乘用车H臂悬架C特性的稳健性优化设计
2018-06-13曹开斌廖抒华刘锦武
曹开斌, 廖抒华,刘锦武
(1.广西科技大学汽车与交通学院,广西柳州 545006;2.柳州孔辉汽车科技有限公司,广西柳州 545006)
0 引言
悬架C特性是指当轮胎受到地面的反作用侧向力、纵向力和回正力矩时,产生悬架弹性变形引起车轮定位参数随力或力矩变化的规律[1-2]。现代大量汽车悬架采用橡胶衬套,而悬架C特性对整车操稳性能有着重要影响[3]。文献[4-5]中研究了衬套刚度与悬架柔性特性指标之间的关系;文献[6]中通过自适应进化算法对多连杆悬架K&C特性进行优化分析,改善了车辆的操纵稳定性;文献[7]中基于田口方法对麦弗逊悬架硬点进行优化,提高了悬架的运动学特性。
作者以某乘用车H臂多连杆悬架为研究对象,针对样车在底盘调校阶段所存在的问题,利用ADAMS建立悬架模型,并与Isight联合仿真对衬套刚度进行灵敏度分析,筛选设计变量。考虑到悬架安装误差影响,在田口方法的基础上,采用AHP法确定目标函数,通过正交试验设计对H臂悬架进行多目标稳健性优化,探究一种可改善悬架性能且缩短调校周期的有效方法。
1 H臂悬架模型的建立与验证
1.1 悬架模型建立
以某乘用车的H臂多连杆后悬架作为分析对象,该悬架系统由束角控制臂、外倾控制臂、H型控制臂、减振器、弹簧和轮毂支架等结构组成。通过ADAMS软件建立悬架仿真模型,如图1所示。模型中硬点和衬套刚度数值由样车实测得到,用Fx、Fy表示衬套的径向刚度,Fz表示衬套的轴向刚度,Tx、Ty表示衬套绕径向的扭转刚度,Tz表示绕轴向的扭转刚度。主要分析图1中的前束控制臂衬套1、2,外倾控制臂衬套3、4,H型控制臂衬套5~8,对悬架C特性的影响。
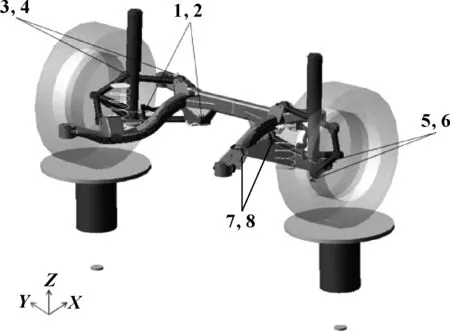
