轮式滑移转向机器人运动分析及轨迹跟踪控制
2018-11-12李爱娣李春书
李爱娣,李春书,王 一,闫 尧
1 引言
轮式滑移转向机器人不需要专门的转向机构,其结构简单、运动灵活,在户外环境的工作和科学探索中得到广泛地应用。滑移转向机器人在转向时是通过车轮的滑动来实现的,但由于车轮的滑动,使其不满足非完整约束条件,其运动比有转向轮的机器人有更多的不确定性[1-2],因此,滑移转向机器人的运动控制较困难。近年来,一些研究者采用自适应控制和滑模控制方法进行轨迹跟踪研究[3-6],取得了一定的成效。滑移转向是一个复杂的现象,它涉及到机器人本体、车轮的动力学以及行驶路面附着状态等因素的影响。建立了四轮滑移转向机器人的运动学模型,对机器人稳态转向过程进行力学分析,并采用滑模控制方法对机器人进行轨迹跟踪控制,设计具有渐近稳定的滑模控制律,通过仿真证明所提方法的有效性。
2 运动学分析

图1 机器人结构简图Fig.1 The Structure of the Robot
四轮滑移转向机器人结构简图,如图1所示。机器人的轴距和轮距分别用L和B表示,机器人的质心为OG,其与几何中心重合,车体相对质心对称分布。定义机器人全局地面笛卡儿坐标系为O(X,Y,Z),其Z轴方向竖直向上;在机器人的质心OG处建立车体动坐标系OG(x,y,z),x轴沿着车体的纵向中心线,且其正向与机器人运动方向一致,z轴垂直向上。机器人的位姿由其质心OG在全局地面坐标系中O(X,Y,Z)的位置及其航向角θ(机器人前进方向与X轴正向的夹角)表示。为了便于对机器人进行运动性能分析,假设移动机器人为刚体,忽略轮胎变形,车轮的有效半径为r,且限定机器人在水平面内运动。
