串列桥墩绕流对行进船舶受力的影响研究
2018-10-11牛国杰刘晓平叶玉康李安斌
牛国杰, 刘晓平, 叶玉康, 李安斌
(长沙理工大学 水利工程学院,湖南 长沙 410114)
船舶驶经桥墩时,桥墩周围出现的紊动流场而对船舶水动力造成干扰,引起船舶产生横漂、旋转运动,诱发船舶撞桥海损事故。如何保障桥区船舶通航安全已成为该领域学者们研究的重点。一些学者[1-3]研究了桥墩周围的紊动流场,给出桥墩与航道边线安全距离,并用于指导桥区航线规划。然而,在船舶与桥墩交汇运动过程中,船舶与桥墩两者间存在着水动力的相互作用,仅仅考虑桥墩周围的紊流场分布难以体现船舶运动状态以及船舶与桥墩交汇过程的安全性。Kijima[4]应用细长体理论,研究了2艘同型船舶在桥墩旁追越过程中两船间水动力的相互作用规律。徐言民[5]等人视桥墩为绝对静止的船舶,采用船间水动力干扰通用模型计算船舶上、下行经过桥墩时的船舶与桥墩之间相互干扰的水动力。张晨曦[6-7]等人基于CFD软件中的FLUENT软件,模拟在桥墩邻域直线航行船舶的粘性流场,分析了作用于船体上的横向力和转艏力矩历时变化规律。乾东岳[8-10]等人采用物理模型试验,对船舶经过桥墩过程的受力情况进行了测量。目前,这些研究集中于单桥墩和船舶沿直线经过桥墩情况,但无法真实地反映船、桥交汇过程中船舶的航行姿态、水动力状态。因此,作者拟在物理模型试验的基础上,考虑船舶与桥墩绕流的耦合作用,对船舶与桥墩间的水动力相互作用进行研究。
1 物理模型试验
1.1 试验概况
本物理模型试验在长沙理工大学水利实验中心的概化水槽(35 m×3.5 m×1.2 m)中进行,选用1∶50的正态比尺,原型桥墩直径为5.0 m,船舶500 吨级驳船(45.0 m×10.8 m×1.6 m)。定义:T为船体舷侧外板与桥墩壁面间距;L为两桥墩中心间距;D为桥墩直径;U为水流速度。采用静水相对实验,将扭矩传感器安装于船舶模型的重心上,并通过一根刚性支杆将固定支架与扭矩传感器相连,桥墩模型固定在滑动平台车下,平台车在三相电磁调速电机的带动下沿水槽顶圆形钢管轨道匀速滑动,同时,采用扭矩传感器测量船舶模型的艏摇力矩沿程变化情况。该模型的平面布置如图1所示。