图1 H臂悬架模型
1.2 悬架模型仿真与试验验证
通过对样车进行悬架K&C试验测试,将实测结果与仿真结果对比分析,验证所建模型的准确性。图2、3分别反映了侧向力工况下前束角、轮距的变化。考虑到实车试验中衬套存在迟滞现象,仿真和试验分析结果有一定的偏差。由数据分析得出,仿真和试验中的前束角与侧向力斜率均值偏差为6.12%,轮距变化与侧向力斜率均值偏差为4.33%,说明所建模型的精准性。对悬架其他工况进行对比分析,结果均可达到满意的精度。
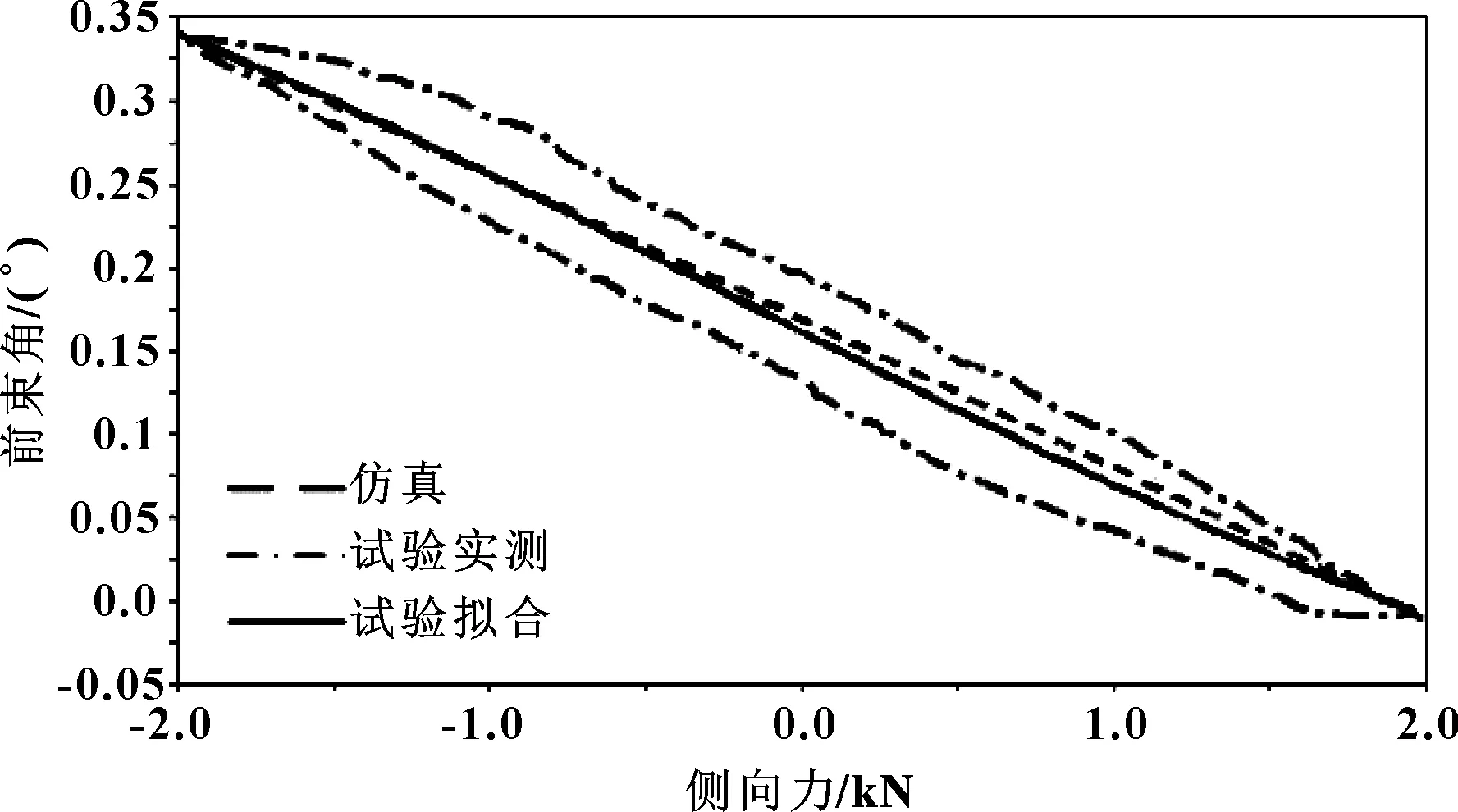
图2 前束角变化

图3 轮距变化
2 田口稳健性设计基本理论
产品质量稳健性是指产品质量特性抵抗不确定性干扰因素的能力,即其特性对设计参数和噪声因素在一定范围内变化时的不敏感性[8-9]。当产品质量特性值与目标值有偏差时,就认为有质量损失。其质量损失函数为:
L(y)=K(y-y0)
(1)
式中:y为产品质量特性值;y0为质量特性目标值;K为质量损失系数。
因y具有随机性,假设y服从正态分布y~N(μ,σ2),衡量产品质量的平均质量损失函数为:
E{L(y)}=E[K(y-y0)2]=K(σ2+δ2)
(2)
式中:μ为质量特性均值;σ2为质量特性方差;δ为质量特性绝对偏差。
稳健性优化设计要求均值尽可能达到目标值,使δ最小;同时还要求由各种干扰因素引起波动的方差σ2尽可能小。
田口法用信噪比(S/N)的大小衡量产品稳健性,并将可控因子和噪声因子通过正交试验设计方法与其相结合,找出最佳参数设计组合,使产品质量特性更加稳健。
对于悬架弹性运动学特性,其质量特征要求:不取负值,越小越好,目标值为0。这种质量特征称为望小特性,其平均质量损失函数为:
(3)
式中:yi为悬架弹性运动学特性的质量特性值;n为悬架弹性运动学特性的质量特性个数。
信噪比定义为:
(4)
式中:αSN为信噪比值。
信噪比越大,说明质量损失越小,产品质量越好。
3 悬架C特性稳健性设计
3.1 灵敏度分析确定设计变量
衬套刚度灵敏度分析通过Isight软件和ADAMS软件联合仿真来完成。在Isight软件中采用Latin Hypercube法进行试验设计,找出对悬架C特性影响显著的因素。将衬套刚度作为变量,在同向回正力矩、同向侧向力、同向纵向力3个工况下分析悬架C特性,以“前束角/回正力矩”“外倾角/侧向力”“前束角/侧向力”“轮心Y向位移/侧向力”“轮心X向位移/纵向力” 和“前束角/纵向力”的斜率均值为响应目标。由于H臂悬架衬套较多,从8个衬套共48个参数中初步筛选出12个对悬架C特性影响较大的参数;再对这12个参数进行灵敏度分析,将灵敏度高于9%的参数变量视为影响因子,同时列出影响数量,结果参见表1。衬套刚度变化系数作为自变量,初始值为1,其变化域为[0.5,2]。
变量定义:
T1为“前束角/回正力矩”的斜率均值;
T2为“外倾角/侧向力”的斜率均值;
T3为“前束角/侧向力”的斜率均值;
T4为“轮心Y向位移/侧向力”的斜率均值;
T5为“轮心X向位移/纵向力”的斜率均值;
T6为“前束角/纵向力”的斜率均值;
F1为外倾控制臂内点衬套Y向径向刚度;
F2为外倾控制臂外点衬套Y向径向刚度;
F3为H型控制臂前内点衬套X向径向刚度;
F4为H型控制臂前外点衬套X向径向刚度;
F5为H型控制臂前外点衬套Y向径向刚度;
F6为H型控制臂前外点衬套Z向径向刚度;
F7为H型控制臂后内点衬套Y向径向刚度;
F8为H型控制臂后外点衬套X向径向刚度;
F9为H型控制臂后外点衬套Y向径向刚度;
