北斗定位特种车辆实时油耗检测算法研究
2018-08-29马国良张鹏炜黄振华王文军舒伟勇
马国良,张鹏炜,黄振华,王文军,舒伟勇
(解放军32139部队,北京 101200)
目前,大多数机动车上油量表采用三刻度式仪表或八段数码管显示剩余油量所占油箱体积的比例[1-2]。该类仪表只能使驾驶者定性地了解燃油使用状况和剩余燃油数量,缺乏精确性;使用时还可能出现油量测量系统零部件卡死的现象,给驾驶员带来行车不便,成为安全驾驶的常见隐患之一[3-4]。同时,浮子式油量测量装置在经过陡峭路面时,由于车身振动,油量指针也随之振动,会造成油量显示不准确[5]。特别是对于军用特种车辆而言,由于所附带油箱数量多,且均为不规则形状,所用的油量检测装置还会因车辆停放地面的倾斜度、行使状态的颠簸程度而产生较大误差,从而影响装备的使用效率,甚至会贻误战机。
对此,为确保驾驶员对车辆用油情况的准确感知,方便保障机关对运行车辆进行实时、准确、全面的动态位置远程监控,在不破损现有装备的前提下,采用超声传感、单片机控制、北斗定位与无线通信等技术[6-9],实现对车辆的油量实时检测与定位。由于军用车辆的定位装置采用北斗模块[10],测量到的位置数据不同于民用车辆装配的GPS,故在计算油耗时需要做一定的变换运算。文中从北斗定位仪测得的角度数据入手,建立球面坐标系,以地球半径的长度数据作为中间量,将其转换为两点间距离,然后根据油耗的通常定义计算出燃油消耗量,实现对执行任务车辆的油耗进行实时检测与监控。
1 北斗定位特种车辆实时油量检测系统
特种车辆实时检测与监控系统主要由车载终端油量检测装置和远程监控中心两大部分组成,系统结构如图1所示。

图1 特种车辆实时检测与监控系统构成Fig.1 Structure of real-time detection and monitoring system for special vehicles
该系统的设计思路是在不破坏现有装备结构的情况下,将超声传感器粘贴在油箱底部,从而达到较精确检测该油箱油量的目的。然后,将所检测的油量数据和北斗的定位数据,经单片机计算与控制后,实时显示在驾驶室内。同时利用无线通信技术(如GPRS)[11],将数据传输且保存在互联网服务器中,保障机关人员通过PC、平板和手机客户端实现对车辆运行状态实时、准确、全面的动态监控[12]。
2 油耗概念及数学模型
2.1 油耗定义
油耗是指机动车行驶100 km所消耗的燃油量,计量单位为L。机动车的经济性指标是耗油量,为机动车使用性能中重要的参数之一。在我国,油耗指标由汽车制造厂根据国家规定的试验标准,通过样车测试得出。该指标包括等速油耗和道路循环油耗。
等速油耗,是指机动车在良好的路面上作等速行驶时的燃油经济性指标[13]。由于等速行驶是机动车在公路上运行的一种基本工况,等速油耗容易测定,因此得到广泛采用。如,法国和德国将90 km/h和120 km/h的等速油耗作为燃油经济性的主要评价指标,我国也采用这一指标。国产汽车说明书中标明的百公里油耗,一般都是等速油耗。
道路循环油耗,是指汽车在道路上按照规定的车速和时间规范做反复循环行驶时所测定的燃油经济性指标,又称多工况道路循环油耗[13]。在车速和时间规范中,规定每个循环包含各种行驶的工况,并规定每个循环中的换挡时刻、制动与停车时间,以及行驶速度、加速度及制动减速度的数值。因此,用这种方法测定的燃油经济性,比较接近汽车实际的行驶情况。美国汽车工程师学会(SAE)制定了SAEJ10926道路循环试验规范[14],被广泛采用。
由上述油耗定义及分类可知,通常的油耗概念均为汽车制造商按照规定的试验标准测试而来,目前国内外机动车尚未发现有专门测试油耗装置[15]。
2.2 基于北斗定位测距的数学模型
目前北斗定位设备所提供的位置信息均为弧度值[16-17],因此车辆在任意 2 点(α1,β1)与(α2,β2)之间的距离ΔL在球面坐标系下可表示为

