基于车头时距的现代有轨电车信号控制策略*
2018-08-20邓君崔梁
邓 君 崔 梁
(1. 中交第二公路勘察设计研究院有限公司, 430056, 武汉; 2. 兰州交通大学交通运输学院,730070,兰州//第一作者,高级工程师)
现代有轨电车感应信号控制是通过车辆检测器测定到达道路交叉口时的交通需求,使信号配时适应交通变化的一种反馈式控制方式。与定时控制相比,感应控制能较好地适应交通量波动,适合在车流量波动比较大的交叉口使用。合理的感应控制信号配时和优先策略能有效减少车辆延误、提高交叉口通行能力。因此,研究感应控制信号配时策略及其优化方法具有重要的现实意义。
感应控制信号配时参数主要有3个:最短绿灯时间、最大绿灯时间、单位绿灯延长时间。主要的相对优先控制策略有绿灯延长、红灯早断、相位插入等。文献[1] 在主动公交信号优先控制下的交叉口以车均延误和延误变化量为指标研究了交叉口延误变化情况,证实主动公交信号优先控制方式具有很好的控制效果;文献[2]以公交优先作为信号控制的一个函数,提出了实时最小绿灯持续时间的计算模型,将该模型和上、下游交叉口的绿灯时间相结合,给出了感应信号公交优先控制策略;文献[3]提出了一种单位绿灯延长时间的计算模型,该模型目标函数为总延误最小;文献[4]提出基于排队长度的最大绿灯时间计算方法;文献[5]研究了绿灯延长、红灯早断、相位插入3种单点公交优先策略的应用范围,并应用延误三角形方法对比分析了3种控制方式在不同交通流下的优先控制效益;文献[6]提出了相位运行优化模型,即信号控制机根据该优化模型判断当前运行相位结束后,将要运行哪