导向喇叭口剖面半径对AUV回收的影响
2018-05-10赵国良赵春城范华涛姚晨佼
赵国良, 许 可, 赵春城, 范华涛, 姚晨佼
导向喇叭口剖面半径对AUV回收的影响
赵国良, 许 可, 赵春城, 范华涛, 姚晨佼
(中国船舶科学研究中心 深海载人装备国家重点实验室, 江苏 无锡, 214082)
为了对形状尺寸受限的自主式水下航行器(AUV)回收装置导向喇叭口进行合理设计, 分析了弹簧模型和弹簧-阻尼模型2种接触力模型对计算的影响, 研究了喇叭口剖面半径和初始偏移量对回收接触力和回收时间的影响规律, 提出了喇叭口的设计评价方法。在六自由度运动一般表达式的基础上结合接触力模型, 建立回收过程中的AUV运动方程, 设计适用于接触力的时间离散求解程序, 在MATLAB环境下对AUV回收过程进行计算。结果表明, 阻尼在接触模型中的作用有利于回收的顺利进行; 增加喇叭口剖面半径对减小接触力和回收时间均具有积极影响; 综合评价系数可用于综合考量设计指标以确定喇叭口剖面半径。
自主式水下航行器(AUV); 回收装置; 导向喇叭口; 接触力模型
0 引言
随着对海洋的探索和开发逐渐深入, 人们开始在载人潜水器上布放回收自主式水下航行器(autonomous undersea vehicle, AUV), 移动式水下搭载与对接装置保障了AUV在载人潜水器上的搭载、布放与回收, 极大程度地扩展了载人潜水器的水下作业能力, 并为AUV隐蔽任务开展的保障提供了可能性。
目前, AUV搭载与对接装置的形式主要有罩笼式、着陆式、捕获式、机械臂式[1-5]和遥控航行器(remotely operated vehicle, ROV)捕捉式。其中罩笼式应用最为广泛, 其容易改装, 可应用于载人潜水器对AUV的背负式搭载。搭载与对接装置对母艇的阻力、操纵性能等方面的影响不可忽略, 设计中要求在满足其他技术指标的前提下应具有最小的外形尺寸。喇叭口作为外形突出的部分, 应作为重要的设计环节。尺寸较大的喇叭口可在一定程度上降低碰撞载荷, 并且可降低导引精度要求, 但有可能给载体性能带来不可承受的负担, 而过小的喇叭口尺寸虽然对载体的影响较小, 但是导向过程中的载荷过大可能会对AUV造成损伤。为了在设计中找到合适的喇叭口外形尺寸, 有必要对回收过程进行分析。碰撞分析和形状因素对回收指标的影响分析为首要关注问题。
针对AUV回收过程中碰撞分析问题, 国外尚无公开的文献报道。在国内, 史剑光等[6]利用ADAMS软件对圆锥形喇叭口与AUV碰撞过程进行分析, 张医博等[7]对便携式AUV水下对接过程中的碰撞进行分析。两者的研究中均涉及到喇叭口形状特征对碰撞力和回收时间的影响分析, 但研究对象均为圆锥形的喇叭口, 不适合对于外形尺寸限制较为苛刻的移动式搭载方式。文中以圆弧剖面形式的喇叭口为研究对象, 建立回收过程AUV的运动方程和接触碰撞模型, 设计了有效的求解方法; 通过计算得到初始偏移量和剖面圆弧半径对最大接触力和回收时间的影响规律, 为载人潜水器上搭载与对接装置喇叭口设计提供参考; 并提出综合评价系数, 为设计结果的性能综合评价提供参考。
1 AUV运动坐标系及标识


2 AUV运动方程与接触力模型
2.1 AUV运动方程的建立

水下运动六自由度运动方程的一般表达式结合接触力, 得出AUV回收过程的运动方程为纵向力

横向力

垂向力

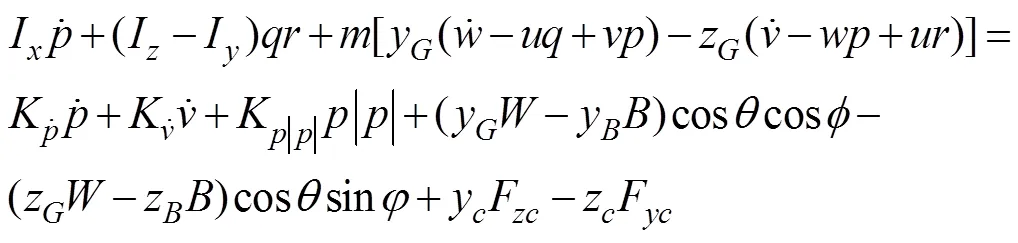
横滚力矩
纵摇力矩

偏航力矩

2.2 接触力模型的建立
接触力一般为AUV回收过程中特有的力, 由回收过程中AUV与导向机构碰撞接触所产生, 其性质为弹力(作用效果为碰撞力)和摩擦力, 具有作用时间短、变化梯度大、瞬时峰值高和作用位置不确定的特点。

