自适应均衡系统在simulink中的仿真研究
2018-09-06张秀秀
张秀秀
(长治学院 电子信息与物理系,山西 长治 046011)
0 引言
信号在不同的传输路径上会产生不同的时延,同一时刻多径传输信号在通信系统接收端就会进行叠加,造成了码间干扰。通信设备在移动,传输环境也随时间变化着,多径效应造成的码间干扰随时间变化着。为了解决这一问题,人们提出了均衡技术。经过研究发现有一种可调滤波器可以补偿码间干扰造成的影响,这就是均衡器。均衡在通信领域中的解释为对通信信道特性的均衡,也就是说在通信系统的接收端加上均衡技术,均衡部分产生与原信道特性相逆的关系式,该相逆的信道特性可以减弱由于信道的多径传输效应造成的码间干扰。
自适应均衡器是最早的均衡装置,它能够根据具体的信道特性去随机地调整自身的系数,以适应多变的信道。自适应均衡器有两种工作状态:一种是训练模式,另一种是跟踪模式。在一开始的训练模式中,通信设备发送端首先发送一个定长的已知训练序列,接收端的均衡器根据已知序列调整均衡系统系数做出正确的判断,随后再传送有用数据。均衡器在接收端具体是通过常用的递归算法来估计通信信道的特性,通过协调系数对信道进行补偿。在发送序列时,要保证均衡装置在最恶劣的信道中,也能得到最佳的滤波系数。只有这样,在真正要接收数据时,变化多端的信道才能被自适应均衡算法跟踪。
1 LMS算法原理介绍
假设H(z)为多径传输环境的传输函数,h(n)为冲激响应,接收设备的工作就是去构造一个H-1(z),即H(z)的逆系统,来还原出发送端发出的原始信号。发射端发出的信号为D(n),D(n)经过多径传输环境到达接收设备的输入端的信号为Y(n),用发射端的信号D(n)与h(n)的卷积来表示Y(n):
Y(n)=D(n)*h(n).
(1)
E(n)=D′(n)-D(n).
(2)
(3)
(4)
2 仿真实验的思路与内容
仿真实验是在matlab中simulink环境下进行的,图1就是建立的仿真系统。首先由伯努利二进制随机数发生器(Bernoulli Random Binary Generator)产生出一个单极性二进制随机码信号,模块参数设定过程:Probability of a zero(0出现的概率)为0.5、Time range(时间范围)为12345、Sample time(采样时间)为1e-5。随机码信号经过继电器(Relay)后生成双极性二进制码,再经过多径模块(Multichannel)去和noise一起进入Enable LMS adaptive filter模块。Enable LMS adaptive filter模块的系数由迭代法产生。LMS模块的主要参数设置为:FIR filte length(FIR滤波器级数)为18、Step-size(μ)步长为0.1、Initial value of filter teps(初始相位)为0。
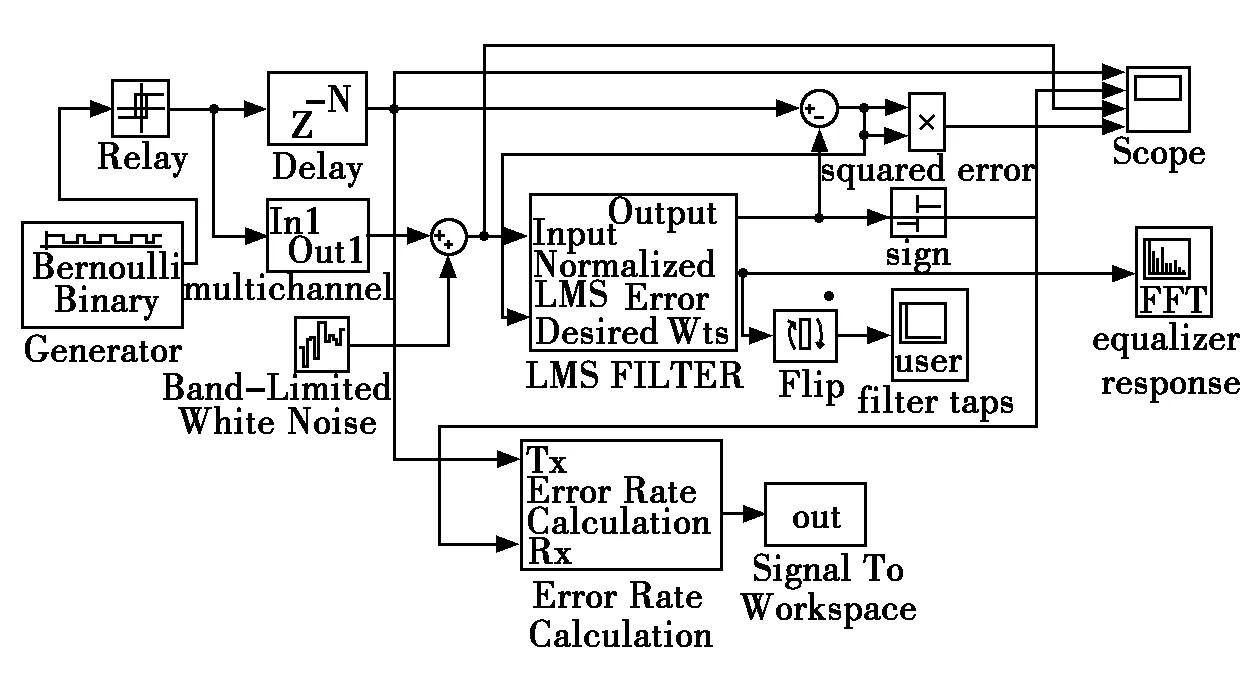
图1 基于LMS算法的自适应均衡的仿真系统