一相位;文献[7]提出了一种信号配时优化模型,该模型力求使交叉口乘客减少的总延误最大,并根据实时道路交通流变化规律,构建基于车均延误和人均延误的信号配时优化方法;文献[8]在对客流量大、现代有轨电车发车间隔短这一情况下的现代有轨电车车头时距进行均衡优化的基础上,提出了主动公交信号优先控制模型;文献[9]运用二分车头时距这一思想来分析车头时距分布特性,将车辆行驶状态分为跟驰状态和自由流状态,并基于运行特征分析建立了能同时描述这两类状态对应的车头时距分布特性混合分布模型;文献[10]以现代有轨电车车头时距为约束条件, 给出了在主动信号优先控制的交叉口给予快速公交系统(BRT)车辆相对信号优先的措施。
传统的感应信号控制优先策略在判断是否延长绿灯时间的条件时有不足之处,即每检测到一辆现代有轨电车就延长一个单位绿灯时间,这种绝对优先模式往往会造成交叉口的延误增加;传统的感应信号控制优先策略没有将连续到达的现代有轨电车作为一个整体来考虑延长时间(见图1)[8]。
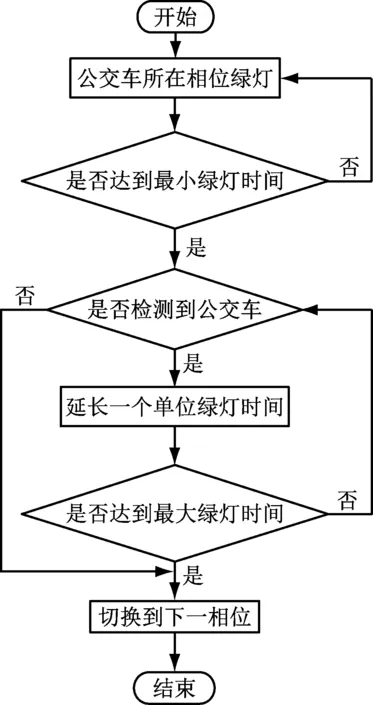
图1 传统感应控制信号优先逻辑流程图
本文首先对绿灯延长条件进行了调整,提出了基于满足给定条件的车头时距相对优先感应控制策略;在此基础上,给出了绿灯延长时间的计算方法;最后,利用VISSIM软件验证了本文方法的正确性和有效性。该策略克服了传统感应信号控制优先策略的不足。
1 相对公交优先控制模型
