基于可见光通信的无人机海洋生态采集系统
2018-08-03谭智诚孙山林辛以利
谭智诚,孙山林,李 云,姚 钘,辛以利
(桂林航天工业学院电子信息与自动化学院,桂林 541004)
1 引言
海洋占据全球约70%的面积,并且在远海地段,电磁波无法在水下传输,也无法建立中继基站[1]。因此,要想进行远距离海洋数据通信,构建由“北斗卫星网络-空中无人机网络-水下传感器网络” 组成的三位一体声光电融合的监测与通信网络,将有助于在远海缺乏无线通信信号覆盖的情况下,保障远海感知数据的高效可靠传输,进而实现海洋资源的有效开发和保护[2]。
2 系统总体框架
基于北斗卫星导航的无人机海洋生态数据采集系统由地面站、北斗导航卫星、无人机、海面浮标和水下传感器五部分组成,如图1所示。
水下传感器采集水下生态系统的实时情况,并通过水声通信的方式将采集到的信息传送到水面的浮标。浮标把声信号恢复成电信号之后存储起来,在每天的特定时段通过可见光通信的方式将数据传输给前来采集的无人机。在该时段,地面站给无人机发出采集数据的指令,无人机借助北斗卫星导航系统到达待采集数据的水面浮标附近,而后通过浮标上的可见光通信设备进行精确定位。在通信链路建立之后,无人机通过可见光通信的方式快速采集浮标上存储的水下生态系统的信息。为了克服可能的太阳背景光噪声,增加通信系统的信噪比,浮标上的LED要使用单色光。
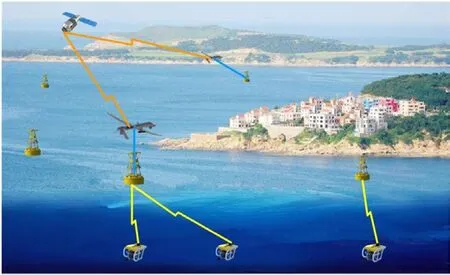
图1 基于北斗导航的无人机海洋生态数据采集系统
通过构建“声-光-电”融合的监测与通信网络,实现远距离高效率的数据准实时传输,因此,北斗卫星导航、无人机数据采集以及可见光通信是本系统的核心部分。为了保证本系统的有效运行,一方面要有更多的、更有效的能源使无人机能够覆盖更大的水域面积进行水下监测数据采集,即实现能量的“开源”;另一方面要用先进的通信技术使无人机可以快速有效地采集海洋生态监测数据,以确保在数据采集阶段消耗更少的无人机上携带的能量,即保证能量的“节流”。
3 系统关键技术
本项目的关键技术如图2所示。
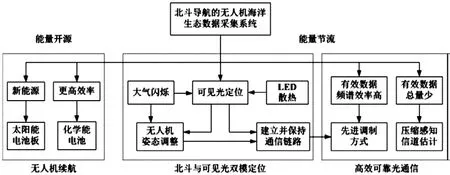
图2 系统关键技术框图
3.1 无人机续航技术
无人机的续航能力决定了本系统的覆盖范围。增加无人机的能源供给,提升其他能源到机械能的转化效率,将极大地扩大无人机的巡航范围,增强系统的实用性。因此要为无人机完成能量的“开源”,找到额外的能源供给(如太阳能电池板)和更有效的能源供给(如化学能电池),同时要确保新的能源供给不会给无人机增加过多的载荷。
3.2 北斗卫星[3]和可见光双模导航定位技术
在为无人机完成能量“开源”的同时,还要为其“节流”。无人机在到达数据待采集的水面浮标附近时,必须要快速有效地完成自身精确定位和数据采集。首先,无人机通过北斗卫星接收浮标的粗定位信息,盘旋至浮标上空。其次,浮标上LED发出的可见光可通过幅度调制携带LED(即浮标)的位置信息。通过这些位置信息,无人机将完成自身位置的修正,使其置于浮标正上方,即实现可见光精确定位,为接下来的数据采集做好准备。同时,浮标所处的水体环境和无人机所处的大气环境都在不停地变化,会破坏可见光传输链路的稳定性。因此,要求处于悬停状态的无人机有快速姿态调整的能力,以迅速地感知光信号强度的变化,并对机身作出相应的调整,使得无人机上的接收器和浮标上的LED处于实时对准的状态,保证数据采集的快速完成。再次,为了增加传输系统的信噪比,有效地将可见光信号传输到悬停的无人机上,需要使用大电流调制单色LED。随之而来的是LED的散热问题。尽管浮标所在的水环境是天然的散热“器件”,但是如何对抗水体给设备带来的侵蚀,同时有效地将LED上的热量传导到水体内部,依然是实现整个系统长期、可靠运行的关键问题。
3.3 高效可靠的可见光通信技术