当四轮滑移转向机器人以某瞬心点C做平稳转向时,如图2所示。其左侧车轮和右侧车轮的瞬时转动中心分别为CL、CR,则机器人的瞬时转动中心C与CL、CR共线[3]。机器人作转向运动时,通常会有滑动现象的产生,使得机器人的质心OG与瞬时转动中心C之间在机器人前进方向上产生一个纵向距离e。令ωi、vi(i=1、2、3、4)分别表示车轮i转动的角速度和实际线速度,轮式滑移转向机器人在转向运动过程中,由于车轮间速度的耦合,车轮在路面上的运动是一个边滚边滑的过程,这一过程通常用车轮的滑
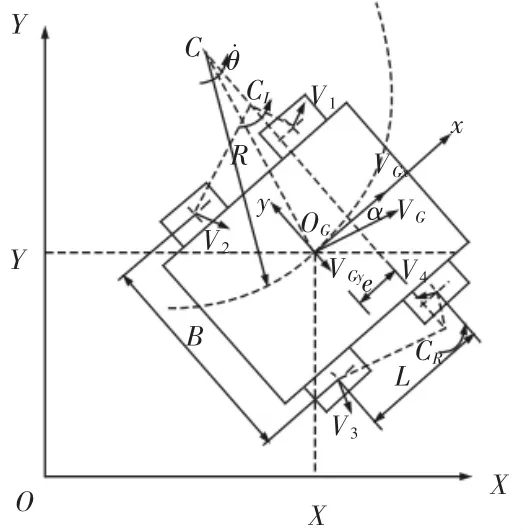
图2 机器人转向运动分析图Fig.2 Robot Steering Motion Analysis
当λ>0,车轮受到驱动力,此时的滑动率称为滑转率;当λ<0,车轮受到制动力,此时的滑动率称为滑移率。一般来说,机器人滑移转向时,内侧两个车轮产生纵向滑移,外侧两个车轮产生纵向滑转。机器人转弯半径不同,其滑移率也不同。
在全局坐标系中,驱动轮不打滑时的机器人运动学模型为:

式中:vGx—机器人的纵向速度;ω—机器人本体绕其几何中心的角速度。
假设机器人每侧两个车轮的角速度相等,有ω1=ω2=ωL,ω3=ω4=ωR,则 λ1=λ2=λL,λ3=λ4=λR。考虑机器人转向时的滑移,在机器人车体动坐标系中,机器人完整的运动学模型[7]为:
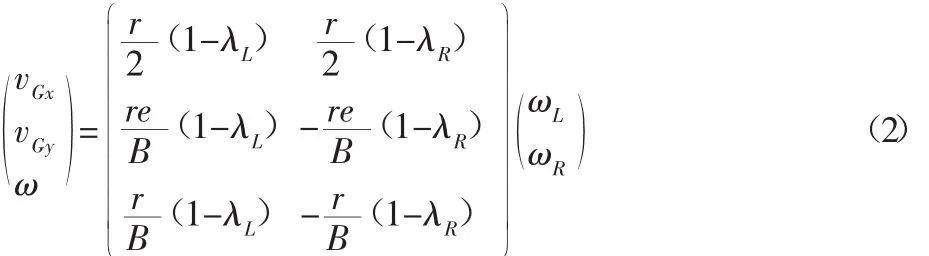
式中:vGx、vGy—机器人的纵向速度和横向速度。
3 平稳转向过程的力学分析
机器人滑移转向时其轮胎边滚边滑,受力状况比较复杂。为分析问题方便,假设其四个车轮和地面接触点的重力分布是均匀的,车轮与地面接触无沉陷且在运动中车轮与地面始终保持接触,若机器人的质量为m,则四个车轮所承受的垂直载荷可表示为FN1=FN2=FN3=FN4=mg/4,g为重力加速度。
机器人绕某瞬心点C做平稳转向运动时的受力分析图,如图3所示。根据地面力学理论,车轮i(i=1,2,3,4)受到纵向驱动力Fix、纵向阻力Fir和侧向力Fiy的作用。其中,纵向阻力包括来自地面的滚动阻力和来自空气的空气阻力。由于空气阻力较小忽略不计。滚动阻力可表示为Fir=fr·FNi,其中fr为滚动摩擦系数。
当车轮与地面没有滑移,即车轮做纯滚动运动时,车轮i所受到的纵向驱动力可表示为Fixτ=τi/r,其中τi为作用在车轮i的驱动力矩;当车轮被迫产生滑移时,车轮的驱动力需要克服车轮与地面之间的摩擦阻力才能使机器人运动,地面所承受的最大不打滑附着力可表示为,其中μi为行驶地面的附着系数。因此,车轮i实际所受到的纵向驱动力为Fix=min(Fixτ,Fixs)。
机器人在滑移转向过程中,轮胎在纵向滑转的同时,其侧向产生剧烈变形甚至滑动,侧向阻力大大增加。车轮所受的侧向力与滑移位移、滑移剪切力等参数有关,通常可简化表示为FNi,其中φi为侧向阻力系数。
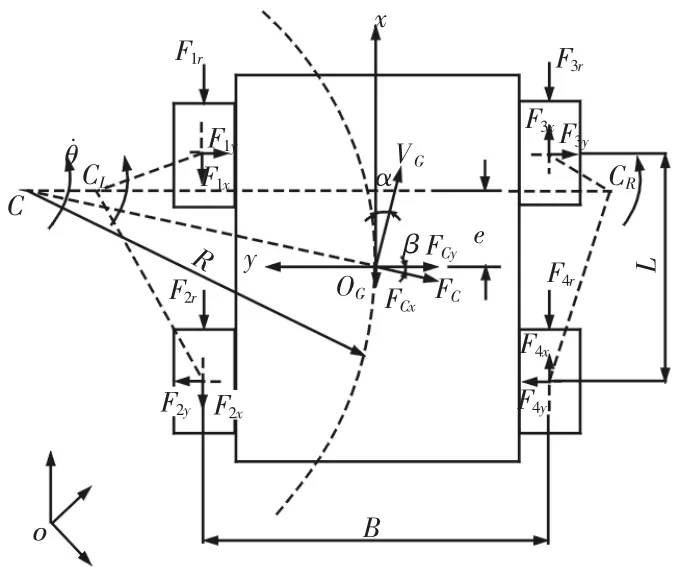