对于最小绿灯时间、单位绿灯延长时间及最大绿灯时间,本文给定最小绿灯时间和最大绿灯时间,单位绿灯延长时间gextent则根据检测到的现代有轨电车车头时距ht和最大允许车头时距h的关系确定。最大允许车头时距h是判断车流是否连续的一个重要因素。当到达的现代有轨电车之间的车头时距均小于最大允许车头时距,可以认为这些现代有轨电车连续到达且到达比较密集,则这些密集到达的现代有轨电车应该给予优先通行权。当到达的两辆现代有轨电车之间的车头时距大于最大允许车头时距,说明这些现代有轨电车不是密集连续到达。某两辆现代有轨电车之间的车头时距虽然大于最大允许车头时距出现前的现代有轨电车的车头时距,但是是小于最大允许车头时距的,对那些现代有轨电车仍然要给予优先通行权。即当检测到的现代有轨电车车头时距ht≤h时,需要有足够的绿灯时间,使现代有轨电车通过交叉口;gextent根据满足通行条件的现代有轨电车车辆数确定。在此基础上结合绿灯延长、红灯早断、相位插入等方法即可实现本文提出的相对公交优先控制策略。gextent推导过程如下。
当ht≤h时,为了使现代有轨电车能不停车通过交叉口,需要基于现代有轨电车优先通行权给予足够的绿灯时间;当ht>h时,绿灯时间终止,切换到下一相位。所以,当公交专用道上绿灯时间满足第n辆车不停车通过交叉口时,n服从几何分布,即前(n-1)次试验失败,第n次试验成功。前(n-1)次试验失败表示为{ht,j,j=1,2,3,…,n-1}≤h,即前(n-1)个车头时距均小于最大允许车头时距,也就是前(n-1)辆现代有轨电车连续密集到达,需要给予足够的优先通行绿灯时间;第n次试验成功表示为{ht,j,j=n}>h,即第n个车头时距大于最大允许车头时距,也就是第n辆现代有轨电车和前(n-1)辆不是连续密集到达的,从第n辆现代有轨电车开始就不基于优先通行权。所以,当p为现代有轨电车车头时距小于h的概率时,即
