面向水上机器人的水黾运动观测
2018-06-01田为军王骥月张兴旺
田为军,王骥月,李 明,张兴旺,张 勇,丛 茜,4
(1.吉林大学 工程仿生教育部重点实验室,长春 130022;2.山东科瑞石油装备有限公司,山东 东营 257067;3.长春光华学院 电气信息学院,长春 130033;4.吉林大学 汽车仿真与控制国家重点实验室,长春 130022)
0 引 言
作为仿生学中极具代表性的仿生原型,水黾因其独具特色的水上运动灵活性和高效性,受到研究学者的广泛关注。目前,针对水黾的研究主要集中于水黾腿部结构及疏水性[1-4]、水黾腿部物质成分及性质[5,6]、水黾的流体动力学特性[7]、水黾运动方式及过程[8-10]、水黾肌肉分布及功能[11,12]等方面。以上研究的主要目的是进行仿水黾机器人设计及制造[13-16]。而水上小型机器人则更多地是模仿水黾的重要物理特性[17,18],理解水黾的物理特性并研究其运动机制,有助于水上行走机器人的设计。水上行走机器人的设计需要同时满足两个条件:①需要在水上保持稳定运动;②需要通过腿的划水实现水上运动[19]。采用凸轮连杆机构可以使水上机器人的腿部机构实现与水黾一样的空间椭圆运动轨迹,并且能够稳定自由地实现各种步态下的运动[20,21],微型驱动马达和超疏水腿的设计,使得水上机器人可以像水黾一样在水面自由运动[22]。水黾在水面跳跃时会将腿扫向内侧,使其腿压向水面的时间最大化,从而使得总体用力最大化,对水黾的水面跳跃运动进行研究有助于实现水上机器人在水面的腾跃[23]。
水上行走机器人在复杂环境下运行时,会由于环境限制或某些腿部结构发生故障,导致某些腿部机构无法实现其功能,因此,如何调整剩余腿部机构的运行,来实现代偿功能,以适应新的运动模式,对于提高水上行走机器人的环境适应性具有重要意义。研究人员采用截肢的方法对机器人的仿生原型进行研究,分析截肢后的运动规律。Hughes[24],Wilson[25]以及Delocmyn[26-28]对六足昆虫进行截肢,以观测昆虫在六足无法同时使用时如何进行自我调整;Zhang等[29,30]采用前足去除法,分析了蝼蛄前足的功能以及去除前足后蝼蛄中、后足的代偿作用,为有足多功能机器人的设计提供了仿生设计灵感,为认识具有特异足的昆虫的运动方式提供了思路。
由水黾运动过程可知,水黾在水上运动时,主要有滑行(Gliding motion)和跳跃(Leaping motion)两种运动形式,在运动过程中水黾各腿发挥着各自的作用,中腿只是运动动力源,前腿和后腿只起平衡作用[8]。
本文在现有研究结论的基础上,利用高速摄像机,获取水黾水上以及纸上运动视频,并提取水黾运动关节角。采用控制变量法,分别获取去掉前腿、中腿和后腿时,水黾在水上的运动情况,分析水黾各腿在其运动过程中的变化规律。通过水上直线运动规律分析,验证水黾各腿在运动中的作用;分析部分腿缺失后,其他各腿的运动规律和作用机理,为水上行走机器人腿部机构需要代偿情况时的运动规划提供设计参考;纸上运动的观测可以为水上行走机器人的水、陆两栖运动转换提供设计思路。