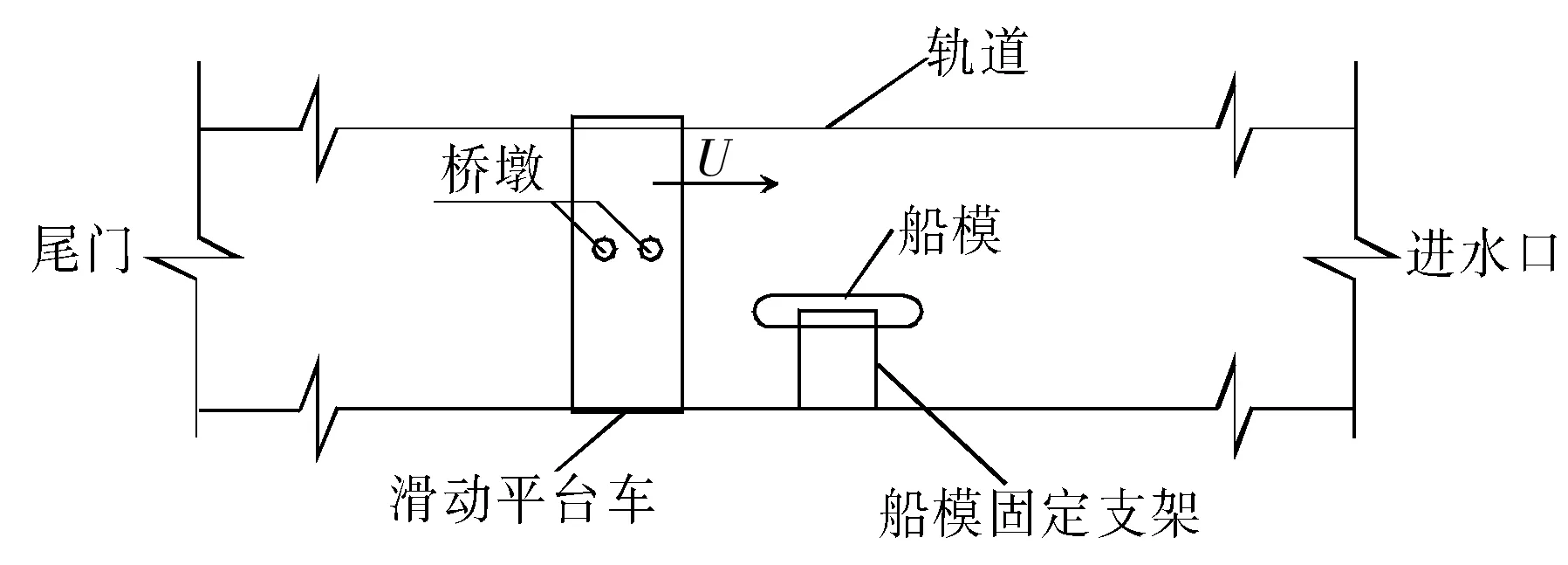
图1 模型平面布置示意Fig. 1 The layout of the model plane
1.2 试验结果分析
船舶艏摇力矩历时曲线如图2所示。在图2中,横坐标为船艏与桥墩中心的纵向距离,桥墩中心处x=0 m,负值表示船舶位于桥墩上游,模型中船长为0.9 m。图2(a)给出了在水流速度U=0.283 m/s时,单桥墩下,船与桥横向间距不同时的艏摇力矩历时曲线。图2(b)给出了以船与桥的横向间距为0.5D、两桥墩中心间距不同时的艏摇力矩历时曲线。
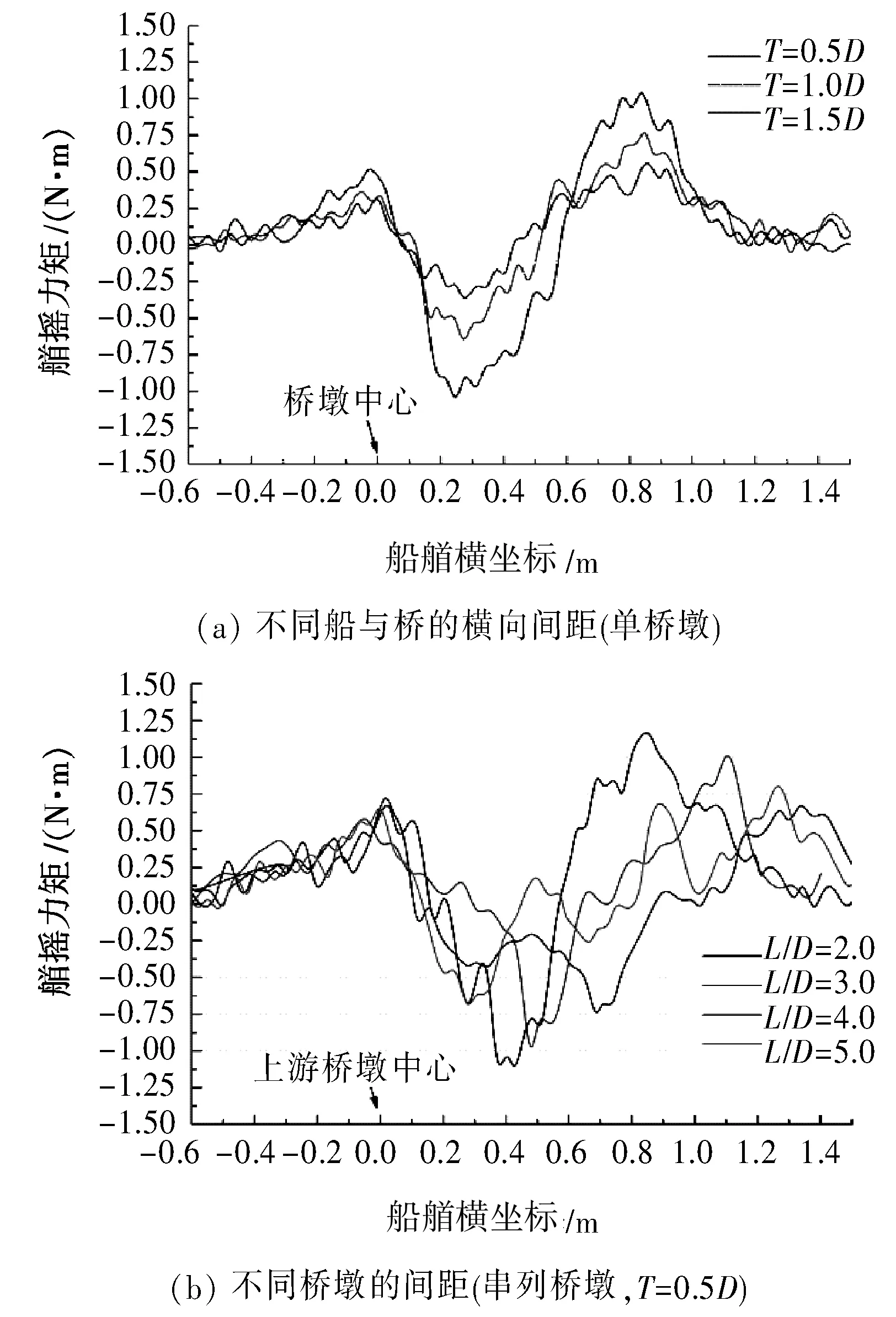
图2 船舶艏摇力矩历时曲线Fig. 2 Ship's rolling moment curve
从图2(a)中可以看出,船舶下行经过桥墩过程中,艏摇力矩呈正峰值→负峰值→正峰值的规律演进,且存在一定的波动。船舶以不同的船、桥横向间距下行,艏摇力矩演进规律具有一致性。且随着船、桥横向间距的增加,艏摇力矩峰值减小。从图2(b)中可以看出,对比单桥墩与串列桥墩工况,第一个艏摇力矩正峰值形成的位置相同,均为船艏到达上游桥墩时的位置。在桥墩间距为2.0D和3.0D时,船舶艏摇力矩演进规律与单桥墩工况类似,经历着正峰值→负峰值→正峰值的变化过程,但负峰值与第二个正峰值出现的时刻有所差异。当桥墩间距为4.0D和5.0D时,艏摇力矩开始呈现复杂的波动过程,在第一个正峰值和最后一个正峰值之间还存在多个小幅波动。将单桥墩与不同桥墩间距的串列桥墩艏摇力矩峰值的大小进行对比发现,串列桥墩的第一个艏摇力矩正峰值均较单桥墩的大。随着桥墩间距的增加,最大艏摇力矩负峰值和最后艏摇力矩正峰值减小。
