基于Matlab工具箱Rltool的控制系统校正设计
2018-09-06乔永凤
乔永凤,王 凯
(山西工程技术学院,山西 阳泉 045000)
0 引言
控制系统在设计过程中,为改善系统的动态性能和稳态性能,往往要加入校正环节。校正就是给系统附加一些具有某种典型环节特性的部件,通过对校正环节参数的正确选择,有效地改善整个系统的控制性能,达到所要求的指标[1,2],其实质均表现为修改描述系统运动规律的数学模型。因此对控制系统校正环节的优化设计很重要。校正装置的设计过程是一个多次试探的过程并带有许多经验,而Matlab工具箱RLtool为控制系统校正设计提供了强有力的辅助手段。
1 控制系统性能指标[1-7]
控制系统的性能指标是根据客户要求或系统设计者指定的,按其类型可以分为时域性能指标和频域性能指标。不同的性能指标其校正方法也不同,对时域性能指标而言,通常采用根轨迹校正法。

2 用根轨迹进行校正设计[8-13]
常用的控制系统的校正方式是串联校正和并联校正。在控制系统中,系统的稳定性和动态性能取决于系统闭环极点的位置,在根轨迹图中,可以直观的了解当系统某一参数从零变化到无穷大时,闭环极点的走向及位置,也就是说开环零极点的分布决定了闭环系统根轨迹的形状和走向,所以可以通过添加或改变开环零极点的分布使根轨迹形状发生改变,从而达到改善系统性能的目的。
3 RLtool校正设计
设计步骤:
1) 首先根据系统的开环传递函数在Matlab命令窗口中敲入以下代码:
G=tf(1,conv([1,0],conv([1,1],[1,2])))
%系统的开环传递函数
rltool
%调入RLtool组件
2) 在RLtool界面导入G,可以看到校正前系统的根轨迹,如图1所示。