1 材料及方法
试验用水黾属昆虫纲,黾蝽科,长期生活在水面,取自吉林省长春市东北师范大学静湖,水黾平均体长为15 mm。
试验利用高速摄像机(Phantom v 9.1,美国)对水黾运动进行拍摄录制。试验观测系统由高速摄像机、电脑、照明系统和容器组成。
实验室温度为24 ℃,与水黾生活环境温度基本一致。水黾置于30 mm深的水容器中,容器底部放置坐标纸,用于数据的标定及测量。高速摄像机的镜头与水平面平行,同时调节镜头,确保水黾在观察视野中,其腿部各关节清晰可见。

图1 水黾关节角示意图Fig.1 Schematic diagram of joint of water strider
水黾由前腿、中腿、后腿和躯干构成。为更好地表述水黾运动,对水黾各部位及相关角度进行定义,如图1所示。主要环节定义如下:股节为各腿与躯干相连的环节;胫节为与股节相连接的环节。图1中,点1、2分别为中腿、后腿股节与躯干的交点;1、2连线定义为体轴。股节角(θ1、θ3、θ5、θ7)为股节与躯干的夹角;胫节角(θ2、θ4、θ6、θ8)为股节与胫节的夹角。
试验分为水黾水上直线运动(包括未处理腿、去掉前腿、去掉中腿和去掉后腿的水上直线运动)和纸上直线运动5组情况进行研究。高速摄像机拍摄水黾上述5种试验条件下直线自由运动的动态视频,截取完整运动周期进行处理。采用高速运动分析软件(TEMA,美国)拾取视频图片中水黾各关节点坐标,采用Matlab进行关节角度计算。水黾一个完整运动周期定义为同一观测腿由初始位置开始运动至恢复初始位置的过程。根据不同运动条件下水黾自由运动周期不同,设定水上直线运动、去掉前腿水上直线运动、去掉中腿水上直线运动、去掉后腿水上直线运动和纸上直线运动关节角提取间隔分别为0.01、0.006、0.006、0.007和0.005 s。
2 水黾运动观测
2.1 水上直线运动
水黾水上直线运动的一个完整运动周期定义为水黾的中腿由初始位置运动至恢复到初始位置的过程。图2为水黾水上自由直线运动一个周期的视频截图。由图2可知,水黾水上自由直线运动过程中,前腿外张与水面接触,以维持身体平衡,全周期内姿势基本不变;中腿先向后划水,而后抬起向前摆动复位;后腿始终与水面接触,先向内收缩,后向外扩张复位。图2中,(a)~(c)显示水黾处于划水状态;(d)~(i)显示水黾处于滑行状态,滑行过程中水黾中腿、后腿逐渐复位,躯干向前滑动。
2.2 去掉前腿水上直线运动
水黾去掉前腿水上直线运动的一个完整运动周期定义为水黾中腿由初始摆动开始至恢复到初始位置的过程。图3为去掉前腿的水黾水上直线运动一个周期的视频截图。由图3可知,去掉前腿后,水黾直线运动方式并未改变,中腿划水,后腿支撑躯干。图3中,(a)~(c)显示水黾处于划水状态;(d)~(i)为水黾处于滑行状态,其过程中,腿部逐渐复位滑行。