图3 机器人平稳转向受力分析Fig.3 Force Analysis of the Robot for Steady Steering
机器人处于稳态转向运动时,机器人的切向速度为一常量,其切向加速度略去不计。由上述机器人稳态转向运动时的受力分析,如图3所示。建立机器人在车体动坐标系下xy平面的力平衡方程,∑Fx=0、∑Fy=0、∑Fz=0,得:
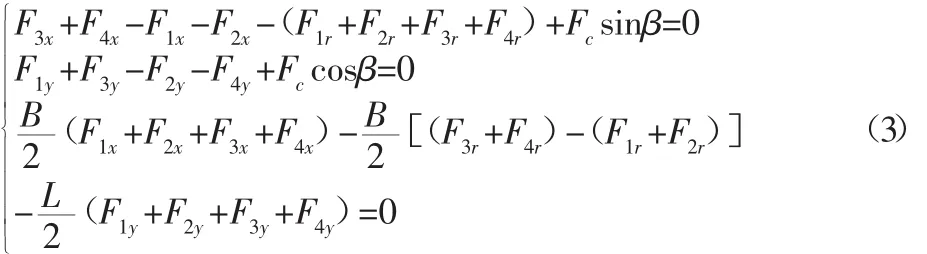
式中:Fc—作用在机器人质心OG处的离心力,Fc=mv2/R;R—瞬时转弯半径。
式(3)中机器人转向时各车轮与地面接触点的纵向作用力对质心点的力矩形成了转向驱动力矩各车轮受到的滚动阻力与侧向力对质心点形成转向阻力矩Mf,Mf=
机器人转向时车轮与地面接触点的侧向力Fiy对质心点的力矩始终表现为阻力矩,转向半径越小,机器人的滑转、滑移现象越严重,其所受到的转向阻力也越大。当移动机器人行驶于硬路面时,通常认为附着系数μi与滑移率λ有关[8],地面附着系数越小,机器人所受到的转向阻力就越小;地面附着系数越大,机器人转向消耗的功率就越多。但地面的附着系数较小时,车轮易打滑和失稳。
4 轨迹跟踪控制
机器人在运动中由于车轮与地面之间相互作用的时变性,其滑动率和地面附着系数等参数很难实时直接检测获得。滑模控制是一种不需要获得被控对象精确数学模型的非线性控制方法,只需要知道模型中参数的变化范围,其对于受不确定动态影响的非线性系统具有较强的控制性能,使系统按照设计好的滑动模态轨迹运动[9]。采用滑模变结构控制的方法,对机器人实现具有位姿pr=[Xr,Yr,θr]T和速度[vr,ωr]T的参考轨迹跟踪。
