一种基于改进霍夫变换的天基GEO目标快速检测算法
2018-11-13翟永立丁雷裴浩东
翟永立 丁雷 裴浩东
摘 要: 分析GEO空间目标和恒星在高轨探测器上的运动特性和成像特点,提出一种基于改进Hough变换的空间目标检测算法,以便有效地从复杂星空背景下提取出空间目标。采用均值加方差的方式选取全局阈值;根据末帧差分图的疑似目标点确定进行Hough变换的区域和潜在的轨迹端点;使用改进的单维Hough变换进行轨迹判断。实验结果表明,与传统Hough对比,算法的复杂度、占用内存和计算量都有明显降低,算法所用时间减小50%,可见该算法可以用于空间目标在轨实时识别,并且对噪声有不错的抵抗能力。
关键词: GEO空间目标; 在轨识别; 目标检测; 阈值分割; 复杂星空背景; Hough变换
中图分类号: TN957.52?34; TP391.9 文獻标识码: A 文章编号: 1004?373X(2018)22?0001?04
Abstract: A space target detection algorithm based on the improved Hough transform is proposed by analyzing the motion feature and imaging characteristics of the GEO space targets and stars on the high?orbit detector, so as to effectively extract space targets from the complex celestial background. The global threshold is selected by using the mean value and variance. The region for the Hough transform and the potential trajectory endpoints are determined according to the suspected target points of the last frame difference image. The improved single?dimensional Hough transform is used to judge the trajectory. The experimental results show that, in comparison with the traditional Hough, the algorithm has obviously?reduced complexity, occupied memory and computation quantity with its time consumption reduced by 50%, which indicates that the algorithm can be used for real?time on?orbit recognition of space targets, and has a good anti?noise capability.
Keywords: GEO space target; on?orbit recognition; target detection; threshold segmentation; complex celestial background; Hough transform
0 引 言