图1 校正前系统的根轨迹
打开Analysis菜单下Response to Step Command,调用LTI Viewer界面,查看单位阶跃响应曲线。如图2所示。
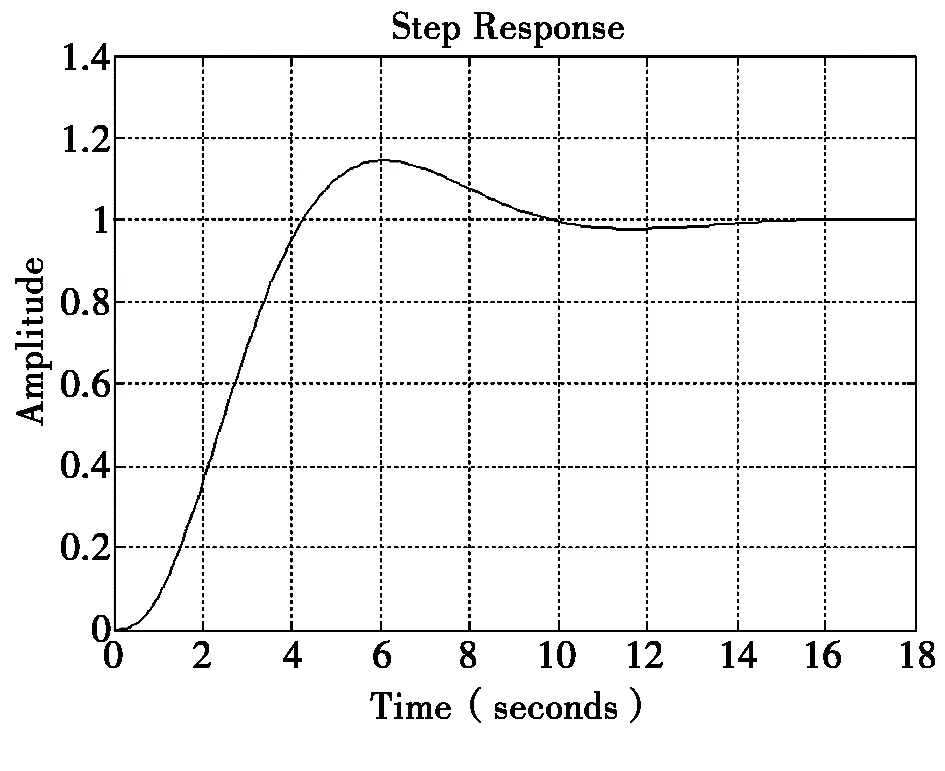
图2 校正前系统的单位阶跃响应

3)在根轨迹图形窗口右击,选取Design Requirements下拉菜单中new,通过Design requirement type设置条件范围,图中由两条射线(等ζ线)和椭圆(等wn线)包围的阴影区域即是在系统性能指标范围内闭环主导极点的选取范围,由图3可见,系统根轨迹和等ζ线及等线相交与一点,此点即为系统的闭环极点。
调用RLtool,打开view,查看 Close-Loop Poles,在ζ=0.5时系统闭环主导极点如图4所示。
和上面数学计算出的闭环主导极点一致,可知系统动态性能满足指标要求。
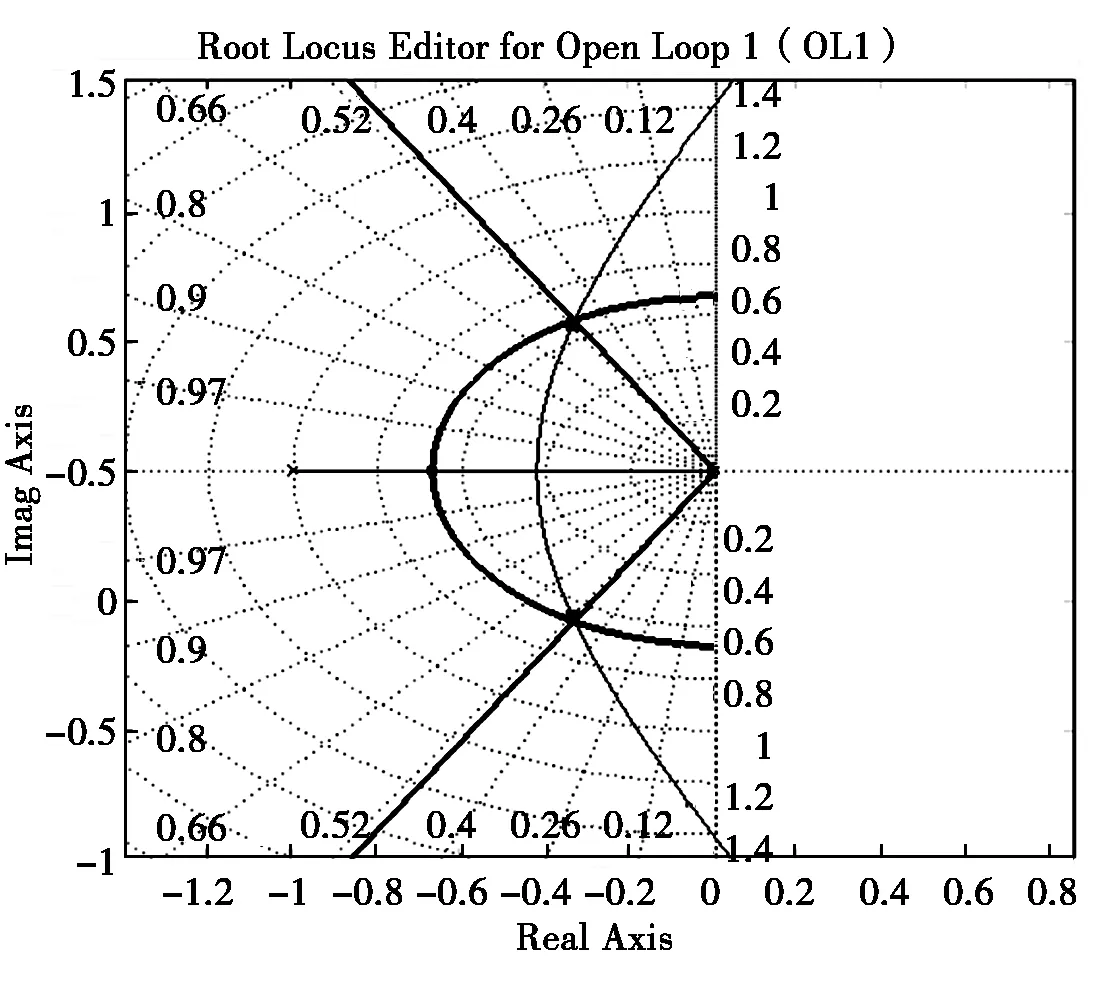
图3 设置条件后的根轨迹
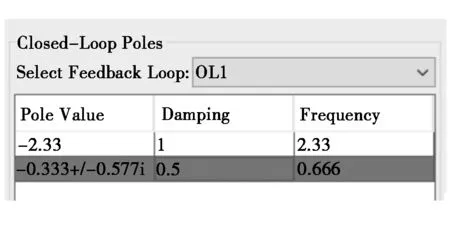
图4 校正前系统的闭环极点
4) 求系统在期望极点上的增益,由幅值条件知:
将要求的静态误差系统与未校正系统的静态误差系数进行比较;得出滞后校正装置的β值。
校正后系统的开环传递函数为:
校正后系统的根轨迹如图5所示。
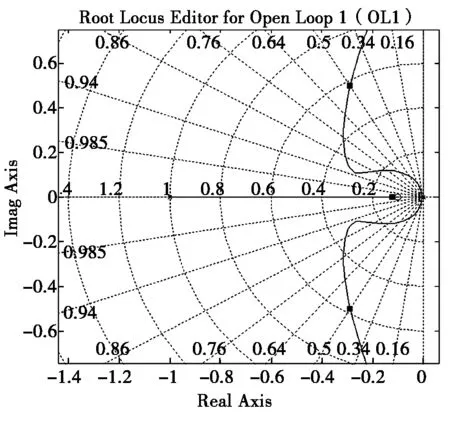
图5 校正后系统的根轨迹
校正后的主导极点在ζ不变的情况下,由view查看 Close-Loop Poles,得:
s1,2=0.29±j0.502.
