基于自适应逆控制的逆信道估计
2018-11-01毕剑峰张振
毕剑峰 张振
摘要:针对无线多径衰落信道,为补偿信道对信号的影响,提出基于自适应逆控制的逆信道估计算法。该算法先使用可变遗忘因子(VFF)的最小二乘(RLS)算法对信道进行估计,然后采用离线方式用归一化变步长最小均方(MNLMS)算法对信道的逆建模估计,用估计的逆信道做控制器来抵消信道对信号的影响。仿真结果表明,在相同信噪比下,基于自适应逆控制的逆信道估计算法与自适应均衡相比,具有更好的性能。
关键词:逆信道估计;信道估计;自适应逆控制
中图分类号:TP393 文献标识码:A 文章编号:1009-3044(2018)19-0175-03
无线通信中,无线信号受环境、距离、传播路径的不确定性等影响,会产生多径和衰落现象,影响系统性能。为抵抗无线信道的多径和衰落问题,如果能对信道的逆即逆信道进行准确的估计,就可以将AWGN多径衰落信道转化为AWGN信道。对逆信道的估计现有的方法一般使用自适应均衡器[1]。自适应均衡器一般都是直接对逆信道进行估计,因为噪声的存在,直接对逆信道估计会使信道的逆估计偏离真实值。在信噪比较高时,因为噪声较小,逆信道的偏移较小,对系统的性能影响较小。在信噪比较低时,因为噪声造成的逆信道估计偏离真实值较大,严重影响系统性能。
自适应逆控制理论是B.Widrow在20世纪80年代提出,其基本思路为先对未知对象直接建模,然后用逆对象的模型来控制对象的动态特性[1]。自适应逆控制本质就是借助于自适应滤波技术建立一种简单的、鲁棒的、精确的求逆自适应控制形式[2]。
本文从无线信道的模型出发,针对有噪信道,提出一种基于自适应逆控制的逆信道估计算法,使用Matlab对此算法仿真分析,仿真结果表明,该算法对有噪信道的逆估计可以减小因噪声的存在对信道逆估计的偏离。
1 信道模型
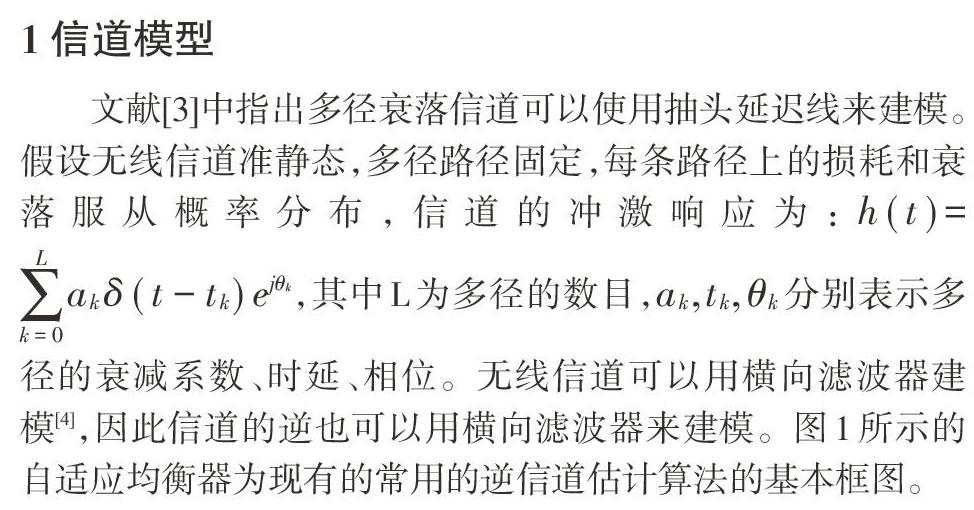