其中,

式中:R为地球平均半径。
当α和β采用角度时,式(1)变为
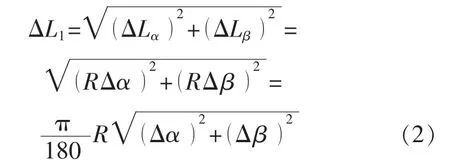
将R=6371004 m,π=3.1415926 代入式(2),得

假设,车辆在 2 点(α1,β1)与(αn,βn)之间的耗油量为 ΔQ=Qn-Q1,行驶的总里程 ΔL=∑ΔLi,则百公里耗油量(10-2L/km)即油耗为

3 油耗检测算法
由油耗的数学模型可归纳出以下计算步骤:
步骤1由连续2次读取的北斗定位仪的位置坐标(α1, β1)和(α2, β2),由此计算 Δα=α2-α1,Δ β=β2-β1。
步骤2将Δα,Δβ代入ΔL计算公式(2),得出地面上2点的(弧线)距离ΔL。
步骤3累加多次ΔL计算结果,得到一定时间段内 (如30 s或2 min等)车辆行驶的里程ΔL=∑ΔLi及消耗的油量ΔQ。
步骤4将ΔQ和ΔL代入式(4),计算得到百公里耗油量,即设定时间段内的油耗。
检测算法软件程序流程如图2所示。
4 试验及结果分析
基于以上系统设计原理及算法,开发了北斗定位油耗实时检测仪(如图3所示),并安装在常用车辆上,进行试验数据采集。
驾驶员驾驶厂家标称油耗为18 L(百公里油耗)的特种车辆,在城市周边不同路况连续行驶2 h,每隔10 min采集1次油耗测量值,采集结果见表1。
为验证样机检测的可靠性,在4种不同路况下,将测得的油耗平均值乘以实际行驶里程,将计算的耗油量与实际消耗的油量相比较,得到误差率,即

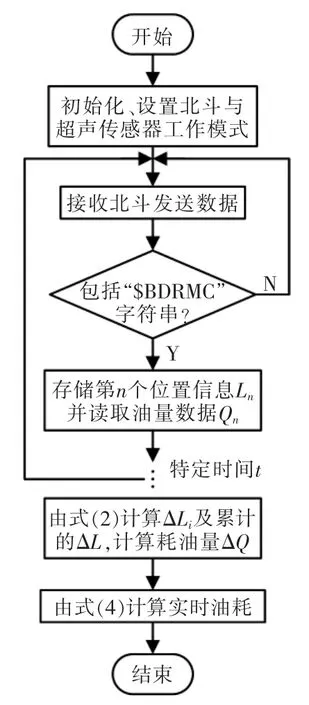
图2 油耗检测算法程序流程Fig.2 Flow chart of fuel consumption detection algorithm

