基于区域CORS的多系统组合PPP定位研究
2018-08-30李江卫孙伟范清彪白洁
李江卫,孙伟,范清彪,白洁
(武汉市测绘研究院,湖北 武汉 430022)
1 引 言
通常CORS系统提供的定位服务局限于系统基准站点间基线所形成的封闭区域之内,对于用户跨网元连续作业以及超出覆盖区域的定位精度则难以保障。而基于区域CORS系统多星座观测条件下,采用增强的实时精密单点定位技术(PPP),由于可用观测信息更多,卫星几何图形更强,能够较大地改善定位精度和收敛速度[1,2,3],并能在一定程度上提高定位精度和可靠性[1,3,4]。
传统非差PPP模型通常使用无电离层组合的伪距和相位观测值进行参数估计[4,5],其中伪距观测值的主要作用在于分离接收机钟差与载波相位模糊度参数[6,8,10]。在多系统PPP数据处理中,为平衡不同系统、不同类型的观测值对参数估计的贡献,需要对观测值进行合理定权[7]。如何克服不准确的伪距随机模型带来的不利影响是多系统组合PPP数据处理的关键[9]。本文采用区域CORS系统所生成的增强信息,基于星间单差模型进行PPP试验研究。该模型消除了接收机钟差参数,无须使用伪距观测值分离接收机钟差与模糊度参数,也就无须考虑对伪距观测值建立准确随机模型,从而提高了基于区域CORS的PPP可用性。
2 精密单点定位参数估计
精密单点定位参数估计方法主要有最小二乘法和卡尔曼滤波估计[9]。卡尔曼滤波估计采用递推算法,根据参数的验前估值和新的观测数据进行状态参数的更新,一般只需存储验前一个历元的状态参数估值,即可递推得到当前历元的状态参数估值,具有较高的计算效率,也易于程序实现。卡尔曼滤波估计的状态方程和观测方程可表示为[9]:
(1)
式中,Xk是t(k)时刻的状态向量;Φk,k-1为从t(k-1)时刻至t(k)时刻系统状态的一步转移矩阵;Γk-1为系统噪声驱动阵;Wk-1为系统激励噪声;Lk为t(k)时刻观测向量,Hk为观测方程的系数阵,Vk为观测噪声。
精密单点定位通常采用双频无电离层组合模型消除电离层延迟,卫星轨道误差、卫星钟差则采用精密星历与精密卫星钟差来消除或削弱其影响。其余误差如天线相位中心偏差、相对论效应、固体潮、海洋潮等误差采用现有模型对其进行精确改正。因此,精密单点定位状态向量X,通常包括接收机位置、速度、接收机钟差、天顶对流层湿延迟以及所有GNSS卫星的模糊度[5]等待估参数:

(2)