2 数学模型的建立及验证
本研究应用CFD中的FLUENT软件,采用粘性流求解方法,模拟两船舶会遇、追越、靠泊及经过桥墩和岸壁时的非定常粘性流场,捕捉船舶行进过程中船舶与其他障碍物周围的复杂流场细节,对船、桥交汇运动进行二维数值模拟研究,揭示其中的水动力学机理。
2.1 模型尺寸及边界条件
船舶、桥墩数学模型的参数和几何比尺与其物理模型的一致。经过数值计算比选后,确定计算域为80D×20D。船舶在距进口10D处释放,保证船体与桥墩有较远的初始距离,船体中轴线位于模型水平中心线上。上游桥墩中心距进口40D,与物理模型一致。采用速度进口和压力出口边界条件,将两侧壁面设定为对称边界,船体和桥墩表面设置为无滑移壁面边界。计算域范围如图3所示。
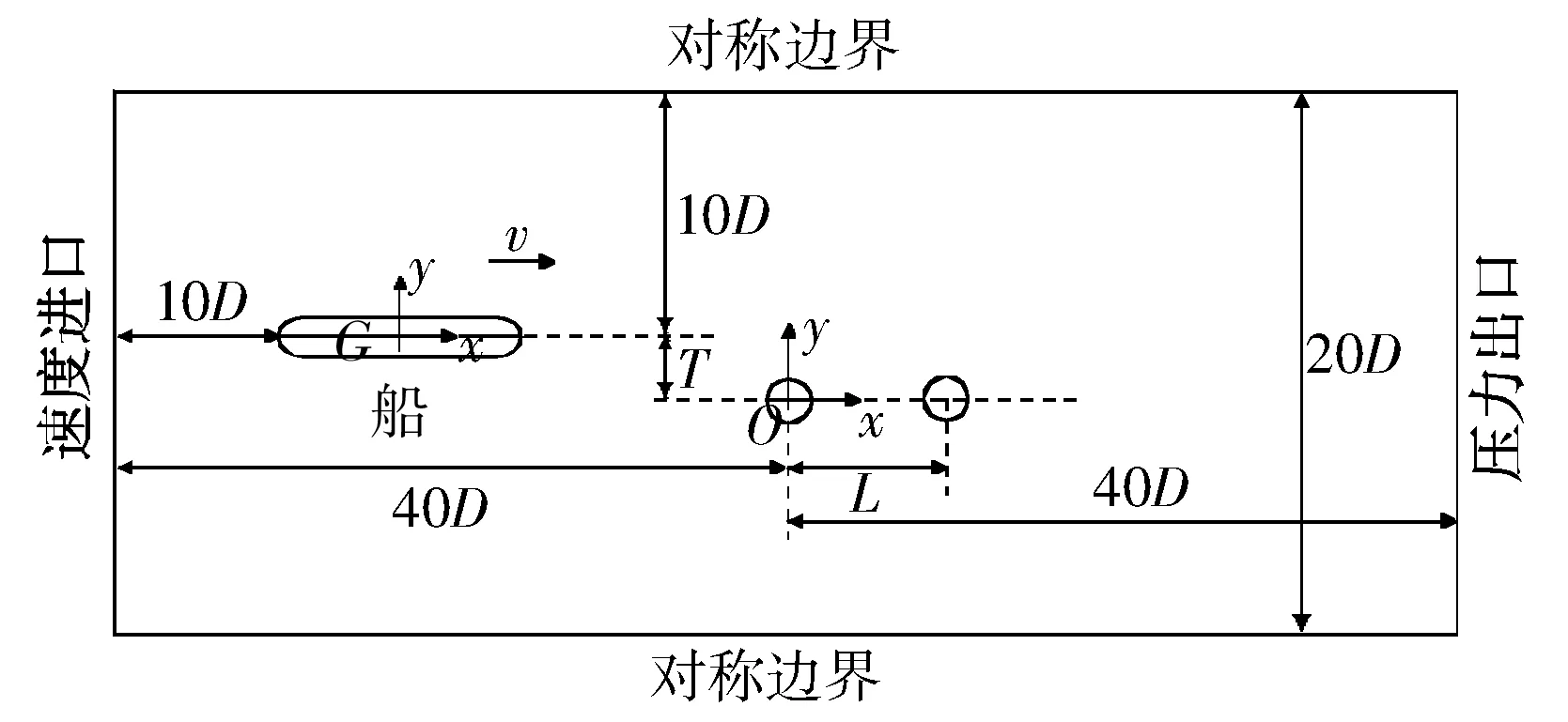
图3 计算域的尺寸和边界条件Fig. 3 Computational domain size and boundary conditions
2.2 控制方程
RNGk-ε模型可处理带旋流及流线有较大畸变的流动[11]。本研究选取RNGk-ε模型进行串列桥墩绕流模拟和行进船舶周围流场模拟。因此,在进行数值计算时,除满足连续性方程和N-S方程外,还需满足RNGk-ε模型的湍流动能k和湍流动能耗散率ε方程。
2.3 数值方法
2.3.1 网格划分
把桥区船舶二维平面运动简化为1个三自由度问题(即沿X轴方向的纵向移动、横漂及船体绕Z轴的转动)。运动船体位移的尺寸远大于网格的尺寸,易致使网格畸变率过大而导致计算不收敛,因此选择弹性光顺模型与局部重构模型进行网格更新。为减少动网格更新时间,节约计算时间,采用多区域计算模型,如图4所示。只将船宽外一定宽度范围划分为动网格区域,除船体边界层网格使用四边形网格外,均采用三角形非结构网格,其他区域设定为静止网格区域,采用四边形结构化网格,动网格区域与静止网格区域之间采用交界面连接,实现数据传递。