图3 水黾去掉前腿水上直线运动Fig.3 Linear motion on water surface with forelegs removal
2.3 去掉中腿水上直线运动
水黾去掉中腿水上直线运动的一个完整运动周期定义为水黾后腿由初始位置摆动至恢复到初始位置的过程。图4为去掉中腿的水黾水上直线运动一个周期的视频截图。由图4可知,去掉中腿后,水黾直线运动方式改变,由于失去了提供前进动力的中腿,后腿代替中腿作为驱动腿,前腿内收,在失去后腿配合的情况下,独立支撑躯干。图4中,前腿与后腿始终与水接触,全周期内前腿姿势基本不变,(a)~(c)显示水黾处于后腿扩张划水阶段;(d)~(i)显示水黾处于滑行状态,其过程中,后腿逐渐复位滑行。
管理并非空话。这17所小寺小庙规模小,而且大多是最近十来年内新建的,既没有出家僧人住持,也没有成熟的管理团队,当然,与宗教有关的法律法规的知识、观念和意识也十分薄弱。这些状况,让民族团结、宗教和谐存在很大隐患。
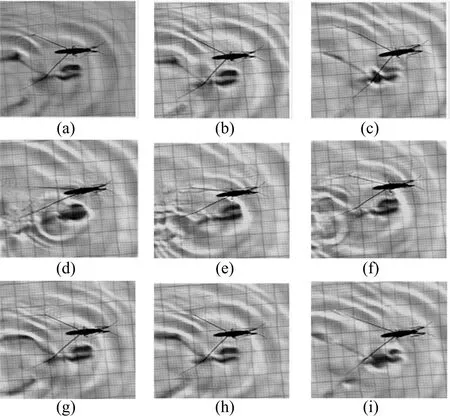
图4 水黾去掉中腿水上直线运动Fig.4 Linear motion on water surface with middle legs removal
2.4 去掉后腿水上直线运动
水黾去掉后腿水上直线运动的一个完整运动周期定义为水黾中腿由初始位置摆动至恢复到初始位置的过程。图5为去掉后腿的水黾水上直线运动过程一个周期的视频截图。由图5可知,去掉后腿后,水黾直线运动方式改变,由于失去了提供支撑力的后腿,为防止腹部下落与水面接触,在前腿独立支撑躯干的情况下,中腿缩短了摆动过程中脱离水面的时间。图5中,(a)~(d)阶段水黾前腿外张,辅助中腿支撑躯干并保持身体平衡,中腿向后摆动划水;(e)~(i)阶段水黾前腿收缩,独立支撑躯干滑行,中腿抬起向前摆动复位。
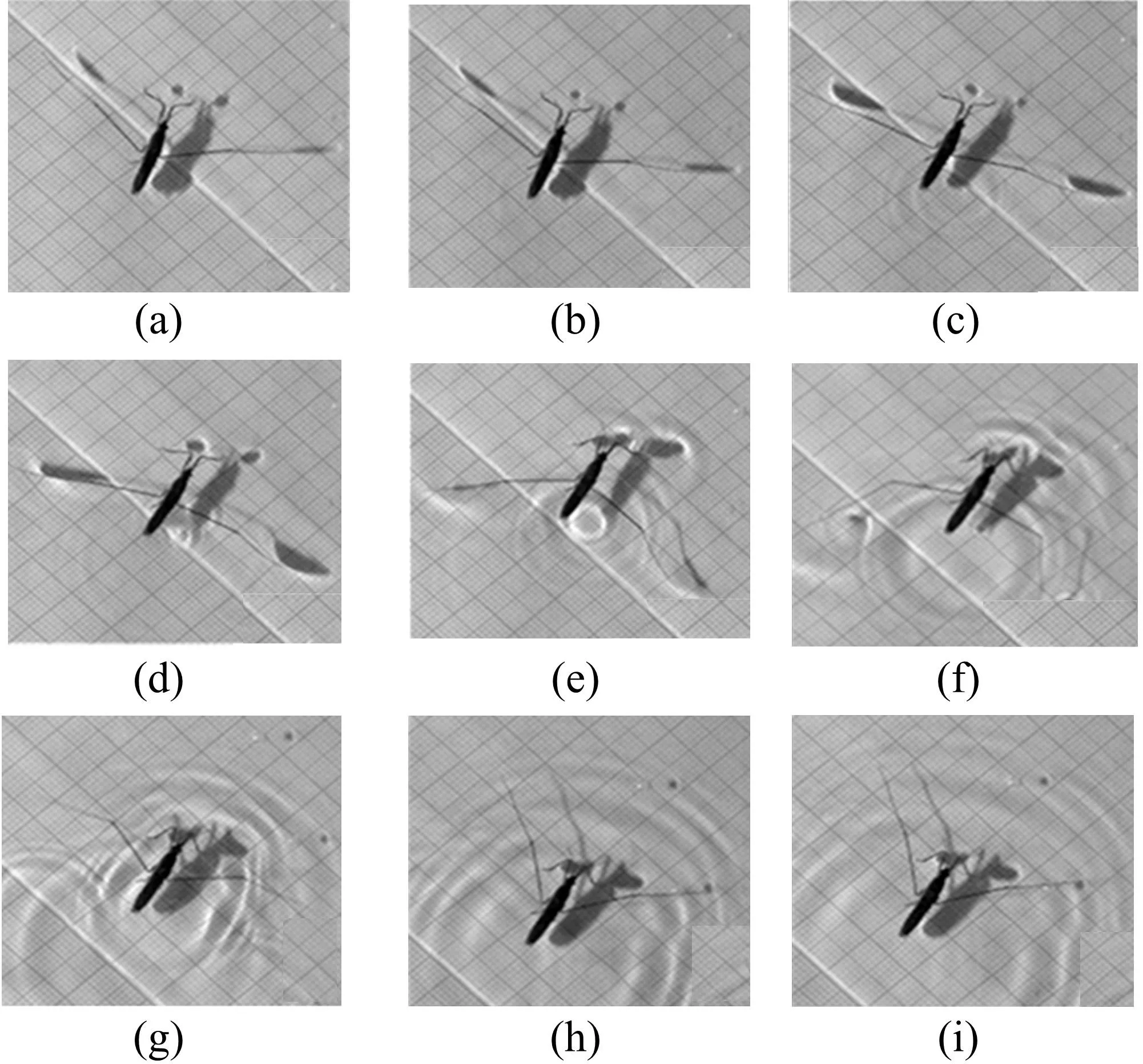
图5 水黾去掉后腿水上直线运动Fig.5 Linear motion on water surface with hind legs removal
2.5 纸上直线运动
水黾纸上直线运动的一个完整运动周期定义为水黾的中腿由初始位置摆动至恢复到初始位置的过程。图6为水黾纸上自由直线运动过程中一个周期的视频截图。与水上划水加滑行的运动方式不同,水黾纸上自由直线运动采用跳跃行进方式。图6中,水黾前腿外张,姿势始终不变。(a)~(d)阶段水黾跃起,中腿向后摆动提供前进动力,后腿收缩;(e)~(i)阶段水黾下落,中腿和后腿复位,保持身体着陆时的平衡。
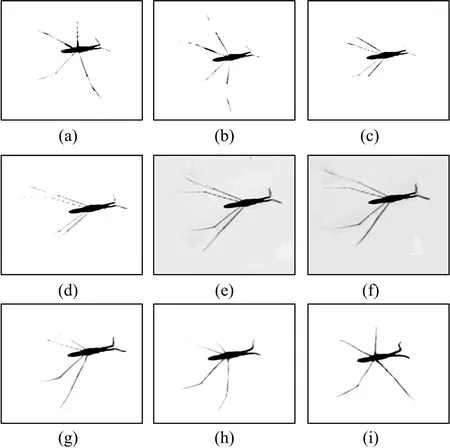
图6 水黾纸上直线运动Fig.6 Linear motion on paper