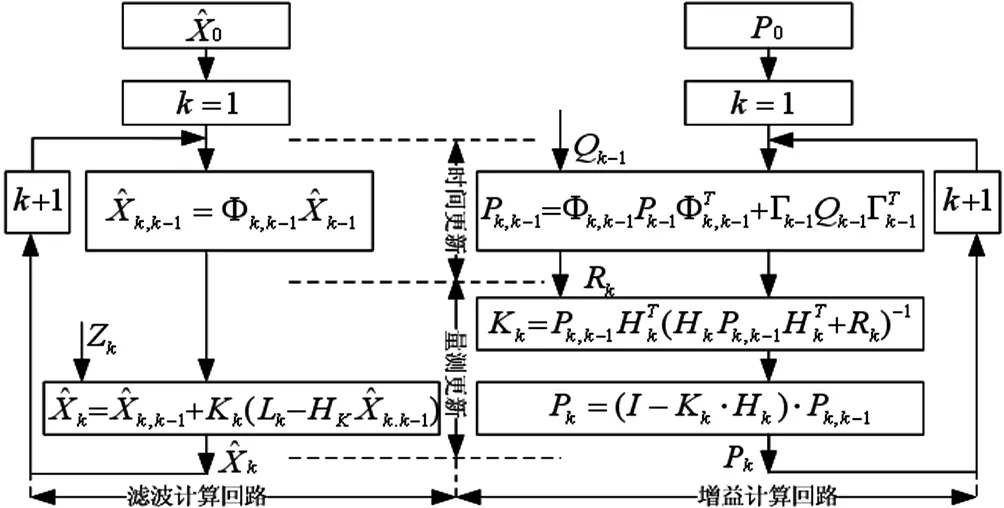
图1 卡尔曼滤波的两个计算回路和两个更新过程
3 多系统观测数据融合的星间单差PPP模型
在非差PPP模型中伪距观测值的主要贡献是用于分离接收机钟差与模糊度参数。本文对非差无电离层组合载波相位观测值进行星间作差,消除了GNSS接收机钟差参数。在该模型中,单系统PPP无须估计接收机钟差,而在多系统PPP模型中,对GLONASS观测值只需估计GPS-GLONASS系统时间差,对BDS观测值只需估计GPS-BDS系统时间差。因此,不必利用伪距观测值分离接收机钟差与模糊度参数,也就无须对伪距观测值严格建模,从而削弱了伪距随机模型对最终定位结果的影响。
单系统PPP以高度角最高的健康卫星作为参考星,而在多系统PPP数据处理中,则以高度角较高且状态良好的GPS卫星作为参考星。假设接收机r同时观测到m颗卫星,则所有卫星的无电离层组合载波相位观测值可组成如下线性方程组[4,5]:

(3)
对上式利用非差-单差转换矩阵可以得到单差方程:

(4)
本文通过对无电离层组合星间单差载波相位观测值进行Kalman滤波处理,实现了GPS/GLONASS/BDS单系统/组合PPP定位。滤波状态包括位置参数、系统时间差、天顶对流层湿延迟和非差浮点模糊度参数。单差状态参量通过非差状态参量采用单-非差转换矩阵而得到[3]:
(5)

(6)
(7)

4 GPS、BDS单系统精密单点定位算法
(1)具体参数估计及误差处理策略
实验具体的参数估计和误差策略如表1所示。值得注意的是,目前IGS只提供了粗略的BDS卫星端PCO改正,尚无机构或组织提供BDS卫星端PCV以及接收机端的PCO与PCV信息,因此无法精确地改正天线相位中心偏差及其变化。

估计参数及其估计策略 表1
(2)实验验证
选取WHCORS系统10个测站2016年DOY264~270共7天的BDS/GPS双系统GNSS观测数据,进行静态和动态PPP实验。测站信息如表2所示。实验将每个测站 24 h观测数据切割为8个子时段,按每子时段为 3 h,一共有448个子时段。

测站相关信息 表2
为评价GPS和BDS单系统PPP的定位性能,实验先采用静态PPP技术对武汉市CORS系统进行解算,从观测数据中分离区域增强信息,其中包括卫星钟差、对流层延迟误差和卫星UPD[2],具体过程如下:
①基于IGU轨道产品和区域CORS数据对卫星钟差进行实时估计。采用星间差分伪距观测值,实时估计低采样率的卫星钟差;通过星间-历元间双差观测值,实时估计卫星钟差的历元间变化,并累加至低采样率卫星钟差,实现高采样率卫星钟差的实时估计。
②区域CORS实时反演基准站天顶对流层湿延迟。
③基于区域CORS观测值,采用“宽巷-无电离层-窄巷”的三步法[11,12]分离稳定的卫星UPD。
④采用以上基于区域CORS的增强信息,实现各基准站各子时段宽巷、窄巷的模糊度实时固定,进而得到无电离层模糊度并实现PPP固定解。
⑤将各子时段PPP解算结果与参考真值做差,获得E、N、U三个方向上的坐标偏差以分析BDS和GPS单系统PPP的收敛时间和定位精度。