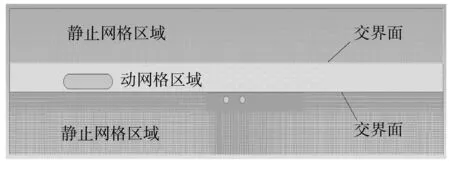
图4 动网格区域划分示意Fig. 4 Division diagram of the dynamic grid area
2.3.2 用户自定义函数UDF的使用
为模拟船舶受桥墩紊流影响后的受力和运动情况,需采用动网格,将力转化为速度和位移。本试验采用用户自定义函数UDF中的动网格宏“DEFINE_CG_MOTION”定义船舶在每一个时间步上的线速度及角速度来指定船舶运动,并通过“Compute_Force_And_Moment”宏获取每1个时间步船体受力,以此计算下一时间步船体重心速度、角速度及重心位置,可实现水流与船舶运动的耦合。
2.4 模型验证
2.4.1 绕流流场特性验证
串列桥墩绕流流场(L/D=4.0)如图5所示。将PIV(粒子图像测速法)物理模型试验观测的墩后尾流流场(如图5(a)所示)与数学模型计算得到的墩后尾流流场(如图5(b)所示)进行对比发现,数学模型计算的结果与物理模型试验的结果吻合得较好。在L/D=4.0间距下,两者的上、下游桥墩均有涡体脱落,涡体位置和大小分布规律相似,上游圆柱分离剪切层在下游圆柱重新附着位置相同。表明:流场的数学模型计算结果能很好地与PIV物理模型试验结果相吻合,得到合理的数值解。因此,该数学模型的网格和方法能够满足数值计算要求。
2.4.2 绕流水力特征参数验证
圆柱绕流的重要参数有雷诺数Re、阻力系数CD、升力系数CL及斯特劳哈尔数St。本研究中均取Re=3.16×104,将计算得到的各参数与已有研究成果进行比较(见表1)。从表1中可以看出,本计算结果与其他研究数据[12-13]吻合得较好。

图5 串列桥墩绕流流场(L/D=4.0)Fig. 5 Flow field diagram of bridge piers (L/D=4.0)
