基于乒乓舵的引信滚转角控制方法
2018-07-09霍鹏飞施坤林雷泷杰
霍鹏飞,施坤林,雷泷杰
(1.西安机电信息技术研究所,陕西 西安 710065;2.北方智能微机电集团有限公司,北京 101149)
0 引言
二维弹道修正引信是目前无控旋转稳定弹灵巧化的热点[1],其中采用旋转解耦机构用于引信气动执行机构相对于高旋弹体滚转隔离,通过对气动执行机构进行滚转控制实现弹道修正[2],滚转控制主动力矩有电磁力矩和气动力矩,典型代表分别为美国的PGK[3],英国BAE的银弹引信[4]和南非的AcuFuze[5]。
基于电磁力矩的滚转控制方式,由于引信气动执行机构与弹丸之间电磁耦合力矩大,造成对弹丸转速的衰减,不利于旋转稳定弹稳定飞行。基于气动力矩进行滚转控制多采用舵偏角连续可调的线性舵[5],由于线性舵需要对舵偏角进行闭环位置控制,组成较为复杂,不利于在引信有限空间内的小型化集成和降低成本。另一种可能的气动力矩方案是乒乓舵,常被应用于旋转导弹俯仰和偏航姿态控制[6],乒乓舵仅控制舵面正负换向,组成、结构相对简单。为了减小二维修正引信与高旋弹体之间的耦合力矩,降低气动控制机构的复杂度,提出了基于乒乓舵的引信滚转角控制方法。
1 引信滚转角动力学模型及PID控制器
1.1 引信滚转角动力学模型
通过对气动执行机构进行滚转控制实现弹道修正的修正弹外形示意图如图 1所示。鸭舵包含一对同向安装的修正翼面和一对差动安装的导转翼面。通过控制引信滚转角来改变作用在修正翼面上的力的方向,以此改变弹丸飞行姿态,为弹丸提供所需方向上的修正力,使得弹丸不断接近目标。在弹丸飞行过程中引信绕自身纵轴旋转时主要受到气动力矩和来自弹丸与引信之间的耦合力矩。
引信滚转角的动力学模型可表示为[7]:
(1)
式(1)中,JFuze为引信极转动惯量,ωx_Fuze为引信滚转角速率,γFuze为引信滚转角,δx为引信导转翼面偏转角,Mxcpl为弹丸与引信之间的耦合力矩,c1和c3为引信滚转角运动动力系数,c1和c3可表示为:
(2)
由式(2)可以看出,引信的滚转角控制可以通过调整导转翼面偏转角δx以改变引信气动导转力矩来实现,也可以通过调整弹丸与引信之间的耦合力矩Mxcpl来实现。以美国PGK为代表的基于电磁力矩的滚转控制方式便是采用调整弹丸与引信之间的耦合力矩来对引信滚转角进行控制[3];以南非AcuFuze为代表的基于气动力矩的滚转控制方式采用调整导转翼面偏转角来对引信滚转角进行控制[5]。
1.2 PID控制器
PID(比例(proportion)、积分(integral)、微分(derivative))控制方法属于一种经典控制方法,在航空航天领域已经应用到了众多工程实践项目当中,并且有着很好的控制效果,同时具有较好的抗干扰能力,其控制算法复杂度较低,工程可实现性较强,PID控制是一种技术非常成熟的控制方法[8]。
PID控制算法表达式如式(3)。
(3)
式(3)中,kp表示比例系数,表示Ti积分时间常数,Td表示微分时间常数,x*(t)表示所要控制量的期望值,x(t)表示所要控制量的实测值。
2 乒乓舵PID控制方法
根据式(1)引信滚转角的动力学模型,采用角速度和角度双环PID控制的思想对引信滚转角进行控制,控制系统框图如图2所示。
角速度回路PID控制器采用纯比例环节,输出量为舵机控制指令,t时刻引信滚转角控制所需要的滚转角控制力矩大小CtrCmd_η(t)可表示为:
CtrCmd_η(t)=Kωp·[ωfc(t)-ωf(t)]
(4)
式(4)中,kωp为角速度回路比例系数,ωfc(t)为t时刻角速度回路指令,ωf(t)为t时刻实测角速度值。
角度回路PID控制器采用比例积分环节,输出量为角速度控制回路指令ωfc(t),可表示为

(5)