文献[3]中指出多径衰落信道可以使用抽头延迟线来建模。假设无线信道准静态,多径路径固定,每条路径上的损耗和衰落服从概率分布,信道的冲激响应为:[h(t)=k=0Lakδ(t-tk)ejθk],其中L为多径的数目,[ak,tk,θk]分别表示多径的衰减系数、时延、相位。无线信道可以用横向滤波器建模[4],因此信道的逆也可以用横向滤波器来建模。图1所示的自适应均衡器为现有的常用的逆信道估计算法的基本框图。
为了减小因噪声产生的偏离,本文提出一种新的算法,基于自适应逆控制理论的逆信道估计算法,其核心思想是先对信道进行估计,然后离线估计信道的逆,用信道的逆估计做控制器来补偿信道。
2 基于自适应逆控制的逆信道估计算法
直接对逆信道估计会受噪声影响,因此分三步估计信道的逆:
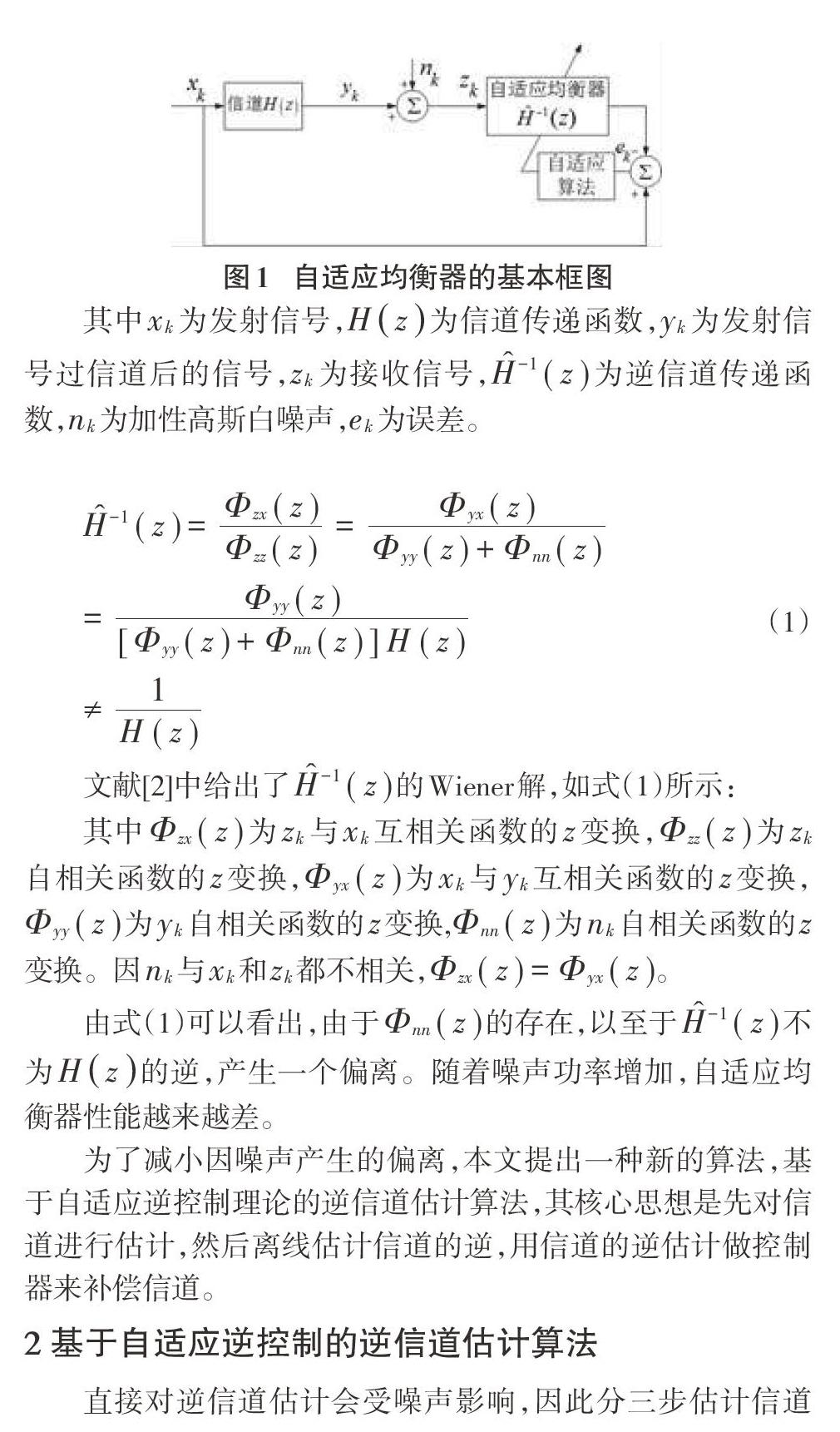
2.1 对信道的估计
信道估计的基本框图如图2所示。
2.2 對信道的逆估计
信道的逆是否稳定决定于信道的传递函数是否是最小相位的。为了获得一个稳定的信道的逆,分两种情况:
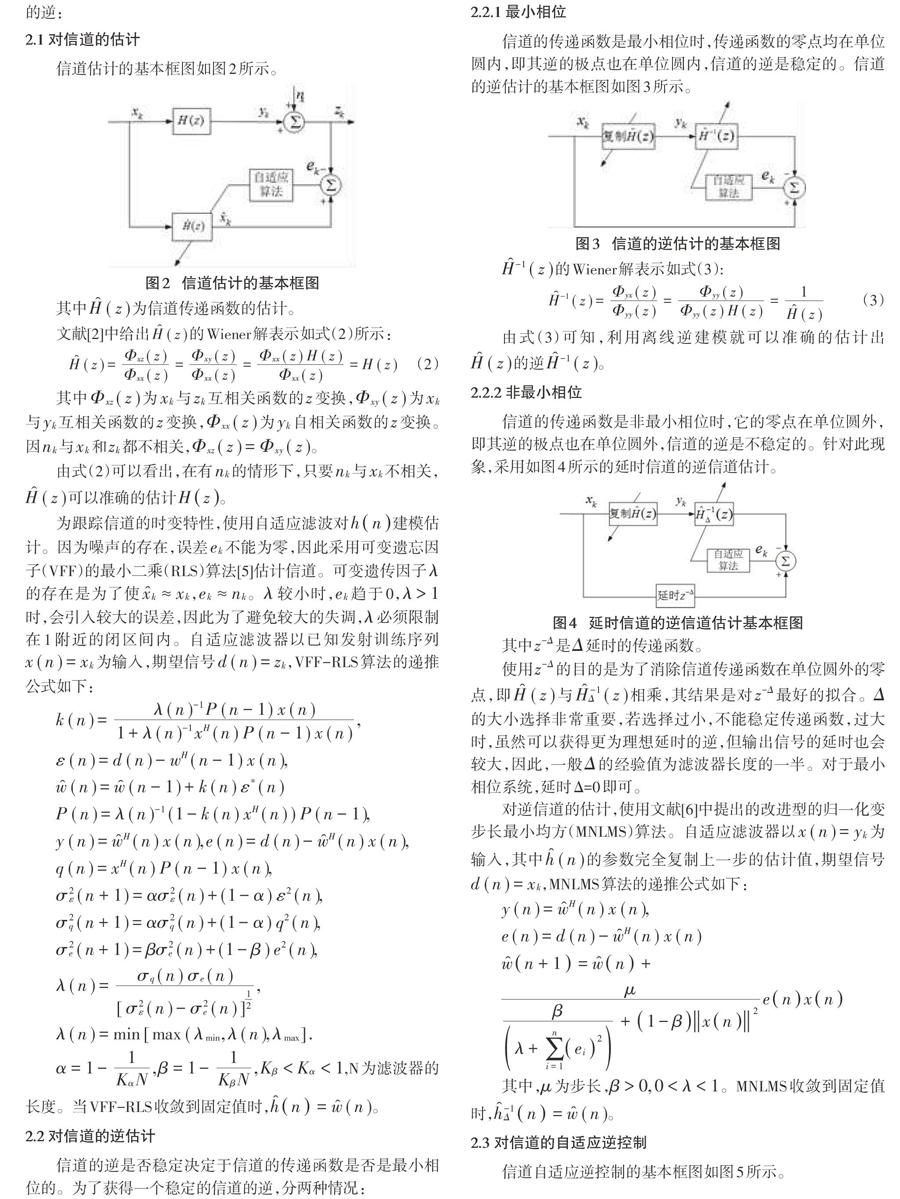
2.2.1 最小相位
信道的传递函数是最小相位时,传递函数的零点均在单位圆内,即其逆的极点也在单位圆内,信道的逆是稳定的。信道的逆估计的基本框图如图3所示。
由式(3)可知,利用离线逆建模就可以准确的估计出[H(z)]的逆[H-1(z)]。
2.2.2 非最小相位
信道的传递函数是非最小相位时,它的零点在单位圆外,即其逆的极点也在单位圆外,信道的逆是不稳定的。针对此现象,采用如图4所示的延时信道的逆信道估计。
其中[z-Δ]是[Δ]延时的传递函数。
使用[z-Δ]的目的是为了消除信道传递函数在单位圆外的零点,即[H(z)]与[H-1Δ(z)]相乘,其结果是对[z-Δ]最好的拟合。[Δ]的大小选择非常重要,若选择过小,不能稳定传递函数,过大时,虽然可以获得更为理想延时的逆,但输出信号的延时也会较大,因此,一般[Δ]的经验值为滤波器长度的一半。对于最小相位系统,延时Δ=0即可。