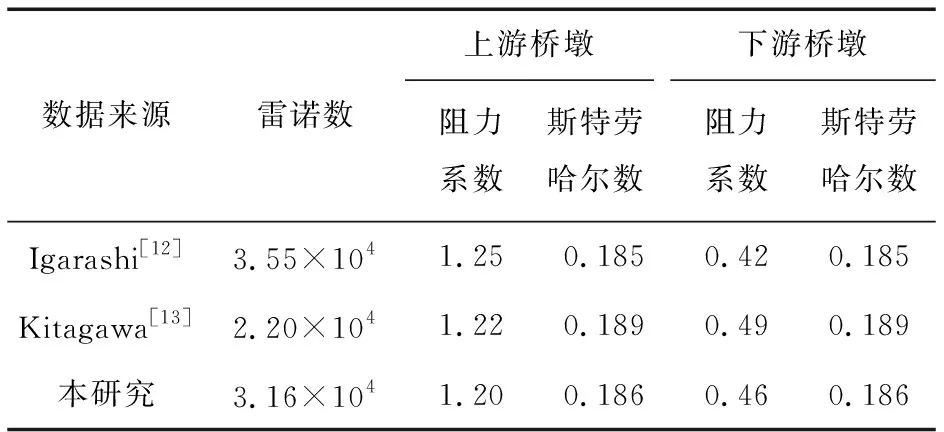
数据来源雷诺数上游桥墩阻力系数斯特劳哈尔数下游桥墩阻力系数斯特劳哈尔数Igarashi[12]3.55×1041.250.1850.420.185Kitagawa[13]2.20×1041.220.1890.490.189本研究3.16×1041.200.1860.460.186
2.4.3 船舶受力特性验证
建立与物理模型试验相对应的计算工况,对数学模型船舶的受力进行验证。计算工况为:T=0.5D,U=0.283 m/s,L/D=3.0及单桥墩情况。单桥墩和串列桥墩物理模型测量值与数值模拟计算值的结果对比如图6所示。从图6中可以看出,两工况的演进规律吻合得较好。由于物理模型力矩传感器的数据采样频率限制和桥墩周围自由液面变化的影响,艏摇力矩的测量值与计算值存在着一定的偏差,但数值模拟结果总体能够反映船、桥交汇过程中船体所受艏摇力矩的变化规律。
3 数值计算结果分析
3.1 计算工况
考虑汛期急流最不利工况,同时,根据学者桥区船舶航行安全航速的研究成果和海事部门的相关规定,取水流速度2.0 m/s,船舶速度2.5 m/s,船、桥横向间距T=0.5D,分别计算单桥墩和两桥墩中心间距(L=2.0D,3.0D,4.0D,5.0D,9.0D和13.0D)时船舶经过桥墩沿程所受的艏摇力矩。

图6 艏摇力矩的测量值与计算值的对比Fig. 6 Comparison between the measurement value and the calculated value of the shaking moment
3.2 船舶周围压力场分析