F10为H型控制臂后外点衬套Z向径向刚度;
F11为束角控制臂内点衬套Y向径向刚度;
F12为束角控制臂外点衬套Z向径向刚度。
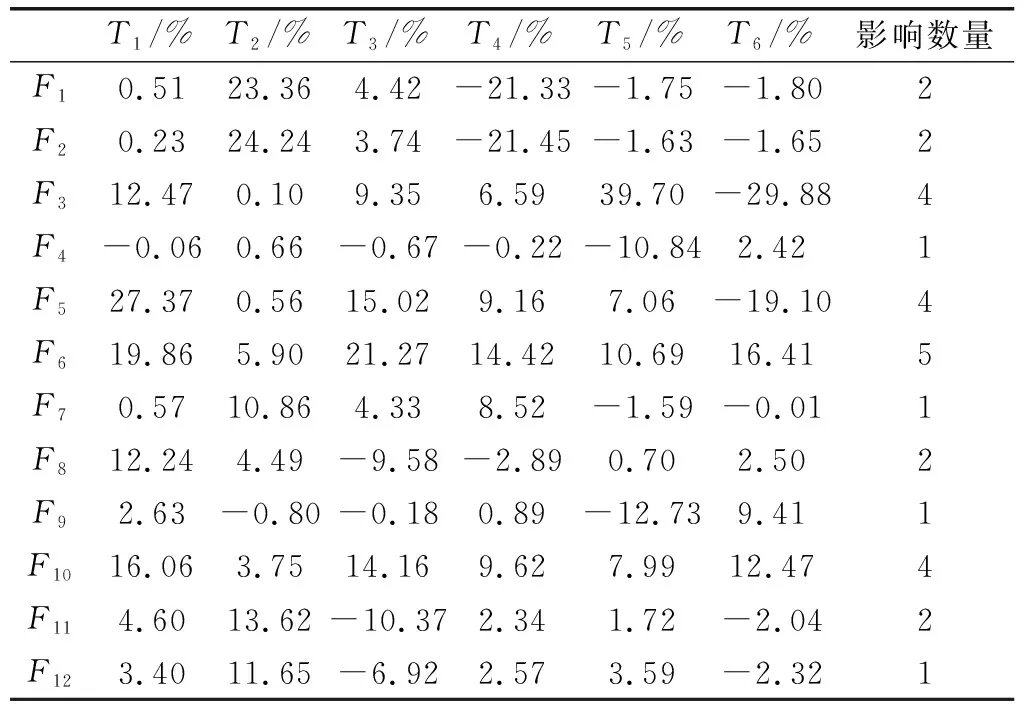
表1 悬架C特性灵敏度分析结果
根据表1,将影响数量不小于2的参数变量F1、F2、F3、F5、F6、F8、F10和F11作为控制因子;同时考虑到悬架安装硬点误差,把外倾控制臂内点Y向坐标值、减震器下点Z向坐标值、减震器上点Z向坐标值和束角控制臂内点Y向坐标值作为噪声因子,悬架安装硬点允许误差取为±1 mm。
3.2 基于AHP法确定目标函数
根据竞品车数据库综合考虑设定该H臂悬架C特性响应的理想值范围,如表2所示。
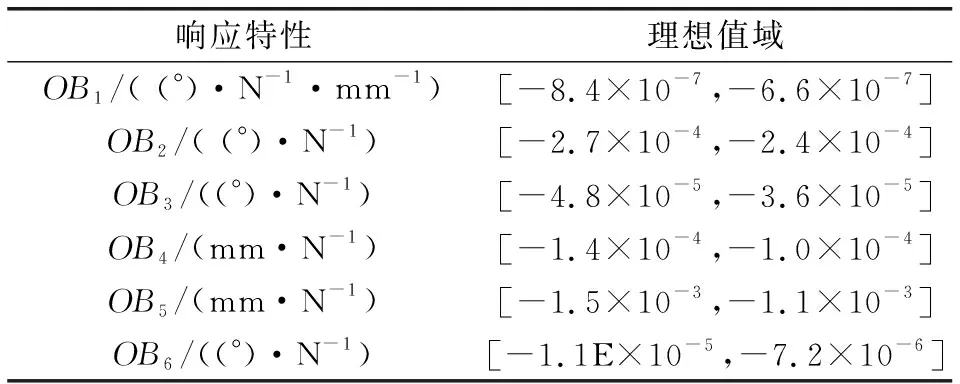
表2 响应特性的理想值域
悬架C特性评价指标确定:
(5)
式中:OBi为响应特性量化后的理想值;Ti为悬架系统实时输出响应特性。
结合工程实践经验,采用层次分析法(AHP)对6项特性按1-9比较尺度进行两两比较,构造判断矩阵,计算各响应对C特性的权重,并由判断矩阵得出的最大特征根λmax。
从文献[10]的平均随机一致性指标R.I(见表3)中找到相应的平均随机一致性指标;通过计算一致性指标C.I=(λmax-n)/(n-1)及一致性比率C.R=C.I/R.I对判断矩阵进行可行性分析。当C.R>0.1时,应修正判断矩阵;当C.R<0.1时,可接受判断矩阵的一致性,结果参见表4。

表3 1-9阶正反矩阵计算1 000次

表4 成对比较矩阵及一致性检验
悬架弹性运动学特性目标函数:
(6)
式中:ωi为各响应特性的权重。
根据工程经验结合K&C试验数据分析,目标函数响应值越小越好。