图2 BDS(左)、GPS(右)静态PPP收敛时间分布
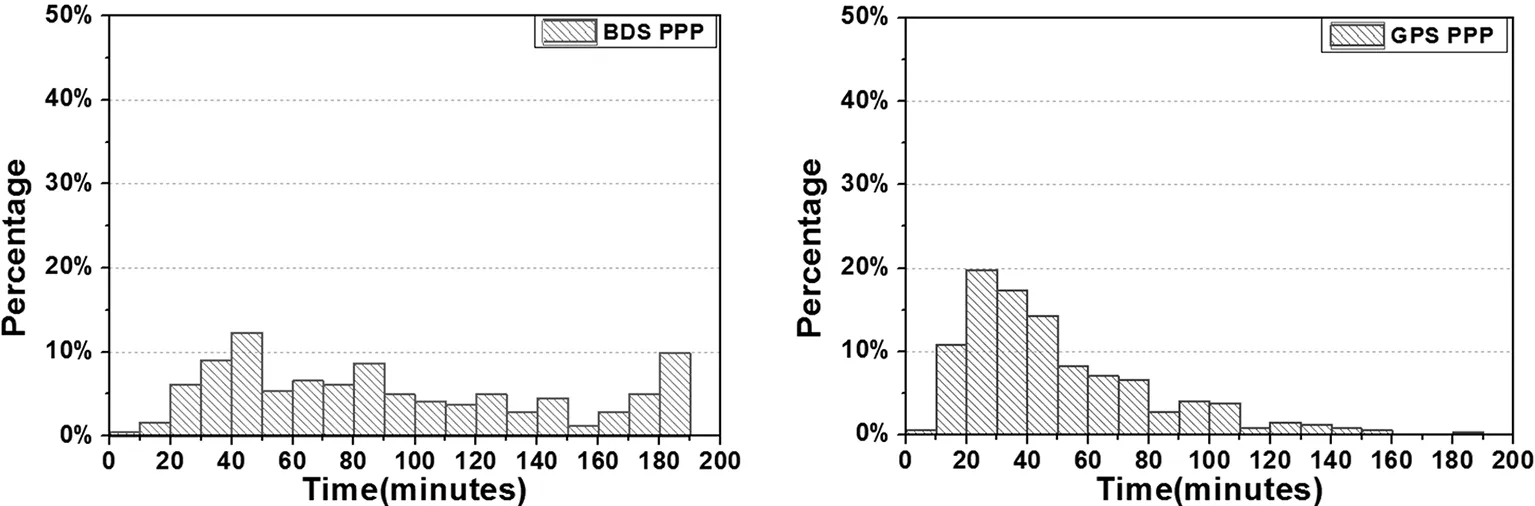
图3 BDS(左)、GPS(右)动态PPP收敛时间分布
图2、图3分别给出了7天所有数据静态、动态PPP的收敛时间分布统计。所有数据的收敛时间统计如下:BDS静态PPP的平均收敛时间为 77.4 min,动态PPP为 98.3 min;GPS静态、动态PPP的平均收敛时间分别为 27.6 min和 49.6 min。不管是静态PPP还是动态PPP,BDS的收敛时间均比GPS长约 50 min左右。
众所周知,PPP的解受卫星轨道和钟差产品精度、星座几何强度的影响较为明显。目前BDS的精密卫星产品精度较GPS差,且无法精确改正PCO和PCV误差。而且,测试时BDS的可用卫星数只有14颗,而GPS有31颗,其几何强度远比BDS要好。因此,BDS PPP的收敛时间明显长于GPS PPP。