另一个极点为0.124,和闭环零点靠得很近,形成一对偶极子。

图6 校正后系统的闭环极点
此时,无阻尼自然震荡频率为:
wn=0.58 rad/s.
小于原来的无阻尼自然震荡频率,阻尼系数不变,调节时间变大。
校正后系统的静态速度误差系数为kv=4.9,略小于5。
如果上述误差在工程设计允许范围内,设计就是合理的,否则要重新选择主导极点的位置[4]。
校正后系统的单位阶跃响应曲线如图7所示。
5 结论
在用Rltool对控制系统校正过程中,首先设定使系统性能满意的主导极点的取值范围,然后在此范围内添加合适的零、极点,并在LTI中查看闭环输出响应曲线。如果满意,则根据主导极点和性能指标得出校正环节的设计结果。因而控制系统的校正设计在Matlab工具箱RLtool中变得简便而有效。
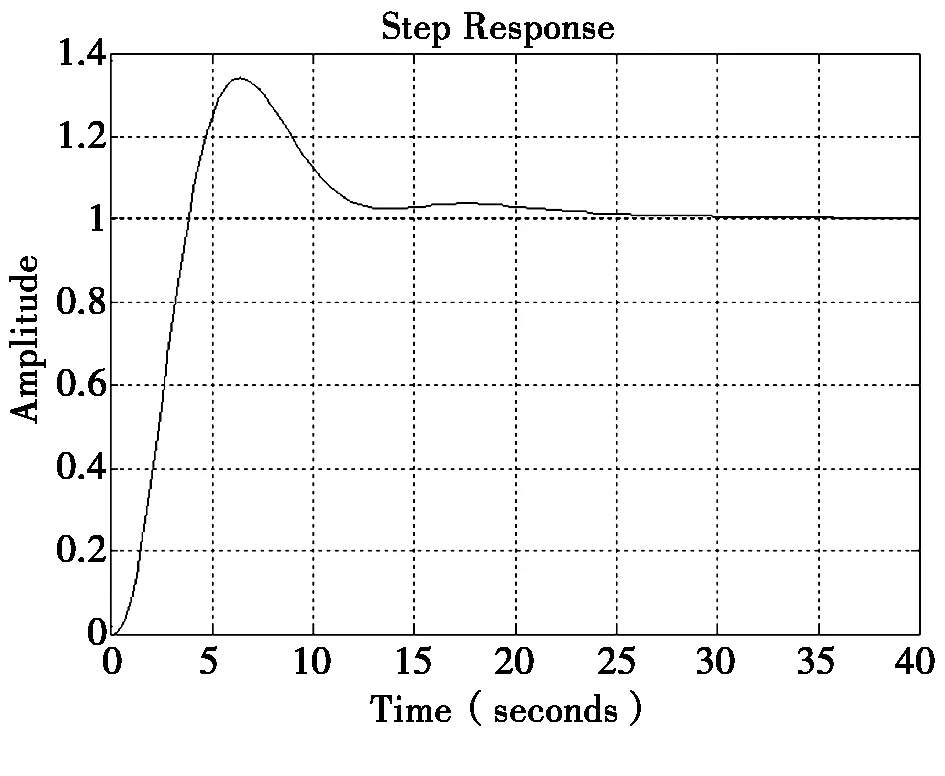
图7 校正后系统的单位阶跃响应