船、桥交汇过程不同时刻的压力云图如图7所示。暖色云图为正压,冷色云图为负压。本研究选择几个典型位置进行分析。如图7(a)所示,船体接近桥墩过程中,船体右前端伴流斜向桥墩运动。同时,由于船体边界的靠近,抑制了墩前驻点周围流线的发展,船与桥间水体不断受到挤压,加之墩前方推船流的共同作用,使得船体右舷前端的压力大于左舷的,船艏受排斥,远离桥墩,航向改变。在船艏即将到达桥墩时,船与桥之间的流道最窄,排斥力最大,艏摇力矩达到一个正峰值。当船艏进入桥墩尾流区、船尾仍位于桥墩上游时,桥墩上游船体边界依然挤压船与桥之间的水体,如图7(b)所示,桥墩上游船体右舷侧受正压作用,推离桥墩。受船艏部分伴流的带动,让水流出船与桥之间的流道后,加速向墩后扩散,加剧了尾涡的发展,较无船舶时的墩后负压区增加。墩下游船身右舷侧在负压作用下,船艏吸向桥墩侧。由于船体右舷侧船艏受吸引,船尾受排斥,对船体形成顺时针力矩,艏摇力矩表现为负值。
船尾远离桥墩过程中,部分尾涡撞击船体后或吸附于船体,或与周围涡体发生更强烈的混参。同时,在船尾伴流的带动下,加速了船尾与桥墩间流道水流,因而墩后方负压区域发展更加显著。船尾右舷侧处于负压区内,形成艏摇力矩正峰值。
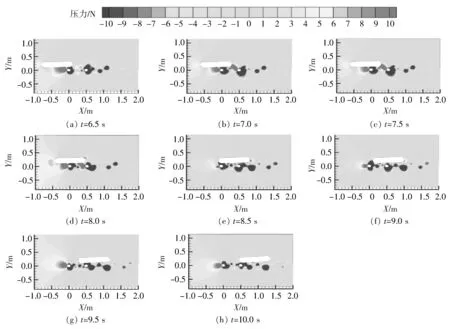
图7 L/D=5.0船桥交会不同时刻的压力云图Fig. 7 Pressure cloud diagram at different times of bridge crossing when L/D=5.0
3.3 船舶受力分析
不同桥墩间距下,船舶经过桥墩沿程所受艏摇力矩如图8所示。从图8中可以看出,经过单桥墩及不同桥墩间距下的串列桥墩船舶艏摇力矩变化过程具有一定差异:在桥墩中心间距L/D=2.0时,艏摇力矩曲线演进规律与单桥墩时的较为一致,均以正峰值→负峰值→正峰值规律演进,峰值出现相对位置也相同;当L/D≥3.0后,力矩曲线呈多个正负峰值交替出现,其中,第一个正峰值及最后一个正峰值出现的相对位置相同。从图7中可以看出,由于沿船体右舷交替分布着正、负压力区,且随着船体的下行,船体各位置上的压力区大小和强度实时变化,因此,介于第一正峰值与最后正峰值之间,不同的船桥横向间距L/D,会使艏摇力矩呈现不同的波动情况。