4.1 轨迹跟踪位姿误差模型
定义机器人参考的位姿为 pr=[Xr,Yr,θr]T,式中:vr—机器人运动的参考速度;ωr—机器人本体绕其几何中心的参考角速度,其满足式(1)的运动学方程。如图1所示,机器人的实际位姿由其质心OG在坐标系O(X,Y,Z)的位置及航向角θ表示,即p=[X,Y,θ]T,若不考虑车轮与地面的滑移,在全局坐标系下,机器人的轨迹跟踪误差方程为:

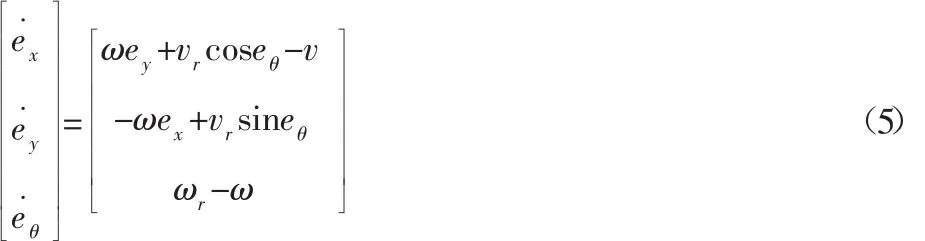
式中:ex、ey、eθ—机器人的纵向误差、侧向误差和方向误差。
令机器人跟踪误差向量为 e=[ex,ey,eθ]T,则其位姿误差微分方程为[6]:
4.2 滑模跟踪控制
为了提高趋近阶段的动态品质,有效减弱滑模控制中的抖振现象,并且使机器人从任意初始位置快速平滑的趋近滑模面,选取指数趋近律以及幂次趋近律的组合作为趋近函数:

式中:ε>0,k1>0,k2>0,0<a<1。
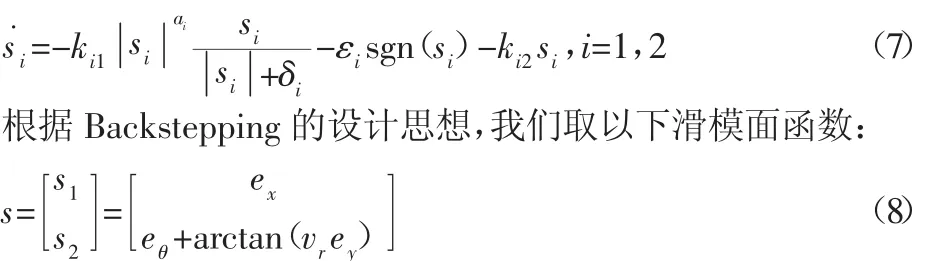
使 s1→0,s2→0,就能实现 ex收敛到零,且 eθ收敛到-arctan(vrey),从而实现 ey→0,eθ→0。
令 α=arctan(vrey),由式(5)、式(7)和式(8)得:
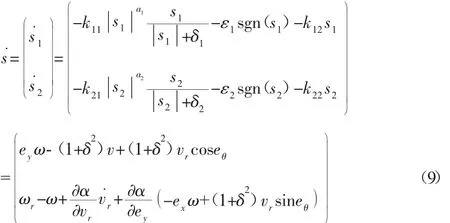