对逆信道的估计,使用文献[6]中提出的改进型的归一化变步长最小均方(MNLMS)算法。自适应滤波器以[x(n)=yk]为输入,其中[h(n)]的参数完全复制上一步的估计值,期望信号[d(n)=xk],MNLMS算法的递推公式如下:
[y(n)=wH(n)x(n),e(n)=d(n)-wH(n)x(n)wn+1=wn+μβλ+i=1nei2+1-βxn2enxn]
其中,[μ]为步长,[β>0,0<λ<1]。MNLMS收敛到固定值时,[h-1Δn=w(n)]。
2.3 对信道的自适应逆控制
信道自适应逆控制的基本框图如图5所示。
得到信道的逆估计[h-1Δn]后,将其作为控制器串联在接收端的前端,即可补偿信道对信号的影响。
4 仿真结果
仿真参数设置如下:采用QPSK调制,信号的符号速率2.5 Mbps,过采样率为16,成形和匹配滤波滚降系数0.35,信道冲激响应[hn=0.6708 0.5 0.3873 0.3162 0.2236],信道噪声为加性高斯白噪声。信道的估计采用VFF-RLS算法,[Kα=0.5],[Kβ=0.05],[λmin=0.9965],[λmax=0.999999]。信道的逆估计和自适应均衡算法采用MNLMS算法,[μ=0.2],[β=0.8,λ=0.4]。
图6是在SNR=0db的情况下,分别使用自适应逆控制和自适应均衡对逆信道进行估计,将没有噪声的接收信号分别过逆信道估计器后的信号与发送信号的误差图。由图可知,接收信号过自适应逆控制估计的信道逆滤波器比过自适应均衡器的信号更接近发送信号,更好的补偿了信道对信号的影响。