图3 北斗定位油耗实时检测仪样机Fig.3 Real-time fuel measurement prototype with BDS positioning
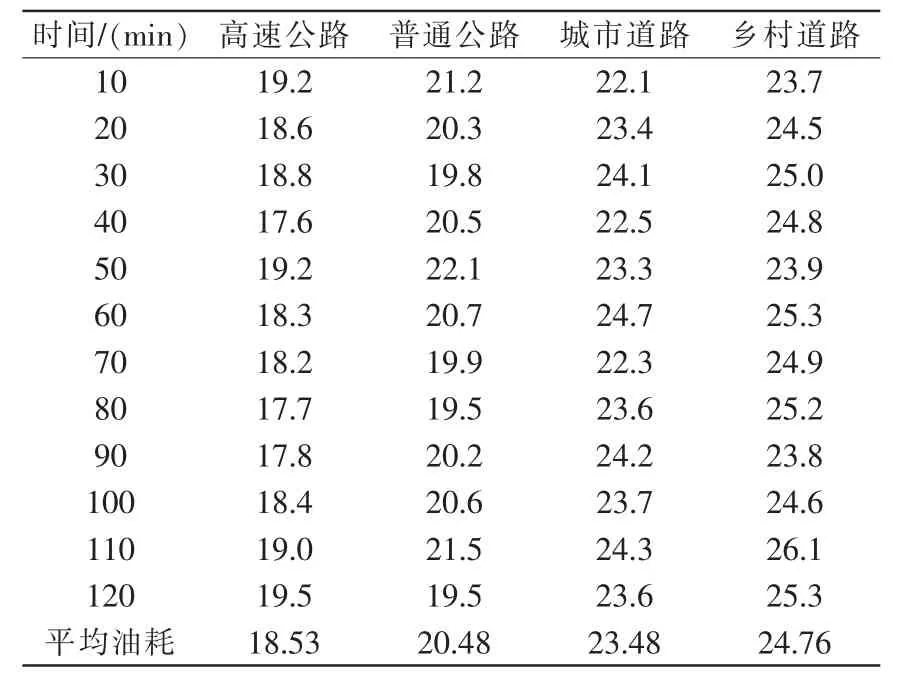
表1 不同路况油耗测量值 (10-2L/km)Tab.1 Fuel consumption measured value in different road conditions (10-2L/km)
误差率见表2。
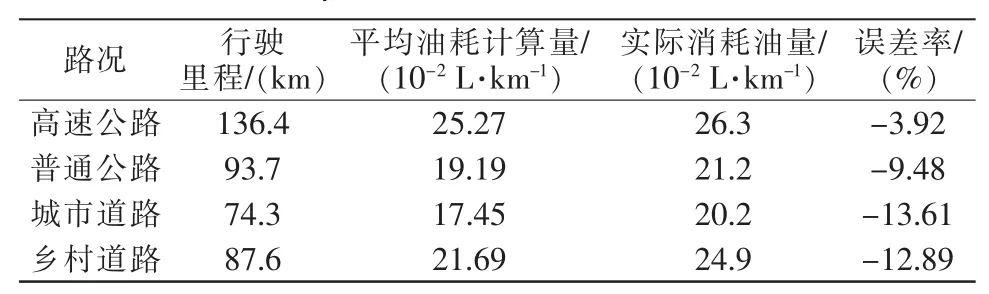
表2 测量耗油量相对于实际值的误差率Tab.2 Error rate of measuring fuel consumption relative to actual value
试验数据的分析结果如下:
1)在路况较好的高速公路上行驶时,测得的油耗数据相对稳定,与厂家标称油耗值相近,且均值略大于厂家标称值。从油耗误差率来看,由测量值计算的油量略小于实际耗油量,但误差率最小。究其原因,厂家标称的油耗通常是在良好路面上测量的等速油耗,在高速上行驶从整个行程来看最接近于等速,因为受收费站及少数路段车辆拥挤等路况的影响会降低车速,频繁地降速、增速就会增大油量消耗。因此,测量值接近且大于厂家标称值,测得油耗计算值小于实际消耗油量符合理论基础。
2)在普通公路和城市道路行驶时,路面质地较好,但路面狭窄,人车密集,会导致车辆行驶缓慢,特别是在城市道路行驶,还受到交通信号灯的约束,更增加了刹车-起步的频率,所以测得的平均油耗大于厂家标称值。另外,由测量平均油耗计算得到的耗油量也小于实际消耗油量,且误差相对较大。
3)在乡村道路行驶时,路面质地较差,会产生较大的摩擦力,因此测得平均油耗数据与厂家标称值相差最大。但是因人、车密度小,避免了因频繁刹车-起步所损耗的油量,所以虽然由平均油耗计算得到的油量也小于实际耗油量,但是误差率相对于城市道路减小了。
5 结语
为提高特种车辆油量检测的实时性和准确性,采用超声传感、北斗定位和无线通信等技术,通过单片机控制研发了油量检测样机,研究了基于北斗定位测距的油耗检测算法。通过在4种不同路况下的试验数据采集,证实了检测样机的合理性和研究算法的正确性,并通过对试验数据分析,说明了路况对油耗数据影响重要性,结果表明:道路摩擦力越小,行驶速度越大,加减速频率越少,车辆越省油。