3 水黾运动机理分析
由高速摄像机摄录视频可以定性观察水黾不同状态下各腿的运动情况,解读水黾运动机理还需要进行定量分析。采用高速运动分析软件拾取视频图片中水黾各关节点的坐标,并进行关节角度计算。对关节角度进行定量分析,分析水黾运动过程中各腿的变化。
分别提取水黾水上直线运动、去掉前腿水上直线运动、去掉中腿水上直线运动、去掉后腿水上直线运动和纸上直线运动5种形式下,单个运动周期的股节角和胫节角。图7~图11为5组试验中各腿关节角随时间的变化曲线。
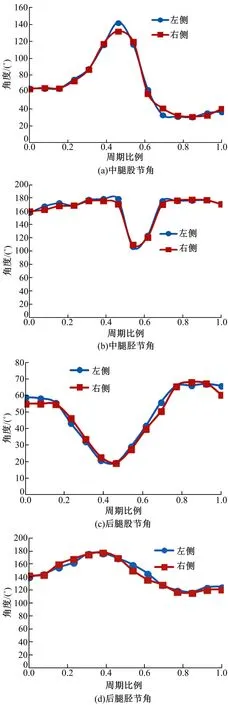
图7 水黾水上直线运动关节角Fig.7 Joint angles of linear motion on water
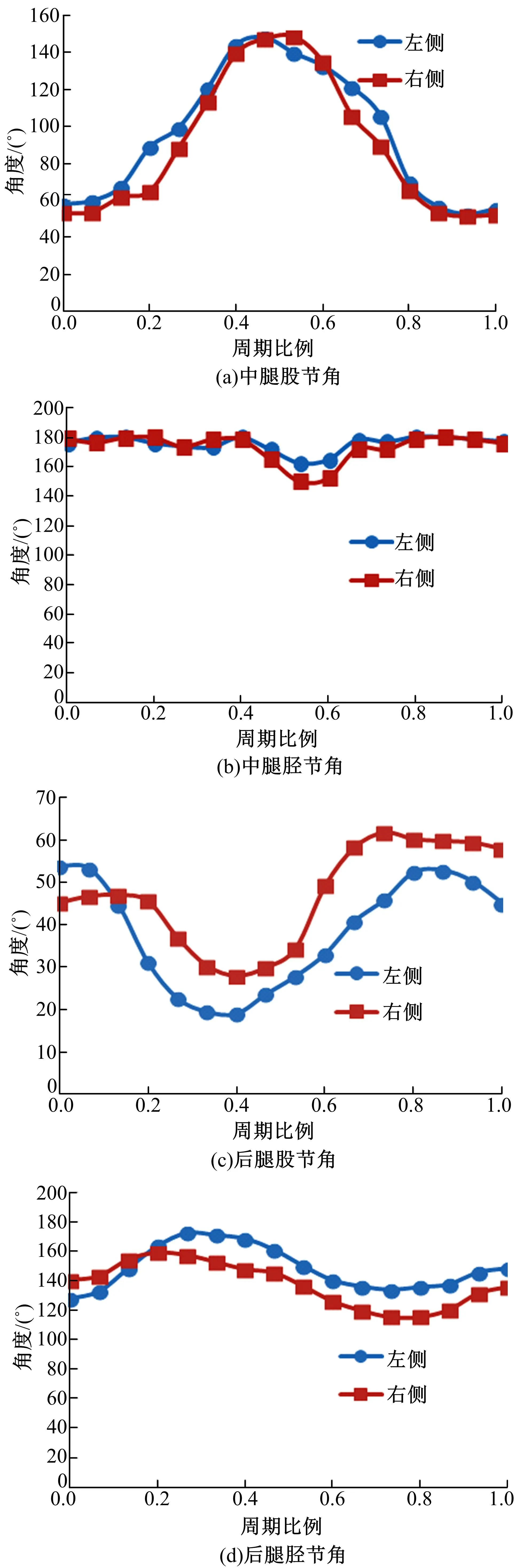
图8 水黾去掉前腿水上直线运动关节角Fig.8 Joint angles of linear motion on water with forelegs removal
3.1 水黾正常水上直线运动机理
由图7可知,水黾水上直线运动过程中,中腿和后腿动作左、右对称。结合图2可知,水黾中腿股节角在划水过程中逐渐变大,在完成向后划水动作并向初始状态回摆时达到最大值,约为140°;划水结束后,水黾进入滑行状态,中腿向前摆动,为下一次划水进行准备,这一过程中,股节角逐渐减小至初始值;而中腿胫节角在划水结束前,基本保持在170°左右,即股节与胫节几乎处于平直状态,仅在水黾划水与滑行两阶段过渡时,中腿胫节角才呈现先减小后增大趋势,并在股节角最大时胫节角达到最小值,约为100°。关节角变化说明水黾中腿主动划水,为前进提供动力,划水与滑行切换过程中,胫节角变化以适应水黾前行,减小前进阻力。后腿股节角与中腿股节角变化趋势相反,在中腿划水过程中,后腿股节角不断减小,至中腿股节角最大时达到最小值,约为18°,在水黾进入滑行状态后,后腿股节角增大至初始值,约为60°,与中腿股节角变化幅度(约100°)相比,后腿股节角变化幅度较小(约42°);后腿胫节角在120°~180°变化。水黾后腿在划水阶段内收并趋于平直,以减小前进阻力,在滑行阶段外张复位,以维持身体平衡,为中腿再次划水提供平稳环境。
3.2 水黾前腿缺失后的运动机理
对比图7与图8,去掉前腿后,水黾各关节角变化趋势未变,说明水黾运动模式并未改变;而后腿的左、右关节角重合度下降,即水黾运动过程中左、右后腿对称性下降,说明水黾运动平稳性下降,需要后腿进行不对称性的调整来维持平衡稳定;在变化幅度方面,中腿胫节角最小值由正常状态下的100°变为140°,说明水黾通过减少中腿胫节角变化幅度来降低身体晃动几率,增加自身对平稳的掌控。因此,去除前腿后的水黾运动平稳性降低,表明水黾前腿缺失后,需要通过降低中腿运动幅度以及调整后腿的不对称性来增加平衡控制力度,以保持运动过程中身体的平衡。
