馈源在球面上的复合运动,其简化数学模型如图3所示。当俯仰轴转动一定角度等价于馈源在竖直平面内转过相同的角度,而方位轴转动一定角度等价于馈源在水平面内转过相同的角度。
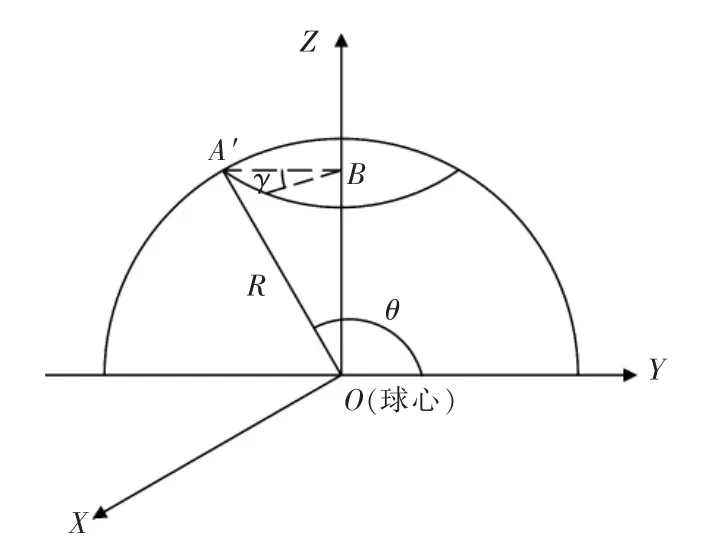
图3 数学简化模型Fig.3 Mathematical simplification model
图3中假设馈源底面中心点到龙伯透镜球心的距离为R,θ为俯仰轴从零点开始转过的任意角度,γ为方位轴从零点位置转过的任意角度,反映了双星天线运动过程的运动规律。
2 双星系统运动学分析
对于双星馈源的运动控制其实质就是对俯仰角、方位角的控制,直接的控制量是俯仰轴和方位轴的运动角度,而同时馈源也处于三维坐标空间当中,因此三维坐标与俯仰角、方位角之间的转换关系是双星系统避障策略研究的重点问题。这过程主要包括2个方面的内容,一是给定双星系统俯仰角和方位角,求双星系统馈源的位置,称之为运动学正问题;二是给定双星系统馈源的位置,来求双星馈源的俯仰角和方位角。
2.1 运动学正向解
将双星天线的运动分解为俯仰运动和方位运动,假定俯仰轴转过θ角度,而方位轴转过γ角度,馈源离龙伯透镜球心的距离为R。由几何关系可得:

因此可以得到当俯仰轴转过任意θ角、方位轴转过任意γ角,馈源底面中心点在空间三维坐标系OXYZ 中的坐标为(-Rcosθsinγ,Rcosθcosγ,Rsinθ)
2.2 运动学逆向解
当只知道馈源在空间坐标系中的空间坐标,而不知道各个俯仰角和方位角时,此时就必须要求出运动学的逆向解,即求出各个俯仰轴和方位轴的旋转角度。 假设某时刻馈源的坐标为(x,y,z),由前式(1)~式(3)可以反解出俯仰角 θ和方位角 γ。