艏摇力矩峰值与不同桥墩间距L/D的关系 曲线如图9所示。从图9中可以看出,串列桥墩的第一个艏摇力矩正峰值均大于单桥墩的。随着桥墩间距的增加,峰值逐渐减小。表明:随着桥墩间距的增加,下游桥墩对上游桥墩的影响逐渐减弱,趋于2个孤立的单墩状态;串列桥墩最后一个艏摇力矩正峰值随桥墩间距的增加而减小。在2.0≤L/D≤3.0时,串列桥墩的艏摇力矩峰值大于单桥墩的;而当4.0≤L/D≤5.0时,串列桥墩的艏摇力矩峰值小于单桥墩的。因此,当串列桥墩间距L/D≤3.0时,上、下游桥墩的相互作用会对船舶安全航行带来不利影响。特别是在L/D=2.0时,串列桥墩第一个艏摇力矩正峰值达到了单桥墩的1.87倍。当L/D=3.0时,串列桥墩艏摇力矩负峰值相比单桥墩的增加了45%。随着间距的继续增加,串列桥墩对船舶水动力的干扰逐渐趋于单桥墩的。但在串列桥墩间距达5.0D时,部分力矩峰值比单桥墩的更低。

图8 不同L/D下的船舶艏摇力矩Fig. 8 Ship’s shaking moments at different L/D
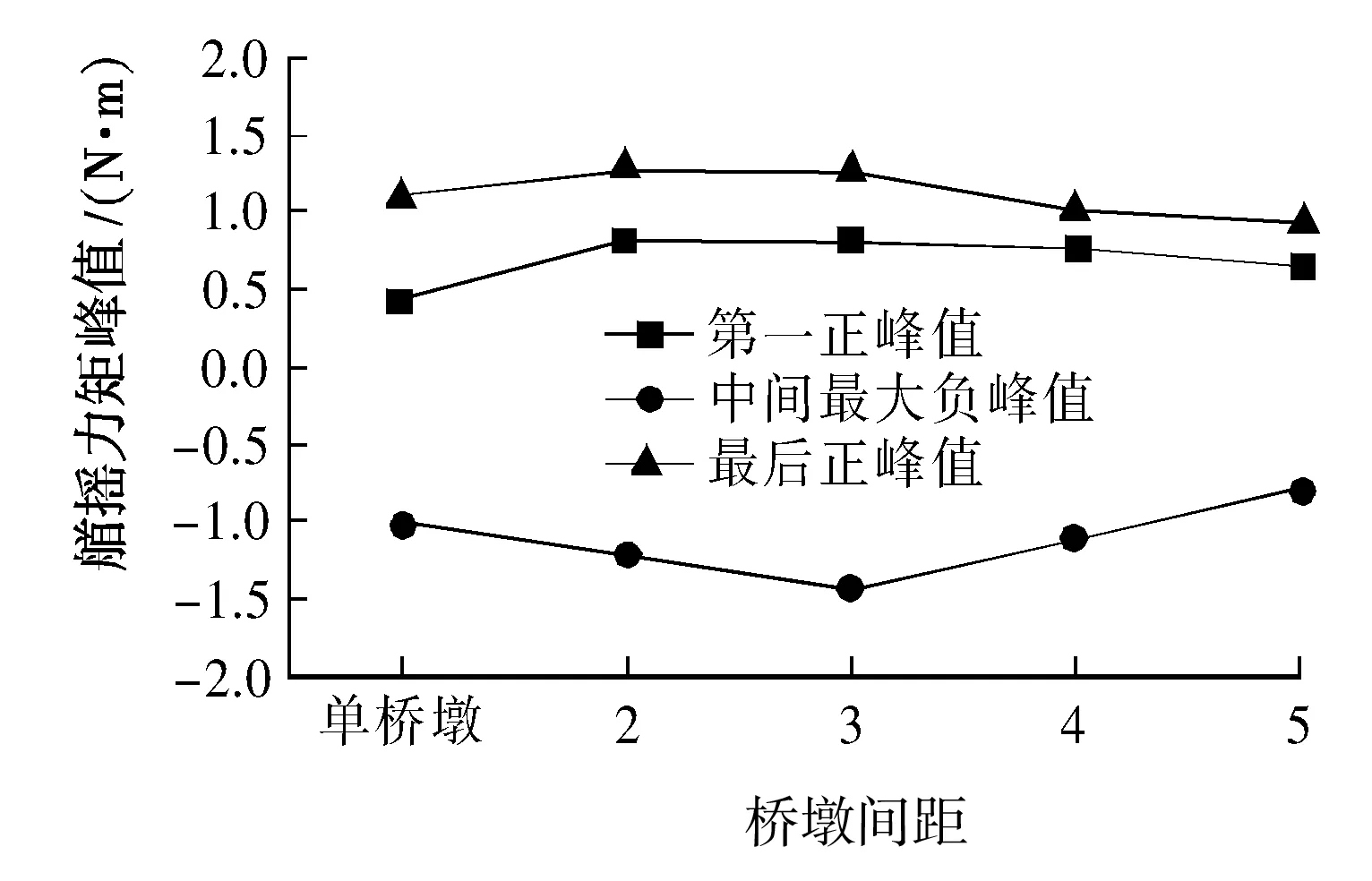
图9 艏摇力矩峰值与桥墩间距关系曲线Fig. 9 The relationship between the peak moment of shaking torque and pier spacing
研究两桥墩间距达到何值时,开始类似于单桥墩情况是非常必要的。通过计算发现,两桥墩间距L/D≥9.0后,船舶通过上游桥墩过程中,船舶艏摇力矩曲线与单桥墩的十分贴合,如图10所示。表明:下游桥墩对上游桥墩的水动力不构成干扰。对于L/D=9.0工况,在船尾离开上游桥墩时,达到串列桥墩的艏摇力矩正峰值(M=1.778 N·m)却比单桥墩的大得多,约为单桥墩的1.6倍。