3.3 水黾中腿缺失后的运动机理
对比图7与图9,水黾去掉中腿后,后腿各关节角变化趋势不变,但股节角显著减小,且左、右腿同步性降低。结合图4可知,水黾用后腿代替中腿提供前进动力,因为失去一对中腿,水黾仅能用前腿和后腿维持平衡并划行,为保证在后腿划动过程中,身体不至晃动倾倒,水黾减小了后腿胫节角的变化幅度,使其始终保持在140°~180°,并减小了后腿股节角,使后腿股节近身划动。因此去除中腿后,即便后腿做出了划水的动作,但水黾在同样一次划水加滑行的完整周期内,前进距离大大缩短。胫节角变化幅度降低主要是由于后腿代替中腿进行划水推动时,为更有力地完成划水动作,推动身体向前运动,后腿股节与胫节更倾向于伸直状态。在运动过程中,水黾两后腿有主动运动过程,而正常直线运动状态下水黾后腿角度虽然也发生变化,但角度的变化主要是由于中腿的运动而带动后腿角度变化,为被动运动,其角度变化与中腿的摆动幅度有关,而去除中腿后,后腿在保持稳定性的同时,还需要代替中腿以非常规模式进行主动运动。由此可知,水黾中腿缺失后,需要利用后腿来代偿提供前进动力;同时,后腿股节摆动幅度降低,以避免代偿过程中离开水面时间过长而导致水黾失去平衡。

图9 水黾去掉中腿水上直线运动关节角Fig.9 Joint angles of linear motion on water with middle legs removal
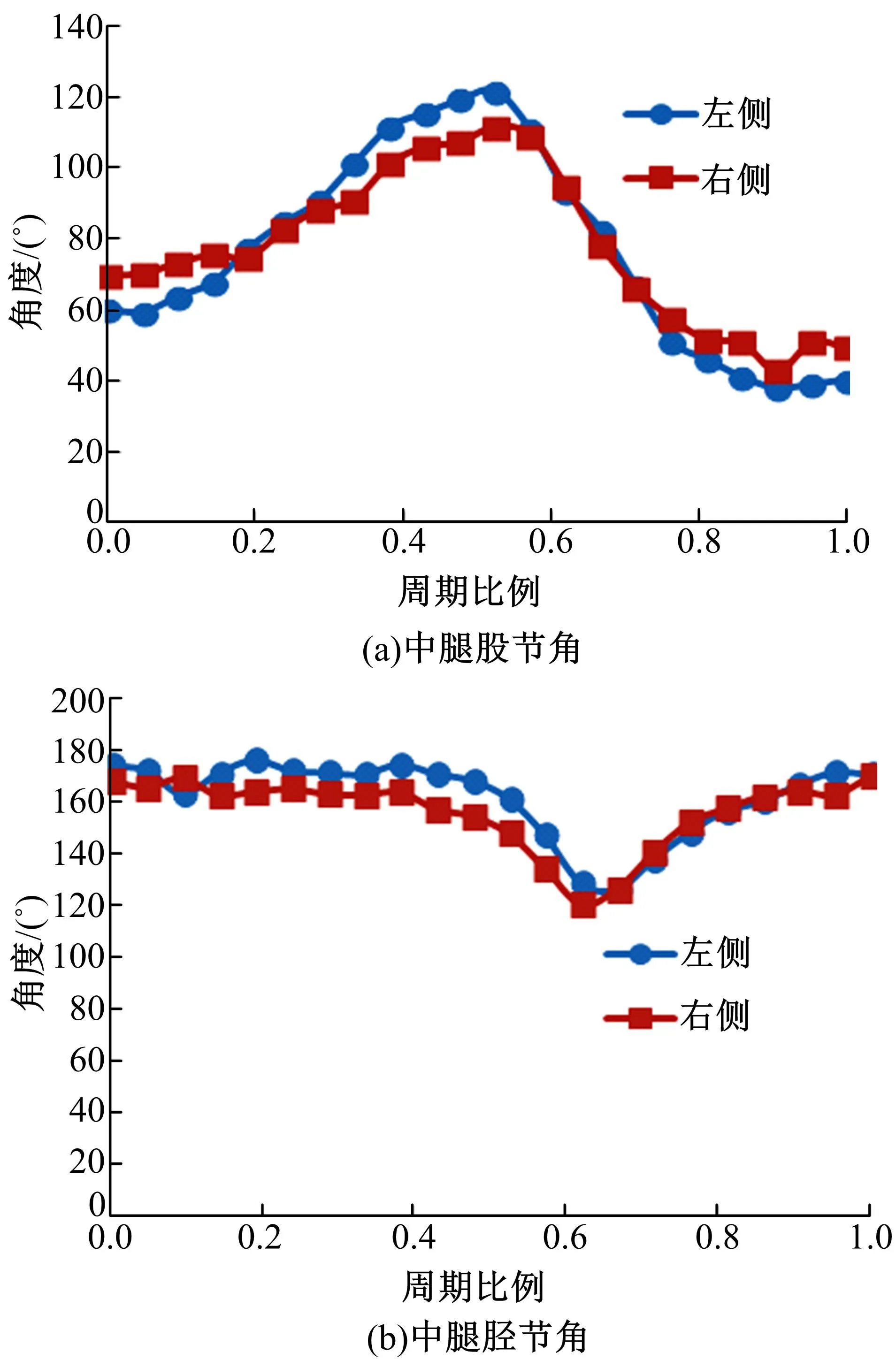
图10 水黾去掉后腿水上直线运动关节角Fig.10 Joint angles of linear motion on water with hind legs removal
3.4 水黾后腿缺失后的运动机理
对比图7与图10,水黾去掉后腿后,中腿动作幅度减小,中腿股节角最大值由正常状态下的140°减小到120°,中腿胫节角最小值由正常状态下的100°增加到120°。完整运动周期内,关节角变化趋势不变,左、右腿同步性略有降低,与图9去掉中腿时相比,左、右腿对称性低于正常状态但高于去掉中腿时的状态。由图5可知,去除两后腿后,水黾两前腿一直保持与水面接触,原因是缺少后腿支撑后,中腿运动时身体失去平衡,导致前腿不能抬起。
结合图5可知,水黾以减小中腿摆动幅度和维持左、右腿同步性的方式,保证身体在前进过程中的平稳。中腿胫节角最小值增大是由于失去后腿的水黾为使自身保持平衡且能迅速地恢复稳定状态,未将中腿股节与胫节完全收缩,以便水黾迅速稳定地完成下一周期的运动。同时,中腿股节角最大值减小,说明水黾划水幅度降低,这是由于在缺少后腿支撑的情况下,中腿划水过程中,腹部会越来越接近水面,为避免腹部与水面接触,中腿需尽快回复来支撑身体。由此可知,水黾缺少提供支撑力的后腿后,会以减小中腿摆动幅度的方式,来维持前进过程中的平稳性;同时,中腿会降低划水幅度,以避免腹部与水接触。
3.5 水黾纸上直线运动机理