3.3 基于田口法的稳健性优化设计
根据上述已确定的可控因子和噪声因子,不考虑参数间的交互作用,进行正交实验设计。控制因子试验采用正交表L32(38),噪声因子采用正交表L8(24),总试验次数达256次。由于一次田口方法得到的因素水平可能与最优值存在较大差距,不能满足精度要求。为提高因素的精度范围,第二次田口因素水平基于第一次田口分析的结果进行选择,并再次进行试验分析,得到该试验设计的Pareto解集,如图4所示。

图4 Pareto解集
从图4可以看出:试验设计后在同向回正力矩、同向侧向力、同向纵向力3个工况下的“前束角/回转力矩”斜率均值范围为[-1.067×10-6,-6.569×10-7],“外倾角/侧向力” 斜率均值范围为[-2.945×10-4,-2.329×10-4],“前束角/侧向力” 斜率均值范围为[-9.879×10-5,-3.508×10-5],“轮心Y向位移/侧向力” 斜率均值范围为[-2.529×10-4,-8.158×10-5], “轮心X向位移/纵向力” 斜率均值范围为[-0.002,-0.001] ,“前束角/纵向力” 斜率均值范围为[-4.607×10-5,4.296×10-5]。与表2进行对比,该Pareto解集已完全覆盖响应特性理想区间。
同时得到目标函数均值主效应和信噪比主效应如图5、图6所示。响应值越小,悬架C特性越好;信噪比越大,悬架性能稳健性越高。
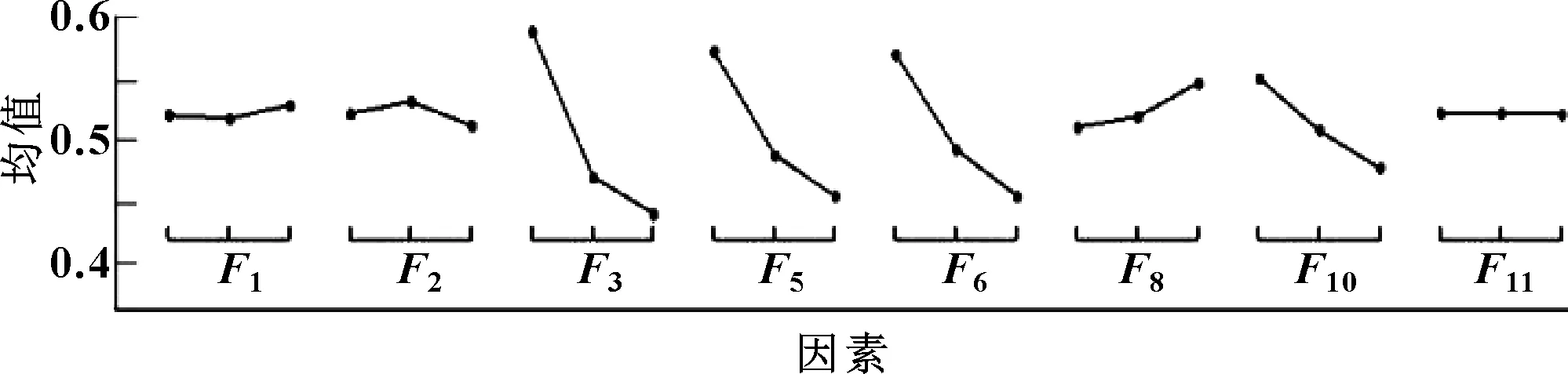
图5 目标函数均值主效应图
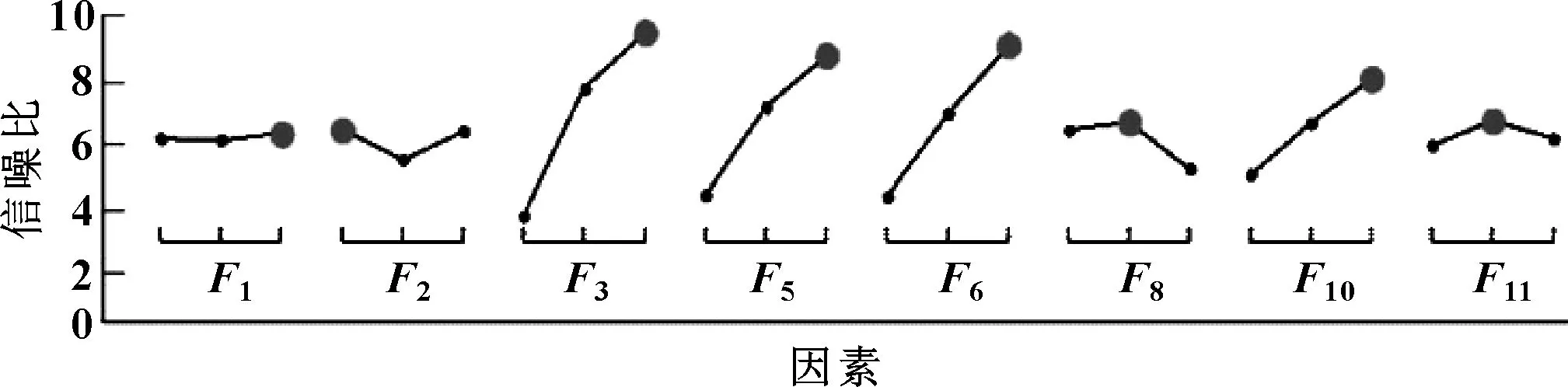
图6 信噪比主效应图
综合考虑均值和信噪比,选取可控因子最佳水平组合如表5所示。

表5 可控因子最佳水平组合