式(5)中,Kγp为角度回路比例系数,Kγi为角度控制回路积分系数,γfc(t)为t时刻滚转角指令,γf(t)为t时刻实测角度值,Δt为采样周期。
从式(4)和式(5)中可以看出,引信滚转角的控制量的大小CtrCmd_η(t)是随着引信滚转角以及滚转角速率的状态不断变化的,大小是随机的。由于乒乓舵控制舵面进行正负极性换向,为了使乒乓舵实现这种随机的控制量,需要对其进行线形化。
通过在一个指令周期内对乒乓舵换向时间进行调整,利用平均效应产生一个大小连续可调的气动控制力矩的方法对乒乓舵进行控制,产生线性可调的控制量CtrCmd_η(t)。具体控制策略如下:引信滚转角控制周期记为Tc,每个控制周期内舵机换向控制时间记为Ts,舵机从一个极性位置运动到另外一个极性位置需要的时间为Thx。导转翼面在控制周期起始时刻极性位置的角度记为δ0,控制时序可表示为图 3。
由图 3中可以得出舵面正向偏转对应的控制信号占空比η的表达式:
(6)
由式(6)可得,欲产生正向占空比为η的控制量时,对应的控制周期内的换向时间Ts的可表示为:
(7)
式(7)中,sign(δ0)为δ0的符号函数,δ0为正时sign(δ0)值为1,δ0为负时sign(δ0)值为-1。
结合式(4)、式(5)和式(7)可以得到一个控制周期内乒乓舵换向时间控制指令Tsc,可表示为
(8)
这样便可以采用式(8)通过调整乒乓舵在每一个控制周期内换向时间控制指令Tsc,等效产生t时刻引信滚转角控制所需控制量CtrCmd_η(t),实现基于乒乓舵的引信滚转角控制。
3 仿真和实验验证
对上述基于乒乓舵的引信滚转角控制方法进行软件仿真以及风洞试验验证。软件仿真时,引入了滚转角测量误差、乒乓舵换向延时误差以及引信动力系数误差等多项误差源,如表 1所示。
表1 基于乒乓舵的引信滚转角控制方法仿真误差
Tab.1 Thesimulation errors of roll angle control system on 2-D trajectory correction fuze

误差类型误差均值误差均方差滚转角测量误差/(°)03.5滚转角速率测量误差/((°)/s)080控制换向延时误差/ms30.5动力系数c1误差02动力系数c3误差0500耦合力矩/(N·mm)265
仿真步长取0.1 ms,对控制系统进行了500次软件仿真,滚转角控制系统调节时间、滚转角控制的系统误差及误差均方差的平均值如表 2所示。滚转角变化曲线如图 4所示。
表2 基于乒乓舵的引信滚转角控制方法仿真结果
Tab.2 The simulation results of roll angle control system on 2-D trajectory correction fuze

滚转角指令/(°)滚转角控制系统调节时间/s滚转角控制系统误差/(°)滚转角控制误差均方差/(°)00.22-0.683.7900.250.583.81800.2-0.523.72700.210.643.6
风洞试验验证前,对二维弹道修正引信的测量误差以及控制误差进行了试验室测试,测试结果如表 3所示。
将二维弹道修正引信水平固定在风洞试验舱中,调整引信姿态使得来流与弹轴平行。进行了0.8Ma以及1.2Ma下的滚转角控制试验,试验结果如表 4所示,滚转角变化曲线如图 5所示。
表3 基于乒乓舵的引信实测误差
Tab.3 The actual bias of 2-D trajectory correction fuse
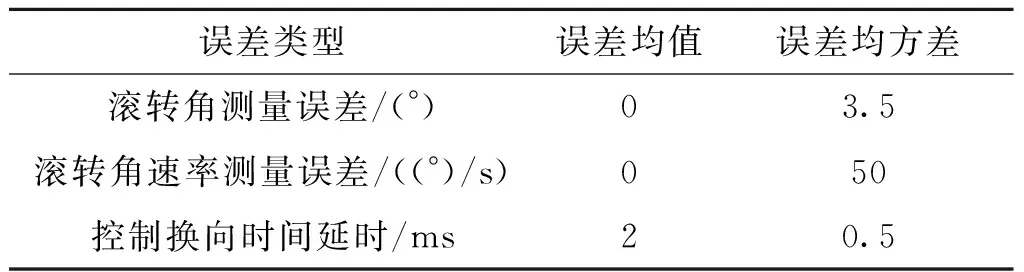
误差类型误差均值误差均方差滚转角测量误差/(°)03.5滚转角速率测量误差/((°)/s)050控制换向时间延时/ms20.5
表4 基于乒乓舵的引信滚转角控制方法风洞试验结果