图7和图8分别是在SNR=0db和SNR=20db的情况下,分别使用自适应逆控制和自适应均衡对逆信道进行估计,得到逆信道估计后,信道与逆信道联合的频率响应。理想情况下,信道与逆信道串联的系统为全通系统,由图可知,相同信噪比下,使用自适应逆控制对逆信道估计后与信道串联的系统接近全通系统,比使用自适应均衡算法对逆信道估计的带宽要宽,带内平坦度要好,相位基本线性。随着信噪比下降,使用自适应均衡算法对信道的逆估计的性能逐渐恶化,而使用自适应逆控制算法对信道进行逆估计的性能影响不大。
图9是在不同信噪比下系统的误码率,可以看出,使用基于自适应逆控制的逆信道估计算法比自适应均衡算法在相同信噪比时的误码率要低。
5 结束语
本文研究了无线通信中多径衰落信道的逆信道估计问题,提出了基于自适应逆控制的逆信道估计算法,通过理论分析此算法可抑制噪声对逆信道估计的影响,并对此算法进行了建模仿真与分析。与传统的自适应均衡算法相比,本算法受噪声的影响小,能更加准确的估计出信道的逆,在相同信噪比下,有更低的误码率。
参考文献:
[1] Chen T, Zakharov Y V, Liu C. Low-Complexity Channel-Estimate Based Adaptive Linear Equalizer[J].Signal Processing Letters, IEEE, 2011, 18(7): 427-430.
[2] B. Widrow, E. Walach.自适应逆控制[M]. 西安交通大学出版社,2000.1-3,47,75,101.
[3] 靳翼.变步长LMS自适应均衡算法研究及其在DSP上的实现[D].成都:电子科技大学,2010.11.
[4] 何平,徐炳祥,张辉,等.时变衰落信道下的自适应均衡技术[J].电子学报,1993(4):85-89.
[5] 田文科,王剑,山秀明.PCMA自适应自干扰对消算法与仿真[J].电讯技术,2011(9):78-82.
[6] 韩华,罗安.NLMS算法的改进及其在自适应逆控制中的仿真研究[J].测控技术,2008(5):74-77.