4 优化结果分析与验证
根据稳健性优化结果,与优化前的悬架C特性进行比较,如表6所示。可以看出:悬架在同向回正力矩、同向侧向力、同向纵向力3个工况下前束角、外倾角、轮距和轴距的变化均值均在目标值范围内,说明悬架弹性运动学特性有较大改善。
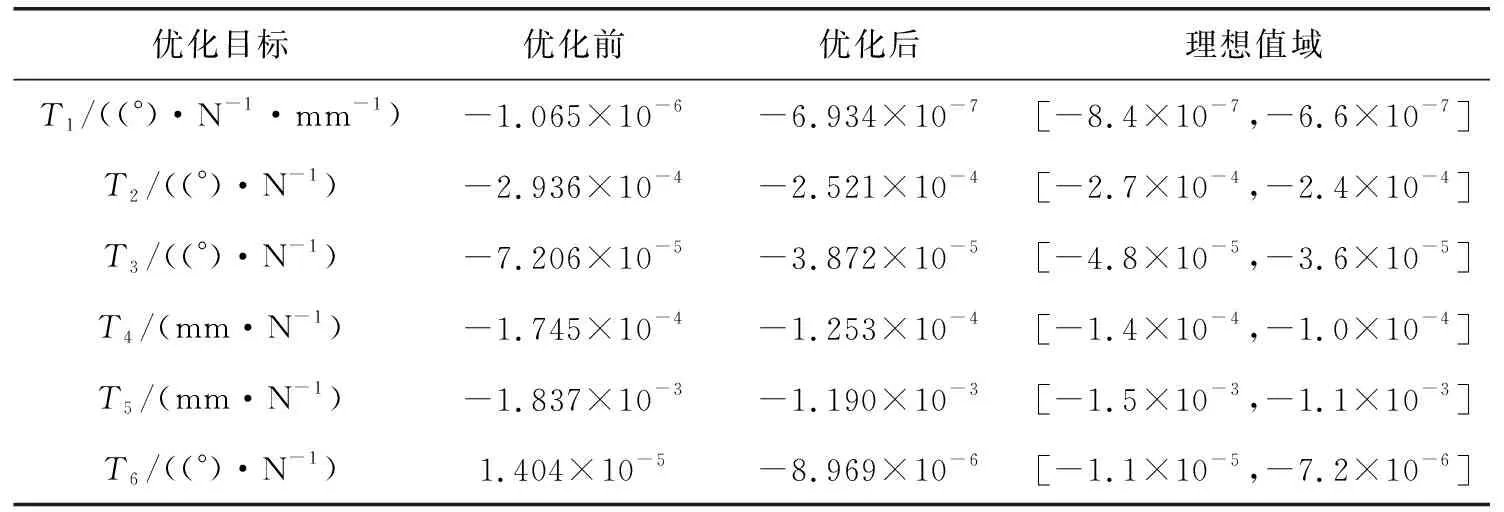
表6 优化结果分析
为证明优化结果的有效性,对优化前后的稳健性采用简单随机抽样方法进行蒙特卡罗验证,采取1 000个样本点,结果如图7所示。由验证结果可以看出:在考虑悬架硬点安装误差的同时,各响应的方差也有所减小,表明优化后悬架性能的稳健性有明显提高,证明了优化方法的有效性。
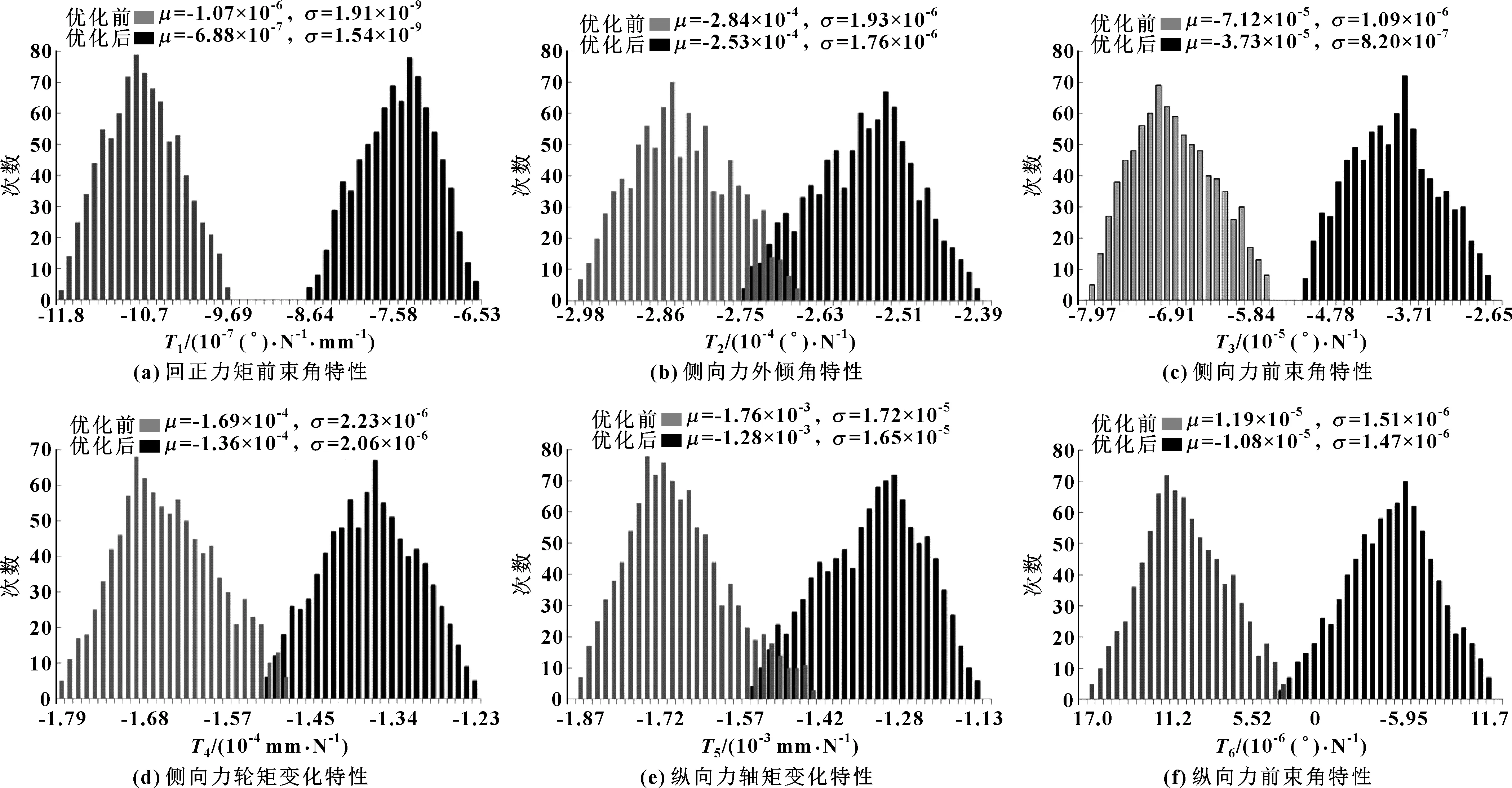
图7 优化前后目标响应的概率分布
5 结束语
对某乘用车H臂多连杆悬架C特性进行稳健性优化设计,得出以下结论:
(1)采用AHP法,以工程师评分的方式将主观评价因素量化,并通过一致性检验,使得响应目标具有统一性。优化结果达到悬架C特性的目标值域,证明了该方法的有效性。
(2)在样车调校阶段,通过Isight与ADAMS联合仿真,采用田口方法对H臂多连杆悬架进行稳健性优化设计,选出最佳水平组合。研究结果表明:该方法相比于传统反复调整衬套刚度的经验法,衬套调试周期由一周缩短至1~2个工作日,提高了工作效率,节约了开发成本,同时为整车性能分析提供有效的指导。
参考文献:
[1]KANG J S,YUN J R,LEE J M.Elasto-kinematic Analysis and Optimization of Suspension Compliance Characteristics[R].SAE Paper 970104.