从式子(4)可以知道,系数的计算需要输入信号Y(n)和误差信号E(n)。Enable LMS adaptive filter模块有两个输入端,它们分别是输入信号(In)和误差信号(Err)。步长μ(Step-size)和滤波器级数(Enable LMS adaptive filter length)可在simulink模块参数设置中设定。Enable LMS adaptive filter模块的输出,一路进入符号函数(signl),符号函数的作用是对filter模块的输出整形,整形得到的二进制数将送入误码表(Error Rate Calculation);另一路filter模块的输出去和二进制码进入相减器完成相减运算,目的是得到误差信号E(n)。相减器的输出E(n)分两路,一路返回进Enable LMS adaptive filter模块的E(n)的输入端;另一路求平方后输入到示波器。
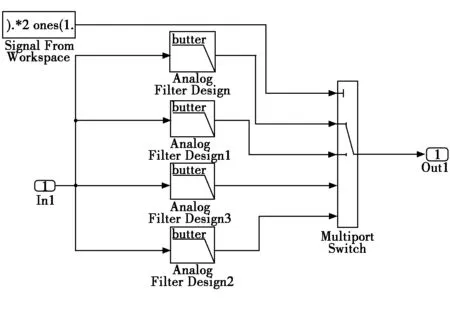
图2 可编程的多径传输环境
图2是图1中多径模块(Multichannel)的内部结构图,在图2中信号来自工作空间模块(Signal From Workspace)的具体参数设定过程:Signal(信号)参数值为[ones(1,1000)ones(1,1000).*2 ones(1,1000).*3ones(1,1000)ones(1,1000).*4]′,Sample time(采样时间)参数值为le-5。
在构造传输信道模型时,通过在当地对好多通信系统调查分析,得出结论:数字信号在近距离传播时的最大实延为12 μs,较远距离为7 μs。也就是说,最大时延扩展是3.2个码元(城区)[3]。通过考虑多径传输的具体环境,发现直射波信号先到达,信号幅度也大。最后到达的其他信号是由于路径越长幅度就会越小。在系统仿真中,考虑了这些具体情况。将多径传输环境接入,模拟通信环境的多变。时间的变化会引起输出误码率的变动,在所构建环境中可以看到在一定的参数设定下,LMS算法的收敛特性和跟踪性能,这对自适应均衡系统的差错控制综合能力判断有着很好的指导作用。
3 仿真结果分析
为了观察自适应滤波算法的跟踪性能,当传输环境发生变化时,其信道特性向量设为:ISI=(-0.2,0.9,0.04)。
图3为不同的N值(横向滤波器的级数)对算法收敛性和均方误差稳态性的影响。在图3中,横坐标为迭代次数n,纵坐标为均方误差(MES)。从图3可以看出,当横向滤波器的级数为10和11时,收敛速度差不多,但是,当横向滤波器的级数为9时,均方误差的稳态值会变小。
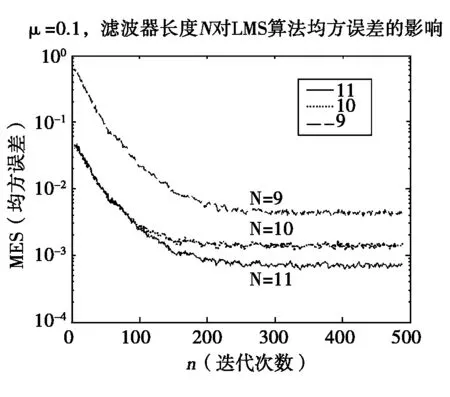
图3 μ=0.1时滤波器长度N取不同值
图4中,符号μ表示迭代算法步长,当迭代算法步长选择不同值时,该图反映了自适应算法LMS的不同收敛特性和不同跟踪性能。从图4可以看出,当步长μ取0.2时,LMS算法收敛速度会变快,均方误差的稳态值也会较大,当步长μ取值较小时,即小于0.1时,LMS算法收敛速度会变慢,但是均方误差的稳态值也会变小。这说明固定步长时,收敛速度与均方误差的稳态值存在矛盾。
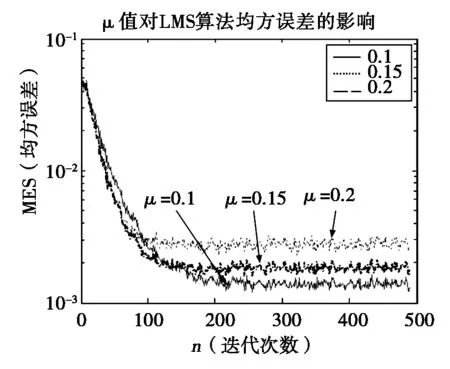
图4 步长μ分别取0.1、0.15、0.2
总之,自适应滤波器的长度是影响算法收敛性的因素之一,滤波器长度越大,运算就会越复杂。在自适应系统的参数选择时,最好构建与实际通信系统情况相近的传输环境,只有这样在理论仿真时实验才更有意义。在通常的多径通信环境中,LMS算法还是能体现出理想的收敛特性和跟踪特性。