Pn=pn(1-p)
(1)
式中:
Pn——绿灯时间延长至第n辆车的概率。
在现代有轨电车车头时距分布函数f(t)已知的情况下,则有

(2)
式中:
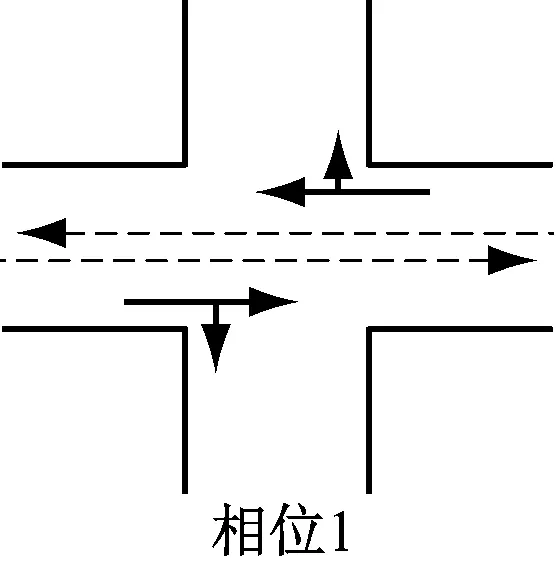
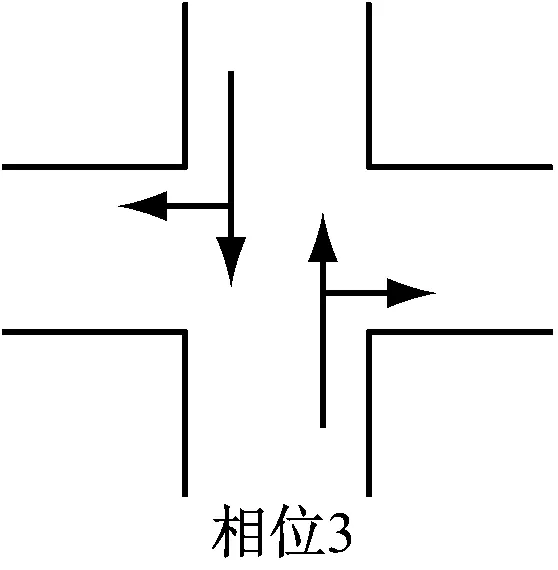
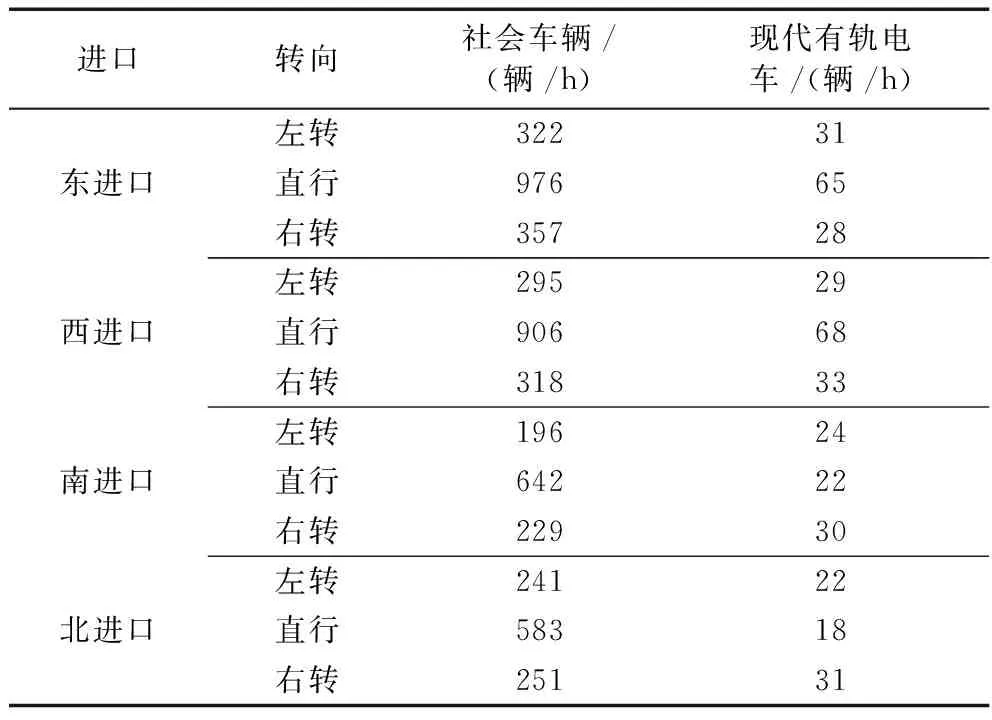
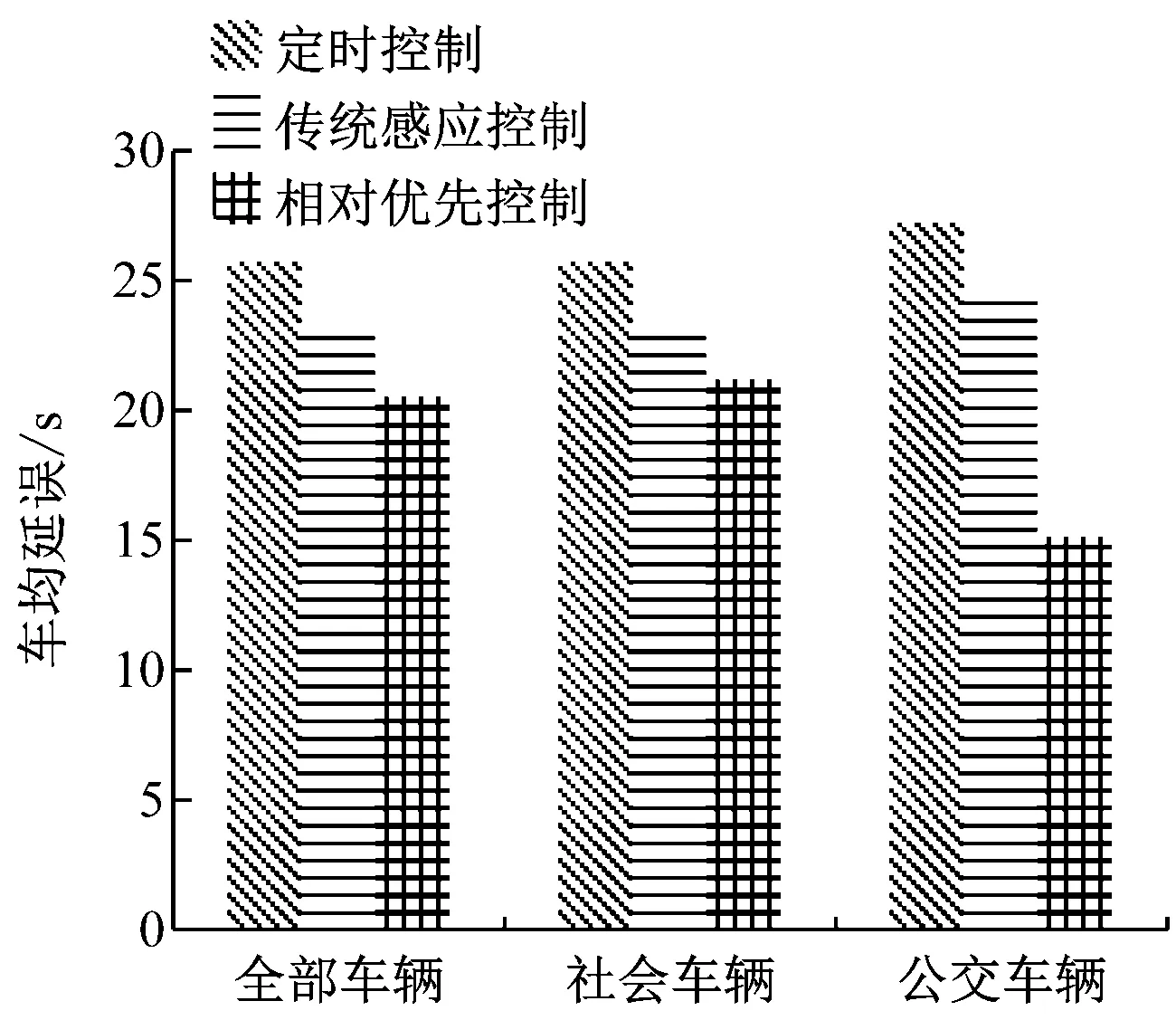
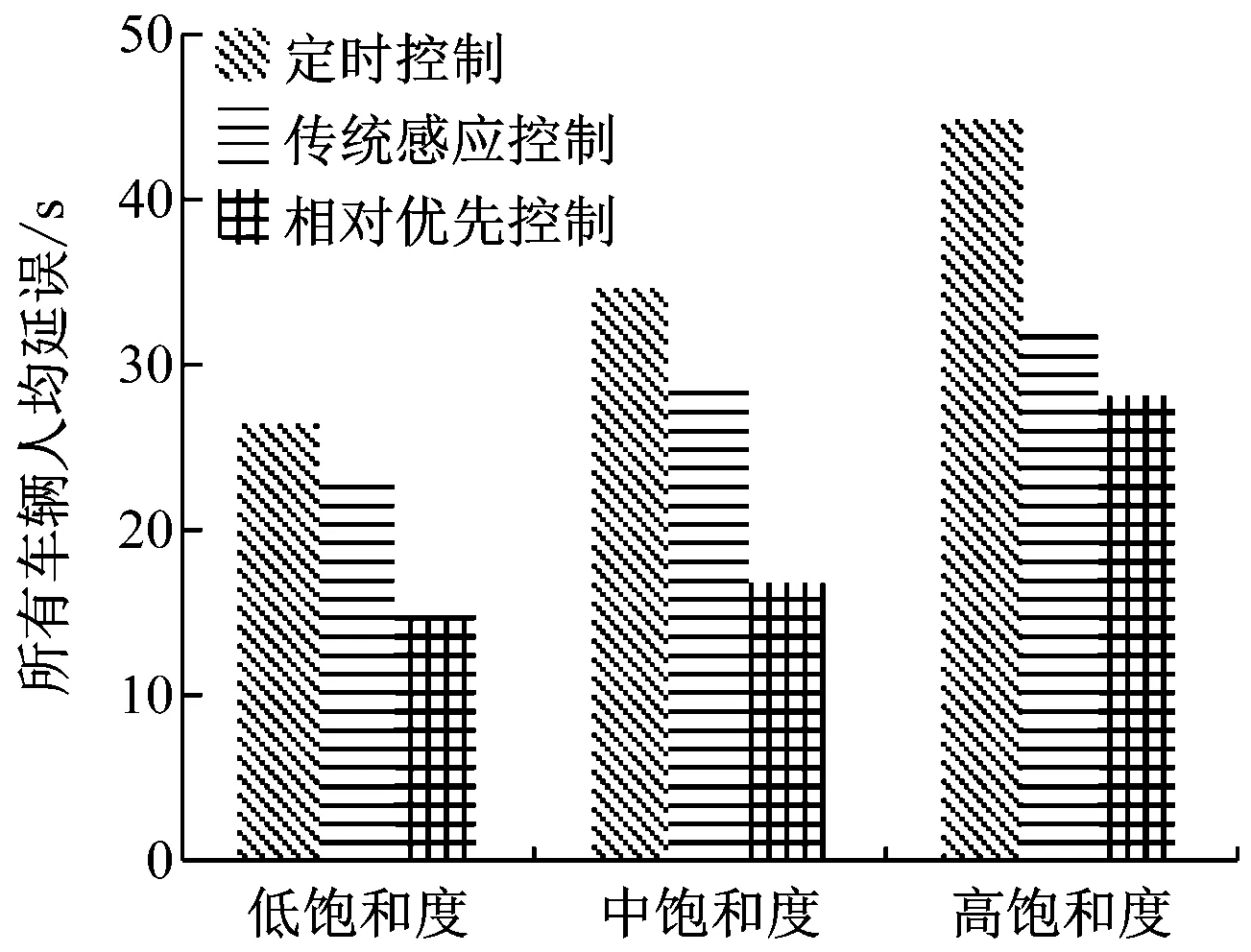
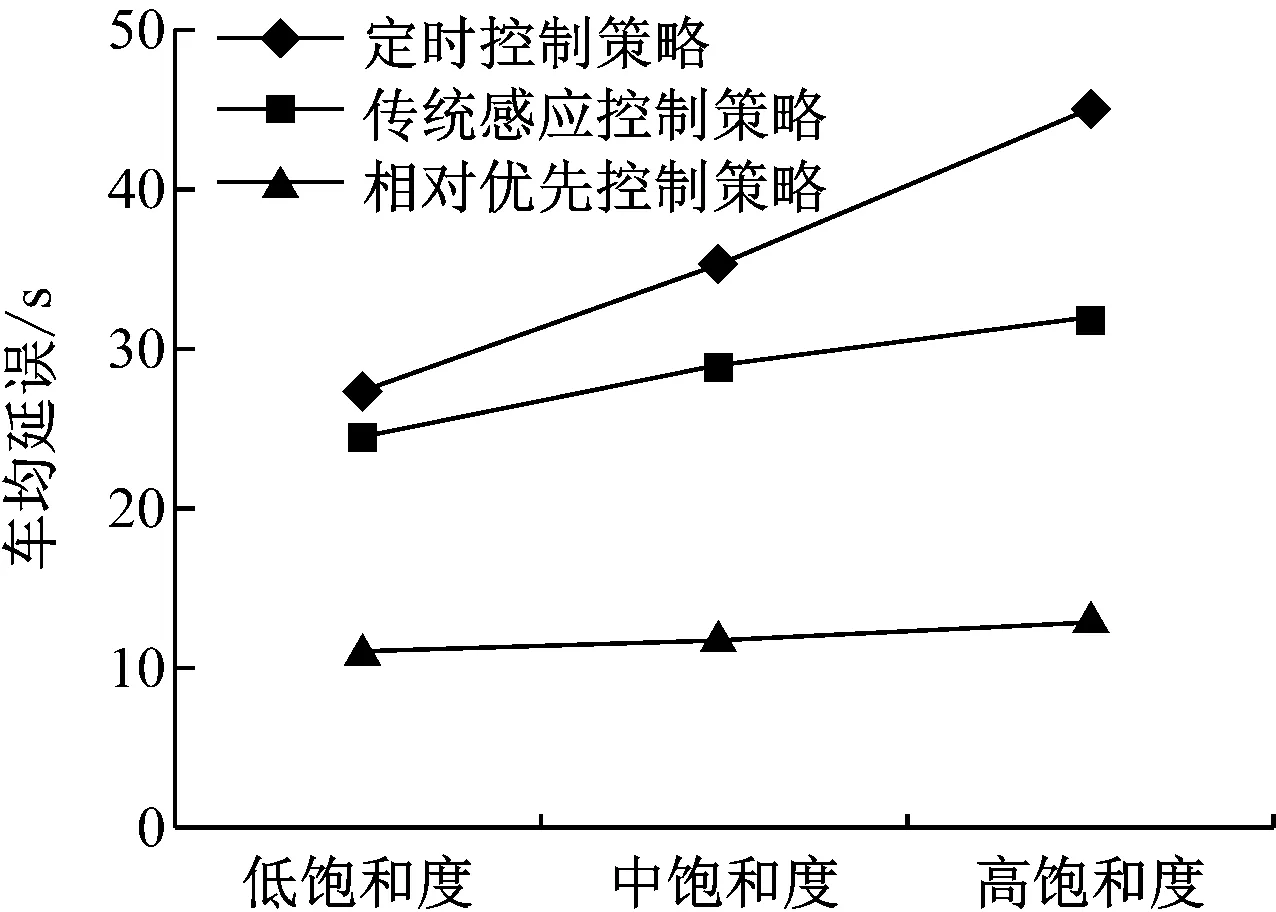
P(t 由几何分布的特征可以计算出绿灯延长过程中的平均车头时距数(车辆数): 式中: E(n)——车头时距数为n的期望值。 进一步可得前n辆车的平均车头时距: 式中: V——现代有轨电车的到达率; 综上所述,可得平均绿灯延长时间为: (1) 当现代有轨电车车头时距服从科恩分布时: (6) 其中λ=αq/(1-Δq),又因为 p=F(h)=αe-λ(h-Δ) 式中: α——非排对车辆的比例; q——车辆流率; Δ——最小车头时距; λ——模型系数。 