[2]BLUNDELL M V.The Influence of Rubber Bush Compliance on Vehicle Suspension Movement[J].Materials and Design,1998,19(1/2):29-37.
[3]MITCHELL W C,SIMONS R,SUTHERLAND T,et al.Suspension Geometry:Theory vs.K&C Measurement[R].SAE Paper 2008-01-2948.
[4]高晋,杨秀建.衬套刚度对悬架C特性及瞬态操纵稳定性的灵敏度研究[J].汽车技术,2013(11):33-37.
GAO J,YANG X J.Sensitivity Study of Bushing Stiffness Affecting Suspension Compliance Characteristics and Transient Handling Stability[J].Automobile Technology,2013(11):33-37.
[5]彭亚琪,熊锐,吴坚,等.衬套刚度对多连杆悬架弹性运动学特性的影响[J].现代制造工程,2015(10):127-132.
PENG Y Q,XIANG R,WU J,et al.Effects of Bushing Stiffness to the Compliance Characteristics of Multi-link Suspension[J].Modern Manufacturing Engineering,2015(10):127-132.
[6]孙礼.多连杆后悬架K&C性能的一种优化分析方法[C]//中国CAE工程分析技术年会论文集,2011:105-110.
[7]张瑛,吴光强.基于田口方法的汽车悬架稳健性优化[J].机械与电子,2015(9):3-7.
ZHANG Y,WU G Q.Robust Design Optimization of the Automotive McPherson Suspension Based on Taguchi Method[J].Machinery & Electronics,2015(9):3-7.
[8]KANG D O,HEO S J,KIM M S.Robust Design Optimization of the McPherson Suspension System with Consideration of a Bush Compliance Uncertainty[J].Journal of Automobile Engineering,2010,224(6):707-716.
[9]ZANG C,FRISWELL M I,MOTTERSHEAD J E.A Review of Robust Optimal Design and Its Application in Dynamics[J].Computers and Structures,2005,83(4/5):315-326.
[10]彭国甫,李树丞,盛明科.应用层次分析法确定政府绩效评估指标权重研究[J].中国软科学,2004(6):136-139.
PENG G F,LI S C,SHENG M K.AHP in Evaluating Government Performance:Determining Indicator Weight[J].China Soft Science,2004(6):136-139.