3 数值计算及ADAMS模型轨迹运动仿真
3.1 数值计算
按照上述讨论提出的算法,取R=150 mm,以转过为分界线,分4种情况在Matlab软件内编写m函数进行数值计算,得到4种情况下的数值计算轨迹。其 4 种情况分别为①θ≤90°,γ≤90°;②θ≤90°,γ>90°;③θ>90°,γ≤90°;④θ>90°,γ>90°。
3.2 数值计算及ADAMS仿真结果
ADAMS虚拟样机仿真能够直观地观察到双星天线在给定的俯仰角和方位角下馈源的运动轨迹,并能得到馈源在运动过程当中的位移参数变化情况,对上面数值计算进行一定的验证。
3.2.1 仿真设置
通过对机载卫星通信双星天线的运动过程分析,对天线的运动结构进行简化,其简化模型如图4所示。
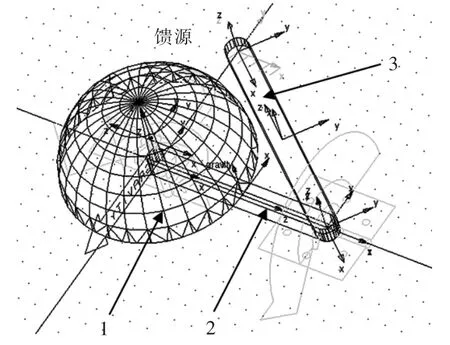
图4 馈源运动简化模型Fig.4 Simplified feed source motion model
为了保证与数值计算的参数一致,仿真时同样选择 4 组数据进行实验,即:①θ=0~60°,γ=0~60°;②θ=0~60°,γ=0~120°;③θ=0~120°,γ=0~60°;④θ=0~120°,γ=0~120°。在对俯仰轴和方位轴施加驱动时选择ADAMS中的STEP阶跃函数[9]定义旋转驱动,如第一种情况采用 step(time,0,0d,10,120d);step(time,10,0d,20,120d)。
接着对仿真控制器进行设置。持续时间选择20 s,输出仿真结果的步数设置为500。仿真开始以后,馈源首先以(0,150,0)点为零点,在 Y-Z 平面 0~10 s内绕X轴旋转,10 s~20 s内改变方向,在X-Y平面绕着Z轴旋转。
3.2.2 仿真结果
将ADAMS环境中仿真测量的数据导入到Matlab中,将这两类数据在一张图中绘出进行比较,其结果如图5~图8所示。
从上述4张图中可以看出,无论俯仰轴与方位轴如何变化,数值计算结果与仿真结果所得曲线均完全重合,由此可见Matlab数值计算结果与ADAMS仿真结果完全一致,从而验证了推导的运动学正向解的正确性,为双星天线的运动规划和避障奠定基础。
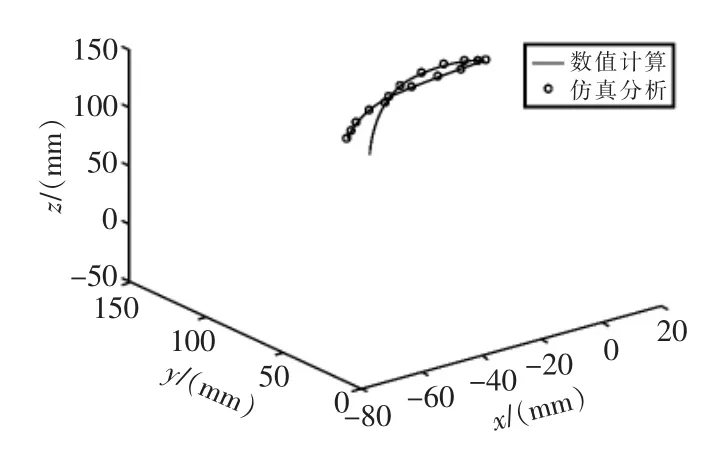
图5 θ=0~60°,γ=0~60°的数据对比图Fig.5 Data comparison diagram of θ=0~60°,γ=0~60°

图6 θ=0~60°,γ=0~120°的数据对比图Fig.6 Data comparison diagram of θ=0~60°,γ=0~120°
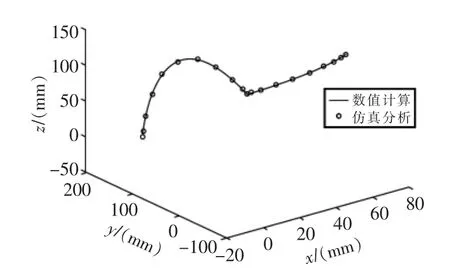
图7 θ=0~120°,γ=0~60°的数据对比图Fig.7 Data comparison diagram of θ=0~120°,γ=0~60°
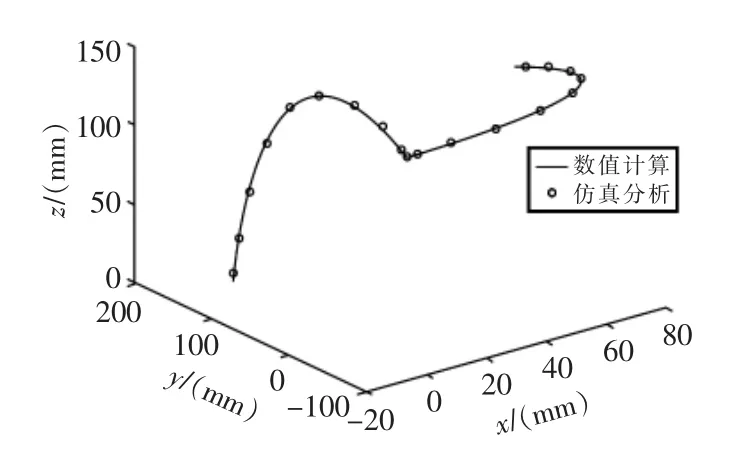
图8 θ=0~120°,γ=0~120°的数据对比图Fig.8 Data comparison diagram of θ=0~120°,γ=0~120°
4 结语
随着卫星通信在日常生活中越来越重要,双星天线将有着巨大的发展潜力。对机载卫星双星天线馈源进行运动学分析,解算出双星天线俯仰角、方位角与馈源在空间坐标系OXYZ中的位置坐标之间的数学关系,对于解决双星天线碰撞问题有着重要作用。同时ADAMS拥有强大的运动学和动力学分析功能,运用软件进行仿真,将所得结果与Matlab数值计算所得结果进行比较,能够在很大程度上对所得结果进行验证。
