机器人路径规划技术的现状与发展
2018-05-10徐兵兵郝荣飞
徐兵兵 郝荣飞
摘要
随着智能汽车、智能机器人技术的发展,路径规划越来越重要,国内外大量的学者对路径规划进行了各种研究,并且取得了许多丰硕成果。而随着人类对空间和深海探索脚步的加快,移动机器人的研究和开发越来越受到人们的高度重视,本文以移动机器人为例,探讨了移动机器人路径规划的研究现状和发展趋势。
【关键词】路径规划 专利申请 机器人
1前言
移动机器人路径规划始于20世纪60年代末期,早期的移动机器人路径规划主要是静态环境下,包括栅格的路径规划技术、可视图的路径规划技术、拓扑路径规划技术和混合路径规划技术等,但随着移动机器人应用领域的扩大和工业环境的变化,要求机器人能适应更加复杂和多变的动态工作环境,特别是根据传感器探测到的有限范围内的运动信息进行避障规划,实现动态环境中的运动和避障,出现采用模糊逻辑的路径规划技术、人工势场的路径规划技术、遗传算法的路径规划技术、神经网络、蚁群算法等,基于实时性、安全性、可达性的更高要求,目前移动机器人路径规划技术多在于多传感器、多种路径规划技术的融合。2路径规划专利技术申请情况分析
在IPC分类表中,移动机器人路径规划涉及的分类号有G05Dl/02、GOIC21/20、GOIC21/34、G05Dl/00、B25J9/16等,涉及的关键词包括移动、机器人、路径、路线、线路、规划、robot、mov+、guid+、plan+、path+、rout+、lin+等,截至2017年年底,根据相关分类号和关键词在中英文专利数据库中进行检索,获得以下专利文件数:CNABS文献量为601,SIPOABS文献量为1078。
2.1申请情况分析
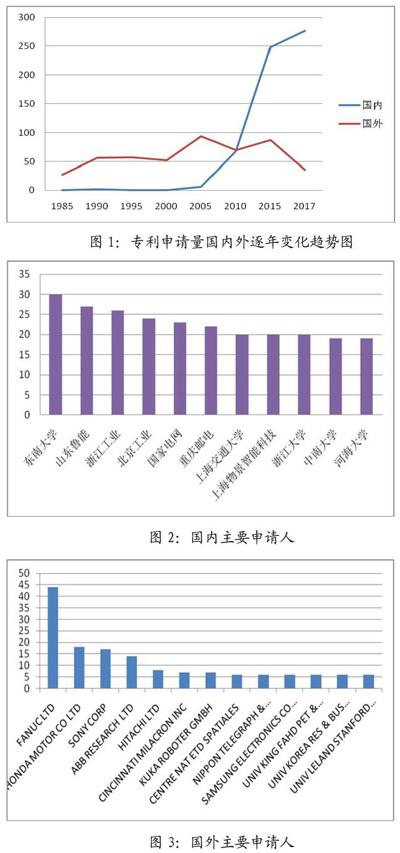
在英文摘要专利数据库中检索发现,国外移动机器人路径规划技术研究较早,1985年之前关于移动机器人的路径规划方法的国外申请量已有27篇,到1990年增加了56篇,1990-2000年申请量较为恒定,2000-2017年申请量呈波浪状变化,而国内到2000年的申请量只有2篇,2005年申请量为8篇,2005-2010年申请量达到76篇,2010年后申请量急剧陡增,到2015年增加到314篇,2015-2017年专利量申请增速有所下降,但申请量仍处于增长的状态。具体情况如图l所示。
2.2主要申请人分析
在英文摘要专利数据库中检索发现,我国移动机器人路径规划技术研究集中于大学院校,各个院校申请数量较为平均,以东南大学、浙江工业大学申请居多,而后由于人工智能技术发展的需求,以国家电网、山东鲁能智能技术有限公司、上海物景智能科技有限公司为代表也相继投入研究,为移动机器人路径规划技术带来了很大的发展与活力,如图2所示。而国外申请人以研究公司居多,主要为日本和美国公司,以日本发那科公司、日本本田株式会社、日本索尼、ABB研究公司等为代表,引领机器人路径规划技术的发展方向。如图3所示。
3结论
总之,移动机器人路径规划技术取得了丰硕的成果,但每一种方法都有其自身的优点和缺点,没有任何一种方法可以应用于所有场合。随着技术的不断发展,多传感器、多路径规划技术的融合的研究将不断深入,路径规划领域的新的智能算法的研究也將不断深化,推动移动机器人在其应用领域中发挥更好的作用。
参考文献
[1]廖绍辉,张连东,机器人路径规划技术的现状与发展趋势[J].机械工程师,2017.