经整理,得到控制律为:
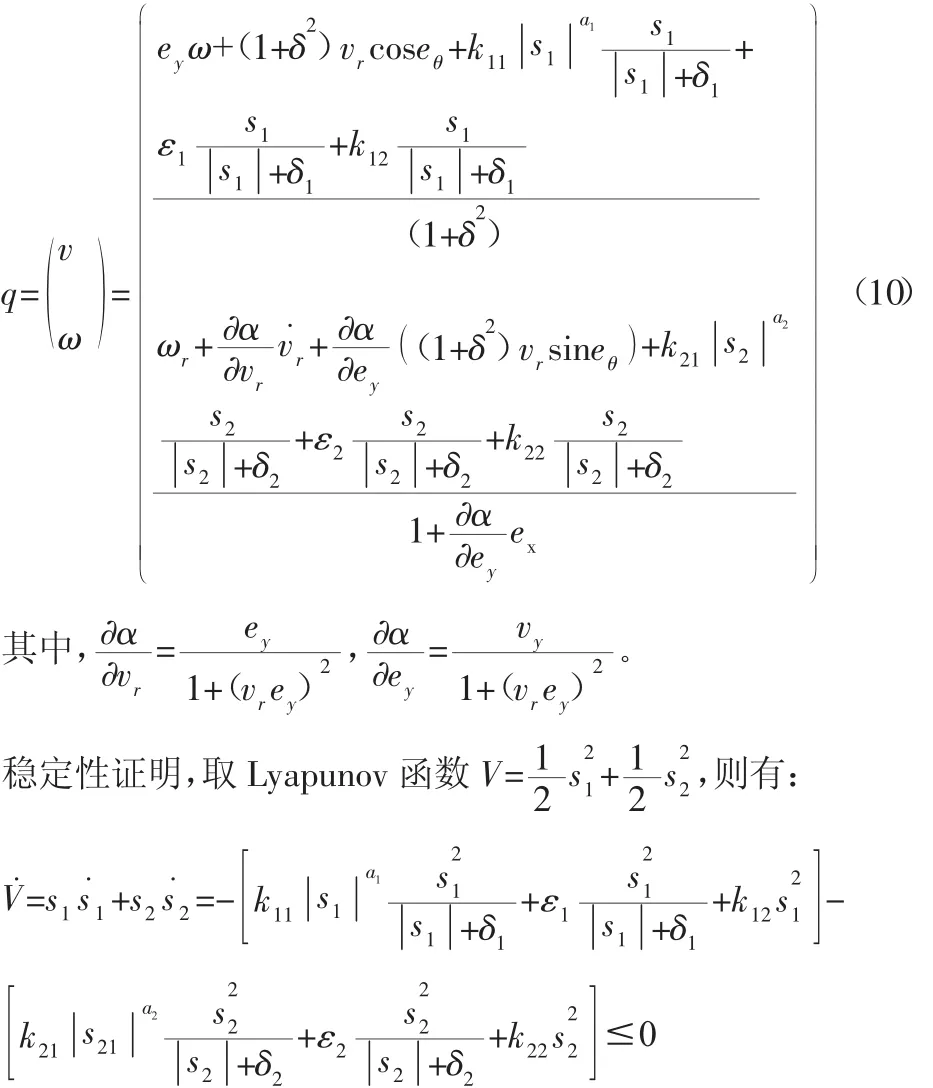
因此,可以看出系统是稳定的。
5 仿真分析
为验证所提出的滑模控制方法的有效性,选择直线与圆形两种参考轨迹路径进行跟踪控制。仿真时控制器中的参数如下:k11=0.5,k12=1.4,k21=0.5,k22=1.4,ε1=0.03,ε2=0.03,a1=0.4,a2=0.5,δ=0。
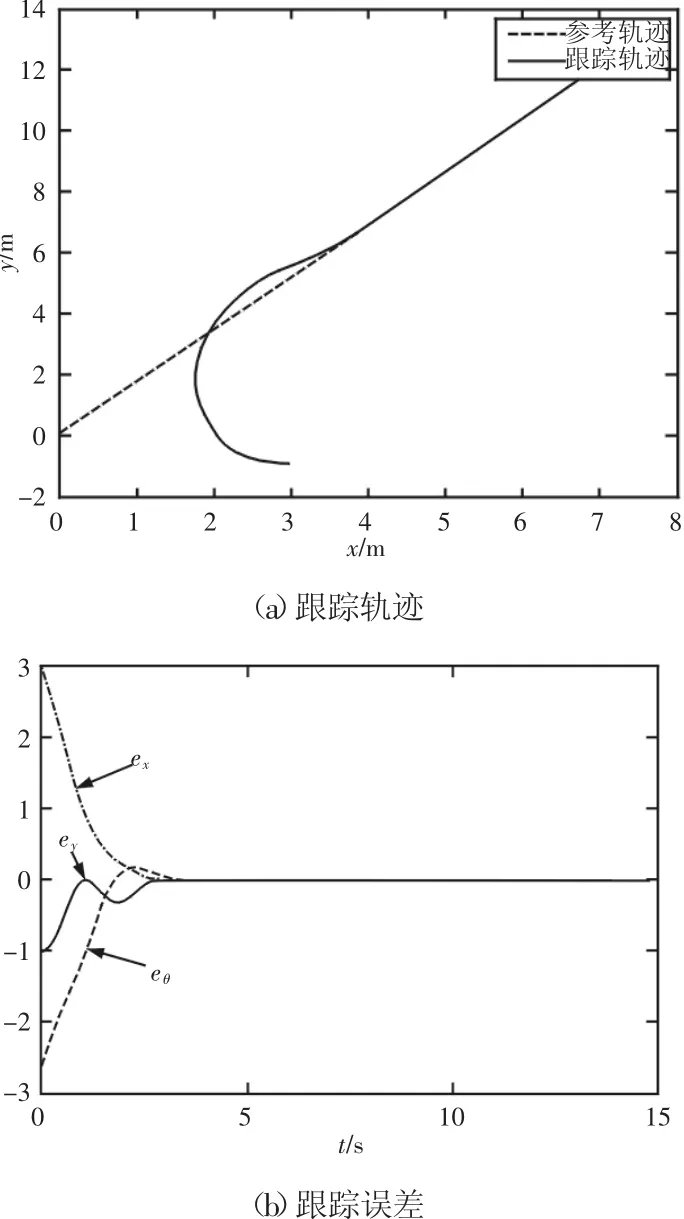
图4 直线轨迹仿真结果Fig.4 The Simulation Result of Straight Line Trajectory
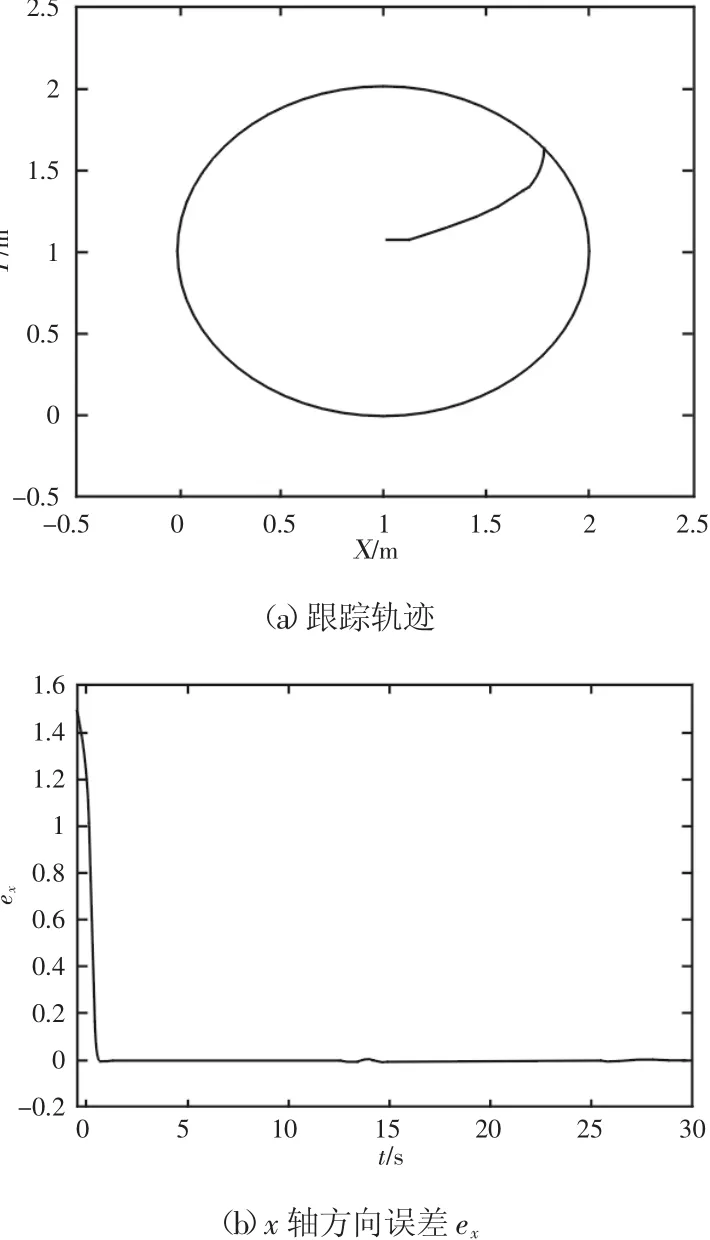
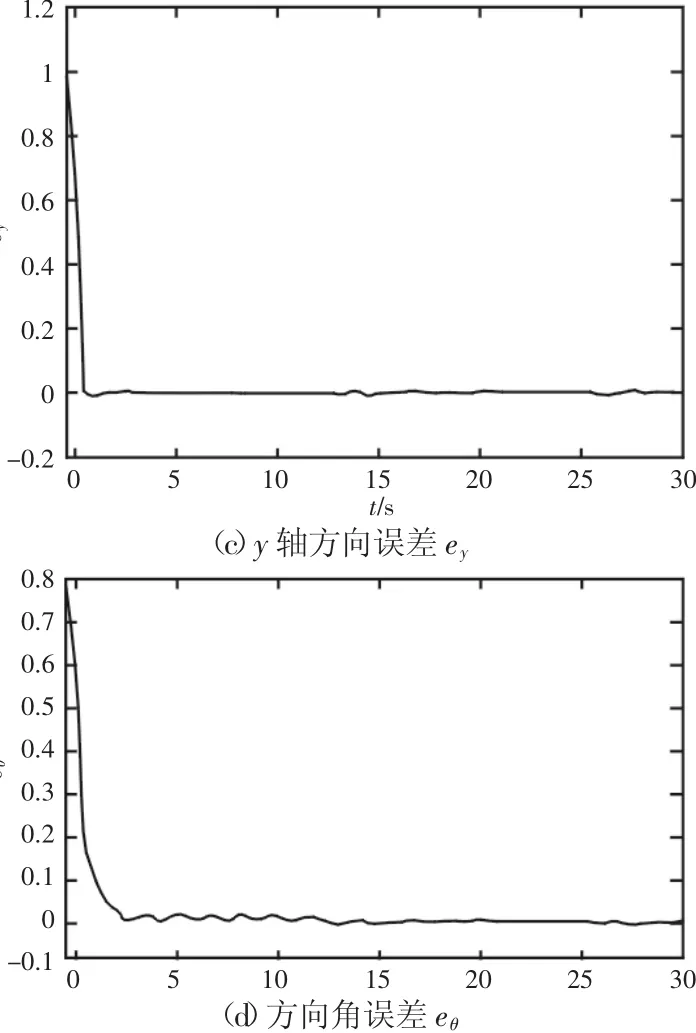
图5 圆形轨迹仿真结果Fig.5 The Simulation Result of Circular Trajectory
6 结论
(1)机器人在滑移转向过程中,轮胎在纵向滑转的同时,会伴有侧向的变形和滑动。转向半径越小,机器人车轮的滑转、滑移现象越严重,机器人受到的转向阻力也越大。(2)采用滑模变结构的控制方法对滑移转向机器人进行轨迹跟踪,设计了一种将指数趋近律和幂次趋近律相结合的趋近律函数,并利用Lyapunov函数证明了系统的稳定性。对直线和圆形两种参考轨迹进行跟踪控制仿真,结果表明机器人能平稳、快速地跟踪期望轨迹,验证了该滑模控制方法的有效性和可行性。