对比图7与图11可知,水黾纸上运动时的关节角变化趋势与水上运动时完全不同,说明水黾纸上运动与水上运动方式不同。与水上运动相比,水黾在纸上运动时,左、右腿同步性略低;水黾中腿股节角先快速增大后缓慢减小,最大值约为150°,变化幅度约为100°;中腿胫节角和后腿胫节角变化平稳;后腿股节角呈波动上升趋势。结合图6可知,水黾在纸上跳跃前行,一个跳跃周期由跃起和下落两阶段构成,水黾中腿摆动与纸面摩擦提供起跳动力,中腿股节角快速增大表明中腿在快速提供跳跃动力,中腿股节向后摆动用时仅占五分之一周期,股节角达到最大值后,水黾开始跳跃。
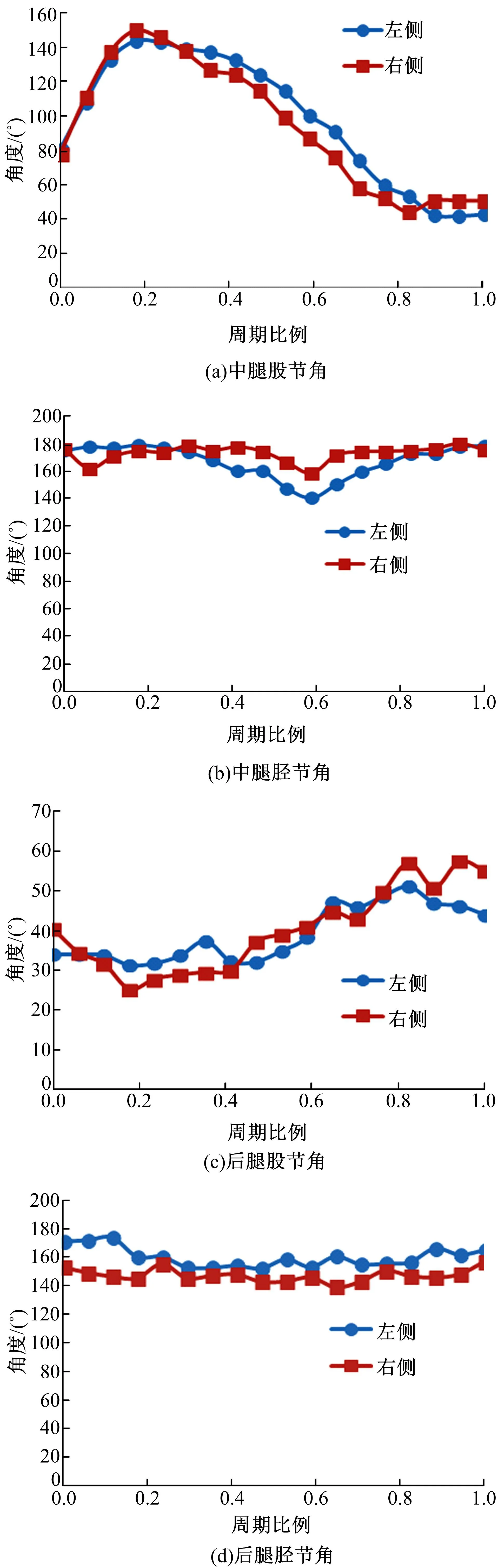
图11 水黾纸上直线运动关节角Fig.11 Joint angles of linear motion on paper
中腿在跳跃过程中,股节向前摆动,股节角逐渐变小,为着地做准备,由于股节摆动幅度大于胫节向前的摆动幅度,因此胫节角变小,之后为在着地时恢复股节与胫节的相对位置,以保持身体的平衡和稳定,胫节角逐渐增大到初始位置。胫节角变化范围比水面运动时的变化范围小,尤其是胫节角的最小值比水面运动时大,这是因为水黾在纸面上运动时,中腿股节与胫节由于没有在水面运动时的弹力,使水黾中腿股节与胫节的收缩过程相对较短,两节之间的夹角即胫节角的最小值相对较大。
水黾在纸上运动时,后腿各关节变化幅度均较小,水黾起跳后,两后腿随之离开纸面,在两后腿腾空阶段,后腿并未进行其他动作,故水黾两后腿各关节角度变化较小。因此,水黾在纸上运动时主要由中腿提供动力,后腿轻微摆动配合中腿控制身体在起跳、空中行进和着陆时的平衡。
4 结 论
通过分析水黾水上直线运动、去掉前腿水上直线运动、去掉中腿水上直线运动、去掉后腿水上直线运动和纸上直线运动5种运动状态的视频及关节角随时间的变化曲线,得到以下结论:
(1)正常状态下,水黾直线运动时左、右腿动作具有对称性,水上运动可分为划水和滑行两阶段,水黾中腿提供动力源,前腿起平衡作用,后腿起平衡支撑作用。
(2)去掉前腿会破坏水黾自身平衡,水黾通过降低中腿的运动幅度,并调整后腿的不对称来提高平衡控制力度,以保持运动过程中身体的平衡。
(3)去掉中腿后,由后腿代偿中腿提供前进动力,水黾自身稳定性受到影响,同一运动周期内,前进距离明显减小。
(4)去掉后腿会使水黾失去主要支撑力,中腿代替后腿,在提供前进动力的同时,起到支撑躯体的作用,并且中腿会减小动作幅度,以避免躯干与水面接触。
(5)纸上运动可分为跃起和下落两阶段,水黾左、右腿的同步性不及水上运动,并且动力由中腿提供,而后腿轻微摆动,配合中腿控制身体的平衡。
本文利用控制变量法,有针对性地研究了水黾缺失前腿、中腿、后腿后,其余各腿的调整规律,并观察了水黾的纸上运动情况,本研究可以为水上行走机器人的腿部机构代偿以及两栖运动转换提供设计参考。
参考文献:
[1] Gao Xue-feng, Jiang Lei. Biophysics:water-repellent legs of water striders[J]. Nature,2004,432(7013):36.
[2] Wang Qing-cheng, Yang Xiao-dong, Yang Zhuo-juan. Research on micro and nano structure and wettability for water strider's leg, abdomen, back and wing[J]. Applied Mechanics & Materials,2013,459:547-550.
[3] 张兴旺. 水黾腿润湿性及水黾运动特性研究[D]. 长春:吉林大学生物与农业工程学院,2014.
Zhang Xing-wang. Research on wettability of leg and motion characteristic of water strider[D]. Changchun:College of Biological and Agricultural Engineering, Jilin University,2014.
[4] 王庆成. 超疏水生物水面超大承载机制及其仿生研究[D]. 长春:长春理工大学机电工程学院,2012.
Wang Qing-cheng. The Mechanism of the super-supporting force of super-hydrophobic biological and its bionic research[D]. Changchun: College of Mechanical and Electric Engineering,Changchun University of Science and Technology,2012.
[5] Bush J W M,Hu D L,Prakash M. The integument of water-walking arthropods: form and function[J]. Advances in Insect Physiology,2007,34(147):117-192.
[6] 田为军,张兴旺,王骥月,等. 水黾多腿并排表面的疏水性能[J]. 高等学校化学学报,2014,35(8):1726-1730.
Tian Wei-jun,Zhang Xing-wang,Wang Ji-yue,et al. Surface properties of hydrophobic side by side water strider legs[J]. Chemical Journal of Chinese Universities,2014,35(8):1726-1730.