BDS PPP和GPS PPP三小时解的东北高分量上的平均RMS 表3
对所有分时段数据计算平均定位RMS偏差,如表3所示。可以看出,对于 3 h的观测数据,BDS静态PPP定位精度优于 5 cm;动态PPP水平方向定位精度优于 8 cm,高程方向约 12 cm。GPS静态PPP定位精度优于 2 cm,动态PPP水平方向优于 3 cm,高程方向约 4 cm。BDS PPP收敛后的定位结果要差于GPS,静态相差约 2 cm左右,动态相差约 4 cm~8 cm。这主要是由于当前BDS的MEO卫星数较少,卫星分布及几何图形比GPS差一些,且轨道和钟差产品精度相对较低等因素造成的。
以上3 h时段GPS和BDS单系统PPP实验的结果表明,GPS PPP动态定位精度在水平方向优于 3 cm,高程方向约为 4 cm,符合要求,BDS PPP动态定位精度水平方向约为 6 cm~8 cm,高程方向超过 1 dm。这主要是由于当前BDS的MEO卫星数较少,卫星分布及几何图形比GPS差,且轨道和钟差产品精度相对较低等因素造成的。
5 GPS/BDS,GPS/GLONASS双系统PPP算法
单系统PPP为获得较高的定位精度通常需要较长的收敛时间,其定位精度及可靠性受外界观测环境的影响较大。而基于星间单差的PPP模型,能融合处理多系统GNSS观测数据,实验验证如下。
同样利用10个基准站2016年9月21日~27日(年积日264-270)观测数据进行3h PPP解算,将解算结果分别与参考真值进行比较,以评估双系统PPP的精度和可靠性。

图4 各站7天双系统静态PPP平均收敛时间

图5 各站7天双系统动态PPP平均收敛时间
各测站双系统静态PPP解7天的平均收敛时间如图4所示。对大多数测站,GPS+GLO PPP静态解平均收敛时间约为 15 min~20 min;GPS+BDS PPP平均收敛时间约为 20 min~25 min。大多数情况下,GPS+GLO静态PPP收敛时间要短于GPS+BDS静态PPP。各测站双系统动态PPP解7天的平均收敛时间如图5所示。对大多数测站,GPS+GLO PPP静态解平均收敛时间在 25 min左右;GPS+BDS平均收敛时间约为 30 min~40 min。所有测站GPS+GLO动态PPP收敛时间要短于GPS+BDS动态PPP。

GPS/BDS PPP和GPS/GLONASS PPP三小时解的东北高分量上的平均RMS 表4
对各测站7天的双系统PPP定位偏差取平均值,其结果如表4所示。GPS/BDS组合PPP和GPS/GLONASS组合PPP静态解都可以取得水平和高程方向优于 2 cm的定位精度。基于双系统组合的动态PPP解均能取得水平方向 1 cm~2 cm,高程方向 3 cm~4 cm的定位精度,且GPS+GLO组合PPP定位精度要略优于GPS+BDS组合PPP。
以上双系统PPP的定位结果表明,无论是GPS/BDS组合PPP,还是GPS/GLONASS组合PPP都能取得水平方向优于 3 cm,高程方向优于 5 cm的定位精度,且GPS/GLONASS组合PPP的定位精度更优。
6 结 语
为了合理融合多系统GNSS观测数据,本文基于区域CORS系统的增强信息,采用能灵活处理单/多系统GNSS观测数据的星间单差PPP模型,克服了多系统伪距观测值难以合理定权的问题。利用该模型实现了BDS单系统和GNSS多系统PPP算法。对单/多系统PPP的定位性能进行了细致地分析。数据处理结果表明:
(1)利用3 h时长的GNSS观测数据,BDS单系统动态PPP绝对定位精度(RMS)水平方向约为 6 cm~8 cm,高程方向超过1dm;
(2)GPS单系统动态PPP定位精度水平方向约为 3 cm,高程方向约为 4 cm;GPS/BDS组合动态PPP定位精度水平方向 2 cm左右,高程方向 3 cm~4 cm,可以满足常规动态应用的需要。
相比传统PPP,通过使用区域CORS系统的增强信息,采用多系统观测数据融合的星间单差PPP模型,实现了PPP快速解算,使定位结果收敛到优于 8 cm的时间缩短了约35%,为PPP的工程应用和拓展区域CORS服务范围提供了一种可行的解决方案。