所以,现代有轨电车车头时距服从科恩分布时有 (2) 当现代有轨电车车头时距服从移位负指数分布时有 (3) 当现代有轨电车车头时距服从负指数分布时有 根据选定的交叉口公交专用道设置模式(见图2)可知,东西两个进口方向均可能有现代有轨电车到达,两边放行满足条件的现代有轨电车,此时,东进口需要延长绿灯时间gextent1和西进口需要延长绿灯时间gextent2多数情况下不同,所以,该相位绿灯延长时间取两者中的较大值,即gextent=max{gextent1,gextent2}。 在公交专用道停车线上游L米处安装车头时距检测器,检测现代有轨电车的车头时距并告知信号机现代有轨电车到达交叉口的时刻,为信号控制逻辑进行十字交叉口的信号调整提供时间参数。根据现代有轨电车到达时刻的不同,采用不同的控制方案。 只考虑在一个方向设置公交专用道,所选取的十字交叉口如图2所示。公交专用道呈东西走向,采用“路中直行”的敷设形式;东西向道路为双向8车道,包括公交专用道在内且公交专用道在道路最内侧;南北向道路为双向6车道,无公交专用道。 图2 公交专用道十字交叉口渠化图 对以上十字交叉口采用四相位控制(见图3),现代有轨电车与同向直行社会车辆共同放行,右转和直行车辆在同一相位。 图3 公交专用道十字交叉口相位图 (1)现代有轨电车在相位1时段到达,已达到最小绿灯时间gmin,此刻若满足ht (2)现代有轨电车在第2或第3相位时段到达,此刻若满足ht (3)现代有轨电车在相位4时段到达,此刻若满足ht 相对优先策略逻辑流程如图4所示。 选取兰州市西津路与武威路交叉口作为仿真验证交叉口(如图2所示)。其中东西方向设有路中直行的公交专用道,南北方向无公交专用道。该交叉口是4相位方案(如图3所示),信号周期为77 s,各相位绿灯时间分别为25 s、15 s、15 s、10 s,黄灯时间均为3 s。