[7] Hu D L,Bush J W M. The hydrodynamics of water-walking arthropods[J]. Journal of Fluid Mechanics,2010,644:5-33.
[8] Yabe T,Chinda K,Hiraishi T. Computation of surface tension and contact angle and its application to water strider[J]. Computers & Fluids,2007,36(1):184-190.
[9] Zheng J,Yu K,Zhang J,et al. Modeling of the propulsion hydrodynamics for the water strider locomotion on water surface[J]. Procedia Engineering,2015,126:280-284.
[10] Goodwyn P J P,Wang J,Wang Z,et al. Water striders: the biomechanics of water locomotion and functional morphology of the hydrophobic surface (insecta: hemiptera-heteroptera)[J]. Journal of Bionic Engineering,2008,5(2):121-126.
[11] Takewaki H, Yabe T. The cubic-interpolated pseudo particle (CIP) method: application to nonlinear and multi-dimensional hyperbolic equations[J]. Journal of Computational Physics,1987,70(2):355-372.
[12] Takonobu H,Kodaira K,Takeda H. Water strider's muscle arrangement-based robot[C]∥2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB,Canada,2005:1754-1759.
[13] Suhr S H,Song Y S,Lee S J,et al. Biologically inspired miniature water strider robot[C]∥Robotics: Science and Systems I,Cambridge, Massachusetts,USA,2005:319-326.
[14] Wu L, Yang G, Gui X. Developing strategy based on discussing of the state of the art for a new water strider robot[C]∥2012 Second International Conference on Intelligent System Design and Engineering Application, Sanya,China,2012:674-678.
[15] 何冲. 仿水黾机器人建模及运动特性研究[D]. 天津:河北工业大学机械工程学院,2013.
He Chong. Modeling and kinematics research on water strider robot[D]. Tianjin:School of Mechanical Engineering,Hebei University of Technology,2013.
[16] 王涛. 仿生水黾水面跳跃机器人的研究[D]. 哈尔滨:哈尔滨工业大学机电工程学院, 2015.
Wang Tao. Research on water jumping robot inspired by water strider[D]. Harbin:School of Mechatronics Engineering, Harbin Institute of Technology,2015.
[17] Song Y S, Sitti M. Surface-tension-driven biologically inspired water strider robots: theory and experiments[J]. IEEE Transactions on Robotics,2007,23(3):578-589.
[18] Bai Fan,Wu Jun-tao,Gong Guang-ming,et al. Biomimetic “water strider leg” with highly refined nanogroove structure and remarkable water-repellent performance[J]. ACS Applied Materials & Interfaces,2014,6(18): 16237-16242.
[19] Hu D L, Chan B, Bush J W M. The hydrodynamics of water strider locomotion[J]. Nature,2003,424(6949):663-666.
[20] Yan J H,Zhang X B,Zhao J,et al. A miniature surface tension-driven robot using spatially elliptical moving legs to mimic a water strider's locomotion[J]. Bioinspiration & Biomimetics,2015,10(4):046016.
[21] Zhang X,Yan J,Zhao J,et al. A miniature surface tension-driven robot mimicking the water-surface locomotion of water strider[C]∥2015 IEEE International Conference on Robotics and Automation(ICRA),Seattle,Washington,USA,2015:3172-3177.
[22] Zhang X,Zhao J,Zhu Q,et al. Bioinspired aquatic microrobot capable of walking on water surface like a water strider[J]. ACS Applied Materials & Interfaces,2011,3(7):2630-2636.
[23] Koh J S, Yang E, Jung G P, et al. Biomechanics. Jumping on water: surface tension-dominated jumping of water striders and robotic insects[J]. Science,2015,349(6247):517-521.
[24] Hughes G M. The co-ordination of insect movements. II. The effect of limb amputation and the cutting of commissures in the cockroach (blatta orientalis)[J]. Journal of Experimental Biology,1957,34(3):306.
[25] Wilson D M. Insect walking[J]. Entomology,1966,11(11):103-122.
[26] Delcomyn F. Perturbation of the motor system in freely walking cockroaches. I. Rear leg amputation and the timing of motor activity in leg muscles[J]. Journal of Experimental Biology,1991,156(3):483-502.
[27] Delcomyn F. Perturbation of the motor system in freely walking cockroaches. II. The timing of motor activity in leg muscles after amputation of a middle leg[J]. Journal of Experimental Biology,1991,156(3):503-517.
[28] Delcomyn F. The effect of limb amputation on locomotion in the cockroach periplaneta americana[J]. Journal of Experimental Biology,1971,54(2):453-469.
[29] Zhang Yan,Huang He,Liu Xiang-yang,et al. Kinematics of terrestrial locomotion in mole cricket gryllotalpa orientalis[J]. Journal of Bionic Engineering,2011,8(2):151-157.
[30] Zhang Yan,Zhang Jun-xia,Ren Lu-quan. The terrestrial locomotion of a mole cricket with foreleg amputation[J]. Science China Technological Sciences,2015,58(6):999-1006.