空间目标泛指人造地球卫星、空间碎片等地球附近的快速运动天体。空间目标的监视对空间态势的感知、保障在轨运行航天器的安全有着重要意义。而地球静止轨道(GEO)因其轨道特殊性,常常运行着各国天基信息网的关键节点卫星[1],所以对地球静止轨道带内空间目标的跟踪观测便显得极为重要,如美国2016年发射的gssap卫星[2]。
空间目标距离探测器较远时,其所成像仅占据有限个像素,为点状分布[3]。星图中恒星数量巨大,目标点完全淹没在其中。如何克服恒星及噪声的影响,对空间目标运动轨迹进行精确提取,是当前国内外航天科技领域研究的难点。
针对从序列图像中检测出运动点目标,国内外学者提出了许多检测算法,如光流法、匹配滤波和动态规划法等。光流法[4?6]可以直接计算目标的运动信息,但是计算比较复杂。匹配滤波[7]最大的缺点是在速度失配的情况下,检测性能将显著下降。动态规划法[8?9]避免了速度失配的问题,但须满足最优化原理和无后效性。基于Hough变换[10?11]的轨迹检测方法不仅能检测连续轨迹,也能检测间断轨迹,同时具有较强的容错性。但传统的Hough变换方法具有计算量大、占用内存大、Hough变换本身存在的峰值模糊、短线段淹没和无端点信息等缺点,并不能很好地确定空间目标的轨迹。针对这个问题,本文研究了GEO目标的运动特性,并在此基础上提出一种基于改进的Hough变换的空间点目标检测算法,可以减小Hough变换的复杂度与计算量,以实现空间目标轨迹的快速提取。
1 目标特性分析
远距离成像时,空间目标与恒星都为点状光斑,只占有几个像素,在形状上无法分辨。由于观测角度和太阳夹角的变化,空间目标灰度会发生变化,无法由灰度判断出目标和恒星。
观测卫星轨道位于GEO轨道下方,探测视场设为6°×6°,探测器阵列为1 024×1 024。恒星相对地心表现为慢速运动,自行最快的是巴纳德星,达到每年10.31″,绝大多数的恒星角速度都小于1″。根据计算,恒星在探测器上的移动速度约为每秒0.7像素。观测卫星与GEO轨道的轨道差为100~1 000 km,计算空间目标在探测器上的移动速度。可以看出,目标和恒星存在运动差异,适当增大采样间隔,即可看到明显差异,所以根据两者的运动差异进行区分,而且目标在视场内移动较慢,也有利于后续的跟踪观测。
2 Hough变换轨迹检测方法
星空图像是光电探测器的成像系统在极限作用距离上拍摄下的序列目标图像。当序列图像配准之后,背景恒星轨迹为点,而目标轨迹为一条直线。本文基于Hough变换原理,根据点目标运动轨迹为近似直线、运动的连续性和相关性,利用目标有限帧的位置信息进行Hough直线检测,提取出目标的轨迹,并对目标进行定位。基于Hough变换的空间目标算法的流程图如图1所示。
2.1 全局阈值分割
探测器拍摄的星空图像含有一定的噪声,并且星点所占像素数只是总像素数的一小部分。在此情况下,常规阈值求取方法求取图像均值时均值会淹没在噪声里,在进行阈值分割时分割出的图像会包含大量的噪声点,不利于后续对目标进行检测。
考虑到噪声一般多为高斯分布,根据高斯分布的特点,使用均值和方差来联合确定分割阈值,计算方法如下:
2.2 Hough变换轨迹检测
2.2.1 传统Hough变换不足分析
Hough变换的基本思想就是利用点?线对偶性,把带参数的曲线从曲线空间映射到以参数为坐标的参数空间中,根据该空间中的一些特征反过来确定曲线的参数值,从而确定图像中各种边界的确定性描述。
传统的Hough变换存在的几种较大缺陷:
1) 计算量大,每个边缘点映射成参数空间的一条曲线,是一对多的映射;
2) 提取的参数受参数空间的量化间隔制约,占用内存大;
3) Hough变换直线检测时还需另外计算判斷直线端点。
2.2.2 改进的Hough变换目标检测方法