检测器设置距离L取100 m,最大允许车头时距h取交通信号控制手册(TSC)的推荐值3 s。假设:现代有轨电车辆的车头时距服从负指数分布;小汽车平均载客量为2人;现代有轨电车平均载客量为40人。仿真测试所需的基础交通量参数见表1。 图4 相对优先策略逻辑流程图表1 仿真交叉口基础交通量参数 进口转向社会车辆/(辆/h)现代有轨电车/(辆/h)东进口西进口南进口北进口左转32231直行97665右转35728左转29529直行90668右转31833左转19624直行64222右转22930左转24122直行58318右转25131 利用VISSIM软件建立仿真模型,通过 VISVAP 模块编程,实现基于现代有轨电车车头时距的单点公交相对优先控制策略。仿真运行时间为0~10 800 s, 数据采集时间为600~10 800 s。对比的控制策略包括:①定时控制策略,利用韦伯斯特公式计算常规四相位控制方案;②传统感应控制策略,即图1控制逻辑;③基于车头时距的相对优先感应控制策略。不同交通负荷(饱和度)下3种控制策略的效益见表2。 表2 不同交通负荷下3种控制策略的交叉口效益指标 s 由图5可知,与定时控制和传统感应控制相比,低饱满和度下基于车头时距的相对优先控制策略可以使社会车辆、现代有轨电车的车均延误减少,且现代有轨电车的车均延误减少幅度远大于社会车辆。类似的结论在中、高饱和度下仍可以得到。由图6可知,基于车头时距的相对优先控制策略可以使交叉口所有车辆的人均延误降低。 