Tab.4 The wind tunnel test result of roll angle control system on 2-D trajectory correction fuse

Ma滚转角指令/(°)滚转角控制系统调节时间/s滚转角控制系统误差/(°)滚转角控制误差均方差/(°)0.800.150.036.30.8900.140.037.20.81800.140.915.50.82700.160.727.41.200.15-0.695.71.2900.150.126.41.21800.140.267.61.22700.16-0.345.8
通过上述结果可知,无论是软件仿真还是风洞试验,采用基于乒乓舵的引信滚转角控制方法可以将滚转角控制的误差均方差控制在8°以内,系统误差不超过1°。
4 结论
本文提出了二维弹道修正引信基于乒乓舵的引信滚转角控制方法,通过对乒乓舵进行线性化,采用角速率环比例控制和角位置环比例积分控制这种乒乓舵PID控制器产生所需滚转控制力矩,实现对二维弹道修正引信的滚转角控制。仿真和试验结果表明,基于乒乓舵可对引信滚转角进行有效的控制,误差均方差小于8°。拟将经典控制理论与现代控制理论相结合,从控制器设计角度对本文提出的方法进行进一步优化,提高控制精度。
参考文献:
[1]Wang Yi, Song Wei dong. Guidance and Control Design for a Class of Spin-Stabilized Projectiles with a Two-Dimensional Trajectory Correction Fuze[J]. International Journal of Aerospace Engineering, 2015(ID908304):1-15.
[2] Spilios Theodoulis, Florian Sève. Robust gain-scheduled autopilot design for spin-stabilized projectiles with a course-correction fuze[J]. Aerospace Science and Technology, 2015(42): 477-489.
[3] Ahmed Elsaadany, Yi Wenjun. Accuracy Improvement Capability of Advanced Projectile Based on Course Correction Fuze Concept[J]. The Scientific World Journal, 2014(ID273450): 1-10.
[4] Bybee T. Precision Guidance Kit[C]//45th Annual NDIA Gun and Missile Systems Conference. Dallas: NDIA, 2010.
[5] Viljoen T, Plessis R L.Despin and Roll Attitude Control of 2D Guided Fuze Kit[C]// 26th International Symposium on Ballistics. Miami: International Ballistics Soceity,2011.
[6] 周彦, 周凤岐, 周军. 旋转导弹单通道控制方法研究[J].飞行力学, 2000(4):50-53.
[7] 雷泷杰, 陈瑞华, 霍鹏飞,等. 基于线性二次型调节器算法的滚转角控制方法[J]. 探测与控制学报, 2016,38(1): 33-36.
[8] 胡寿松. 自动控制原理[M]. 北京:科学出版社, 2013.