浮标上存储的水下生态信息需要通过先进的调制方式加载到LED上[4]。越是先进的调制方式,越能提高频谱效率,越能用更短的时间传输相同速率的信息,为无人机完成能量的“节流”。尽管可见光通信可以大容量地传输数据,但是为了节约采集数据的无人机的能源,在采集水下原始数据时,要尽可能地丢弃冗余信息,仅凭传输给无人机的少量数据就可以在地面站通过算法恢复出水下生态环境的全貌。为此,本项目将压缩感知技术应用于水下环境,其关键之处是找到适用于本系统的字典(基)和测量矩阵。水下无线传感器网络在采集到生态环境的信息后,通过水声通信的方式传输到水面浮标。而水声信道受到水体运动和水下生物运动的影响在时时地变化着。因此,为保证水声通信的有效传输,需要对水声信道进行实时估计。传统的信道估计方式要占用大量的频谱资源,导致有效信息的传输效率降低。因此,需要设计适合水声信道的高效信道估计算法,通过降低估计所需的信道频点数目,快速地计算出信道其余频点的实时频率响应特性。浮标和无人机之间的可见光传输亦如是,需要通过大气信道。大气中空气折射率的随机变化,将给传输的光信号带来闪烁,即接收到的光信号在时间上出现随机波动。因此,也需要采用上述的信道估计方法,对于大气信道进行实时估计。根据估计的水声信道和大气信道,有针对性地在不同频点上传输不同制式的信息以提升系统的有效性。
4 信道分析
4.1 海洋大气信道的影响
无人机在和水面浮标进行可见光通信时,要进行实时的姿态调整,以满足视距通信的要求。而在计算无人机与水面浮标二者位置偏差时,海洋大气信道的闪烁特性会使姿态调整算法出现错误。如果没有大气闪烁带来的接收到的光信号强度的随时变化,当无人机接收光信号强度变弱时,意味着无人机与水面浮标的距离变远,需要调整姿态或是作出细微的位置调整。而大气闪烁的存在,通常情况下会使光信号强度变弱,若此时无人机还进行先前的姿态或位置调整,就会破坏正常的视距通信。因此,由大气湍流带来的闪烁效应就给原有姿态调整算法带来了不确定性。这就需要为该算法引入调整因子,先消除闪烁的影响,再进行位置或姿态的补偿,以保证接收到信号的可靠性和通信链路的时刻畅通。
4.2 信道估计的快速压缩感知算法
在本系统中,采集到的海洋生态环境监测数据要从水下传感器通过水声通信传输到水面浮标,再从水面浮标通过可见光通信传输到从地面站前来标。而水声信道受到水体运动和水下生物运动的影响在时时地变化着。因此,为保证水声通信的有效传输,需要对水声信道进行实时估计。传统的信道估计方式要占用大量的频谱资源,导致有效信息的传输效率降低。因此,需要设计适合水声信道的高效信道估计算法,通过降低估计所需的信道频点数目,快速地计算出信道其余频点的实时频率响应特性。浮标和无人机之间的可见光传输亦如是,需要通过大气信道。大气中空气折射率的随机变化,将给传输的光信号带来闪烁,即接收到的光信号在时间上出现随机波动。因此,也需要采用上述的信道估计方法,对于大气信道进行实时估计。根据估计的水声信道和大气信道,有针对性地在不同频点上传输不同制式的信息以提升系统的有效性。
5 信道分析
5.1 海洋大气信道的影响
无人机在和水面浮标进行可见光通信时,要进行实时的姿态调整,以满足视距通信的要求。而在计算无人机与水面浮标二者位置偏差时,海洋大气信道的闪烁特性会使姿态调整算法出现错误。如果没有大气闪烁带来的接收到的光信号强度的随时变化,当无人机接收光信号强度变弱时,意味着无人机与水面浮标的距离变远,需要调整姿态或是作出细微的位置调整。而大气闪烁的存在,通常情况下会使光信号强度变弱,若此时无人机还进行先前的姿态或位置调整,就会破坏正常的视距通信。因此,由大气湍流带来的闪烁效应就给原有姿态调整算法带来了不确定性。这就需要为该算法引入调整因子,先消除闪烁的影响,再进行位置或姿态的补偿,以保证接收到信号的可靠性和通信链路的时刻畅通。
5.2 信道估计的快速压缩感知算法
在本系统中,采集到的海洋生态环境监测数据要从水下传感器通过水声通信传输到水面浮标,再从水面浮标通过可见光通信传输到从地面站前来采集数据的无人机,最后在地面站用算法进行恢复。这中间经历了水声信道和大气信道两个无线信道,需要通过信道估计和自适应调制两种技术的有机结合可以克服信道衰落给通信系统带来的性能恶化[5]。而传统的信道估计算法或是耗时长、或是与实际偏差大,很难在有效性和可靠性上做到有机统一。本课题将着重分析水声信道和大气信道各自的特点,通过压缩感知的方式,找到适合的字典(基)和测量矩阵,并在误码率允许的范围内牺牲一部分估计精度,以换取算法的快速完成,保证信道估计的有效性。
6 结束语
以北斗卫星导航系统为架构,以无人机为载体,以可见光通信技术为手段,结合北斗卫星和可见光的双模导航定位方式,实现无人机对海洋生态数据的高效采集。通过构建由“北斗卫星-无人机-水下传感器”组成的融合声光电的海洋监测、定位与通信网络,在缺乏微波通信设备的情况下,实现了远海感知数据的高效可靠定时传输,促进广西北部湾海域海洋生态资源的开发和有效保护。本项目中,水声网络传输水下生态数据到水面浮标,无人机利用可见光通信方式采集浮标存储的数据,并结合北斗卫星和可见光的双模导航定位方式,实现无人机和浮标的“无缝”对接。■