图5 低饱和度下不同控制策略的交叉口车均延误对比 图6 不同饱和度下不同控制策略的交叉口人均延误对比 分别对低、中、高饱和度下3种控制策略的效益进行对比,得到不同饱和度下的社会车辆和现代有轨电车的车均延误指标变化,如图7和图8所示。由图7可以看出,在不同的饱和度下,传统感应控制策略和相对优先控制策略下的社会车辆车均延误的变化趋势基本一致(平缓增大)。但是,随着饱和度的增加,定时控制策略和传统感应控制策略下的社会车辆车均延误快速增加,饱和度越高,延误幅度越大,说明基于车头时距的相对优先控制策略可以克服定时控制策略和传统感应控制策略的缺点,从而降低社会车辆的车均延误。由图8可以看出,在不同饱和度下,基于车头时距的相对优先控制策略下的现代有轨电车的车均延误增幅较小,随着饱和度增大,定时控制策略和传统感应控制策略下的延误幅度越来越大于相对优先控制策略,说明基于车头时距的相对优先控制策略可以有效降低现代有轨电车辆车均延误。 图7 社会车辆交叉口车均延误 图8 现代有轨电车交叉口车均延误 仿真测试和分析结果表明,与定时控制策略、传统感应控制策略相比,基于车头时距的相对优先控制策略在实现现代有轨电车优先通行的同时,还能对整个道路交叉口有所优化,既降低了整个交叉口社会车辆和现代有轨电车辆的车均延误,也降低了社会车辆和现代有轨电车辆的人均延误,且现代有轨电车辆的车均延误和人均延误降低幅度大于社会车辆的,说明了公交优先控制策略的有效性。本文仅选取典型道路交叉口建立仿真模型,并在一定的道路交通条件和信号控制条件下进行仿真测试,故实际效果有待实践检验。


2 相对优先控制逻辑

3 仿真测试与分析



4 结语