针对传统Hough变换检测目标方法的缺陷,本文提出了以下改进:
1) 轨迹检测的端点确定。根据Hough变换的原理,Hough变换不能提供直线起点、终点的位置。根据序列星空图像的特点,图像配准差分之后,目标点不会被消除掉。所以在进行N帧差分图累加时,单独保存第N帧差分图,获取该差分图上的所有非零点[PN]。考虑到目标轨迹的连续性,这些非零点就是潜在的目标点,即可能的目标轨迹的终点。
2) Hough变换计算区域确定。Hough变换需要对每一个非零点进行变换。一般情况下,由于噪声的影响,并不能把背景恒星完全滤除掉,会因虚假目标过多而产生大量的无效计算,检测不到目标点,故需要进行一定的判断来进一步确定疑似目标点的范围。
经过多帧差分图累加后,目标会形成一条轨迹。所以在质心定位之后,以第N帧差分图中的非零点[PN]为基准,根据恒星在每帧图像的移动速度设置搜索半径。在累加差分图中进行非零点搜索,由于轨迹的连续性,若搜索到的非零点个数大于一定的阈值,就认为这些点为疑似轨迹点[PNiZ],对应的第N帧差分图上的点为候选目标点,保存[PNiZ]的位置坐标,后续将会使用这些点,按照所对应的[PN]进行分块Hough变换。而如果搜索到的非零点个数比较少,则认为对应的差分图上的点为噪声点或恒星,不必进行Hough变换。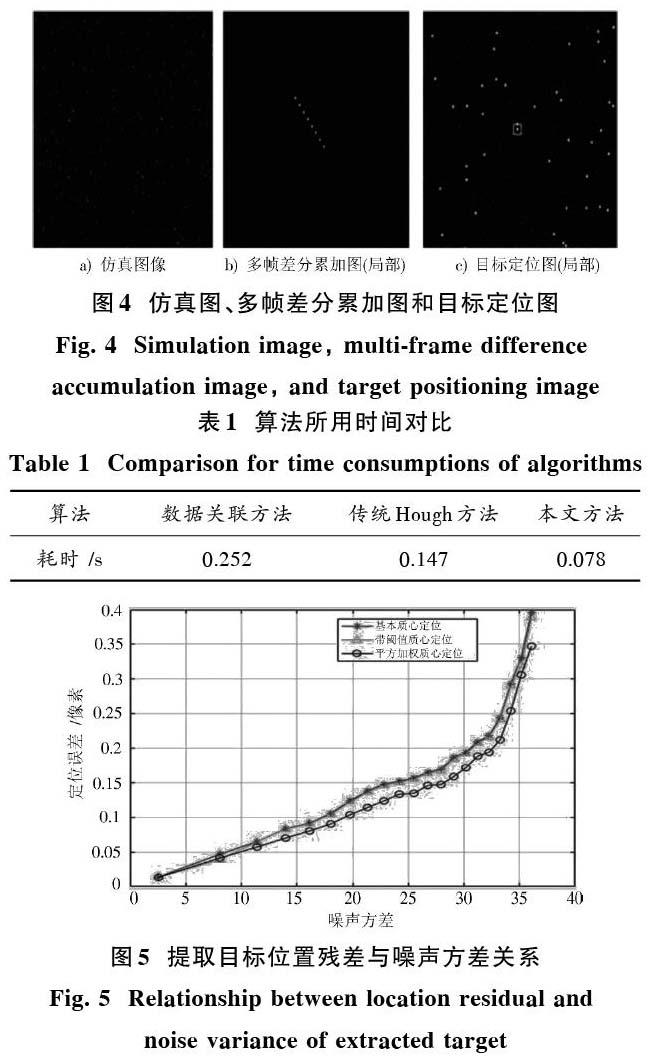
3) Hough变换计算。由于星空背景成像稀疏的特点,分块区域内包含的非零点不会太多,所以不必对参数[ρ]和[θ]都进行量化。考虑到第N帧差分图的疑似目标点作为轨迹的终点,轨迹近似为一条直线,故只需要对参数[θ]进行单维Hough变换即可。为了简化计算,本文不对[θ]进行从[0°~180°]的量化计算,而是计算区域内[PNiZ]与对应的[PN]点的向量倾角。建立一个角度数组[θN]用于存放计算的向量倾角,并添加一个标记值,用标记值来统计相同[θ]的个数[Nθ]。若[Nθ]超过一定阈值时,则认为对应的点形成一条轨迹,对应的[PN]为目标点。
改进Hough变换计算的详细流程图如图2所示。
3 实验结果分析
为了验证本文方法的有效性,本文根据背景恒星和空间目标在探测器上的成像特性进行序列星图仿真,并对图像添加了高斯噪声。图像分辨率为1 024×1 024,灰度等级为8 bit,相关算法在i5@3.10 GHz CPU,8 GB内存PC机上,利用Matlab 2016a编程实现。
由于星点在星空图像中所占比例较小,所以使用不同于常规阈值分割的分割方法。图3为不同分割方法的效果对比,可以看出本文方法更适合用于分割星空图像。
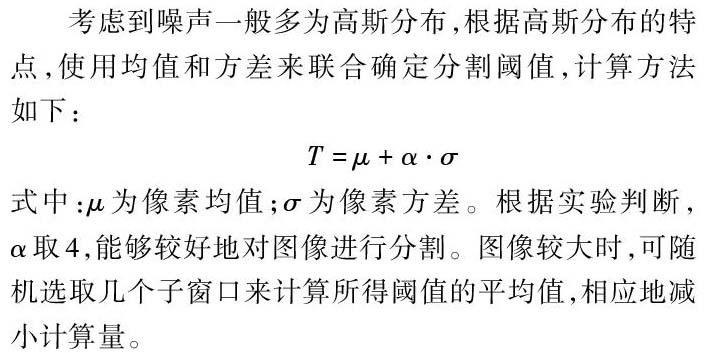
首先对仿真图像进行滤波、配准差分、质心定位等处理,然后对处理好的仿真图像,分别使用数据关联方法、传统Hough检测方法和改进Hough变换进行空间目标检测。仿真图、多帧差分累加图和目标定位图如图4所示。
检测算法运行时间对比如表1所示。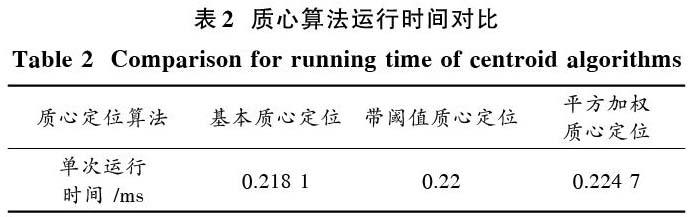
数据关联方法时间过长原因是配准差分后的残差点过多,每一帧都需要进行冗余的关联匹配。后两种方法则是针对累加图像,标准Hough变换需要每一个非零点进行Hough变换;本文所提方法则先确定进行Hough变换的区域,然后使用改进的单维Hough变换。所以本文方法相对于其他两种方法的运行速度有不小的提升。
由算法检测过程分析可知,目标定位的误差与检测算法无关,而是由图像预处理过程得到的质心定位误差决定。由于高斯拟合计算质心定位的复杂度比较高,视场内星点较多,所以本算法采用常用的几种简单质心定位方法进行对比。