这是由于此处船长恰好等于桥墩间距,此时船尾将离开上游桥墩而船艏恰好到达下游桥墩,形成的力矩峰值为上游桥墩对船舶的最后正峰值与下游桥墩对船舶第一个正峰值的叠加。观察L/D=13.0的串列桥墩艏摇力矩曲线发现,船舶经过下游桥墩相当于复演了经过上游桥墩的过程,2个过程形成的艏摇力矩曲线一致且与单桥墩吻合度较高。表明:桥墩间距达13.0D后,串列桥墩对船舶水动力的干扰等同于2个孤立的单桥墩。
4 结论
本研究分析了不同桥墩间距下船、桥交汇过程中船舶沿程所受艏摇力矩演进规律,得出的结论为:
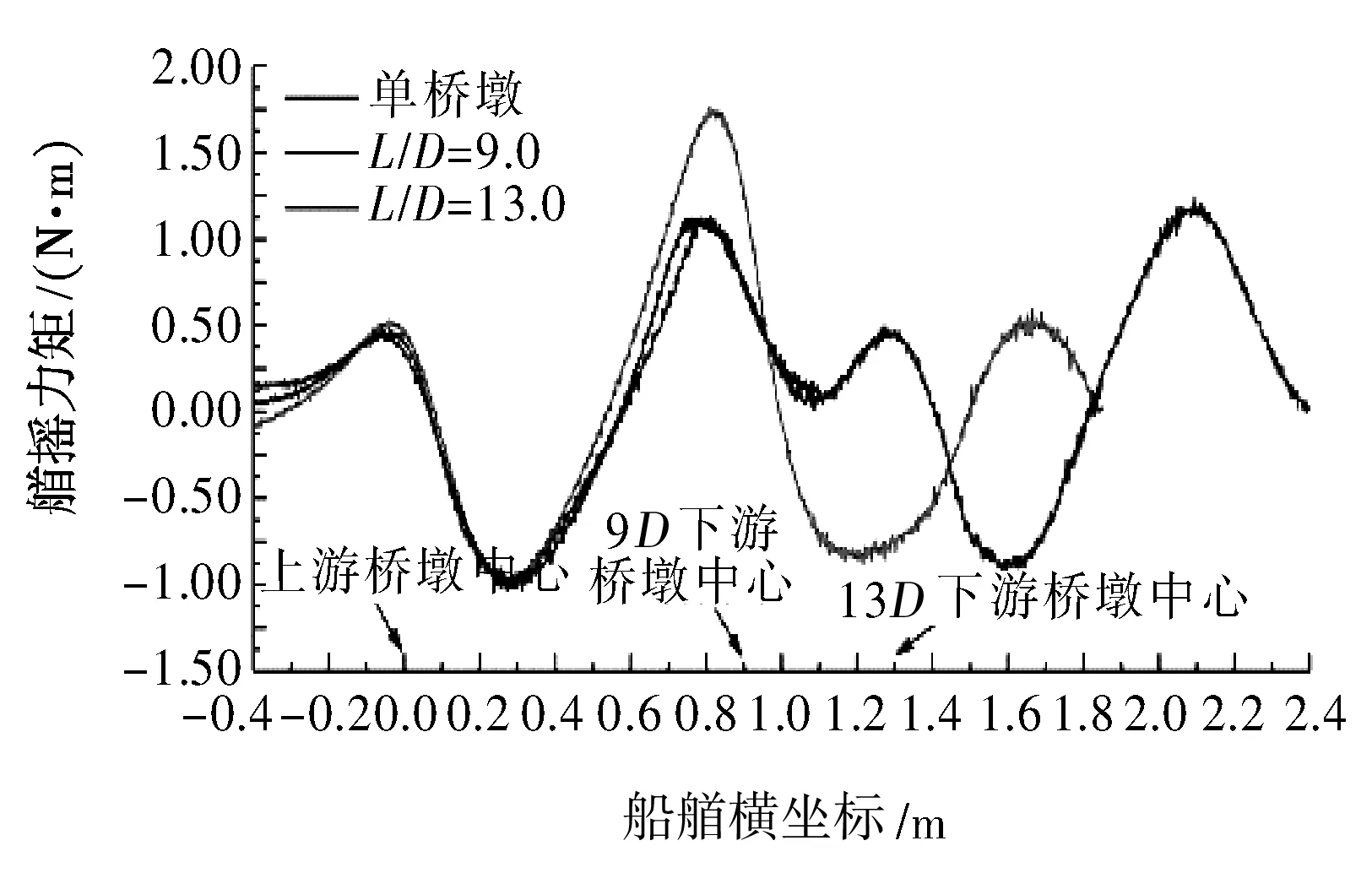
图10 L/D=9.0,13.0和单桥墩下的艏摇力矩曲线Fig. 10 Single-bridge pier swaying moment curve at L/D=9.0,13.0,respectively
1) 物理模型试验和数值计算结果均表明:驶经单桥墩的船舶艏摇力矩曲线呈正峰值、负峰值、正峰值的规律演进。船体边界靠近桥墩,挤压船艏与桥墩之间的水体以及墩前正向横流(推船流)作用是艏摇力矩第一个正峰值形成的原因。船尾即将离开桥墩时,船尾附近水流吸入船尾与桥墩间的过流通道向下游扩散,水体加速流动,负压增强,吸引船尾形成第二个艏摇力矩正峰值。2个正峰值之间的负峰值的出现则与船体相对于桥墩特定位置,涡体沿船身分布强弱相关。
2) 驶经串列桥墩的船舶艏摇力矩演进规律与单桥墩的存在着差异。当两桥墩中心间距较小、为2.0D时,其艏摇力矩演进规律与单桥墩的一致。两桥墩中心间距达3.0D时,其艏摇力矩历时曲线在第一个正峰值与最后正峰值之间出现多个波峰波谷波动现象。第一个正峰值与最后正峰值形成的原因与单桥墩的相同,中间的小幅波动与船舶相对于两桥墩的位置有关。两桥墩间距达9.0D时,下游桥墩对上游桥墩的水动力干扰消失。在两桥墩间距大于13.0D时,船舶驶经上、下游桥墩,船舶艏摇力矩相当于连续经过2个孤立的单桥墩。