2.2.1 碰撞力
AUV与导向机构的碰撞可以看作是船舶碰撞问题的一个分支。力学机理分为外部机理和内部机理。外部机理主要描述刚体运动以及耗散于结构损伤变形的碰撞能量, 是文章关注的重点。
弹簧阻尼模型作为一种广泛应用的碰撞力模型, 假定变形发生在接触区的邻域, 认为接触力是一种特殊的力, 将碰撞过程中碰撞现象处理为连续的动力学问题, 将接触力等效成一个弹簧力和阻尼力模型。弹簧阻尼模型的广义Hertz公式[10-12]具有如下形式


阻尼系数采用STEP函数表示, 表达式为

2.2.2 摩擦力
AUV与导向机构的相对运动不同于一般的正碰, 除碰撞以外的另一典型运动为两者之间的相对滑动, 根据Mohr-Coulomb摩擦定律[11], 得

2.2.3 接触力方向
3 求解方法



4 求解分析
4.1 计算模型描述
通过上述运动及受力分析在MATLAB环境下对AUV的导向过程进行求解分析, 所采用的模型形式如图6所示。
采用文献[9]中的AUV模型, 动系固定于AUV其原点位于AUV的几何中心, 为计算方便将AUV艏部近似为半球型。回收导向机构固定于定系, 为全对称回转形式, 前端喇叭口纵剖面为圆弧形状, 与后端圆管剖面相切。定义喇叭口与圆管连接处中心点为定系原点。





4.2 弹簧模型与弹簧-阻尼模型对比分析
阻尼模型反应碰撞期间的能量耗散, 与碰撞物体之间材料、结构形式相关, 研究阻尼模型作用对回收机构设计具有指导性意义。
以喇叭口剖面圆弧半径=750 mm(偏移150 mm)回收为例, 2种模型下的AUV艏部运动轨迹以及回收过程AUV位置姿态情况分别如图8和图9所示, 速度变化曲线如图10所示。
由以上结果可以得到, 该算法下AUV在导向机构弹性接触力作用下其能量转换流程为动能—弹性势能—动能。假设碰撞作用时间很短(即忽略碰撞过程中水动力和推力的影响), 由于没有阻尼对碰撞能量的耗散, AUV在接触位置处的法向动能分量在很短的时间内转化为转艏动能以及横移动能, 使AUV获得较高的转艏及横向速度, 这种相互作用形式在后续接触位置重复出现, 出现图8所示的现象。随偏移量的增加, 接触角逐渐增大, 首次接触造成的转艏及横移速度随之增大, 当达到一定程度时(如上述结果中在=500 mm, 偏移量250 mm以及=750 mm, 偏移量300 mm)AUV被弹出回收机构, 无法进行回收。

表1 模型及运动参数

表2 力学模型参数
由于阻尼的存在, AUV碰撞位置处法向动能分量的一部分将会在碰撞接触过程中耗散掉, 相比无阻尼计算模型, 接触分离之后所具有的转艏及横向速度值均较小, 造成的结果是后续碰撞的接触角、接触位置法向动能分量均较小, 经过少数几次碰撞接触之后, 艏向速度及横向速度均达到较低值, 可相对平滑的进入导向机构内部。相比无阻尼条件的计算结果, 阻尼作用可实现存在更大偏移情况下回收。
4.3 喇叭口剖面半径
喇叭口的设计受多方面因素制约, 从回收成功率角度, 越大的开口可提供越大范围的导向, 有利于提高回收成功率, 但是从载人潜水器总体性能方面来讲, 更大的喇叭口会增加更多的航行阻力以及更多的布置空间, 对水下移动式搭载平台造成不必要的负担。另外AUV自身的操控性能、回收环境等因素共同作用的统计学数据以及艏部形状及形式、抗冲击性能等同样为喇叭口设计中必须考虑的因素。
喇叭口与AUV的碰撞受力情况分析为设计中的关键。从上述碰撞过程中能量转换的分析可知, 减小碰撞角度有利于减小碰撞力的大小, 如图11所示, 虽然具有直线剖面的喇叭口在整个开口范围内碰撞角保持不变且始终为较小值, 但是与弧形剖面相比, 达到相同开口大小需要更大纵向长度。文中以圆弧形剖面的喇叭口为研究对象对回收过程中的导向情况进行分析。
以圆弧型剖面导向罩为对象, 分别对剖面半径为0.5~1.5 m, AUV初始偏移量为0.1~0.45 m进行计算。
定义回收时间t为AUV艏部中心点从对接口以外1.2 m至以内2.5 m所用的时间。将回收过程中产生的最大接触力和回收时间t作为研究对象, 3 kn回收速度下,和t随导向罩剖面圆弧半径和初始中心偏移量的变化趋势如图12和图13所示。
计算结果表现出来的趋势为最大接触力和回收时间t均随着初始中心偏移量的增加而增加, 这一变化趋势随着导向罩喇叭口剖面圆弧半径的减小变的愈发强烈。从AUV与导向罩接触情况下的几何关系图14可以得到, 接触点上接触角随着中心偏移距离的减小而减小, 同时随着剖面圆弧半径的减小而增加。如图15所示, 初始碰撞接触角度的不同所产生的作用效果差异表现在接触点的速度分量和受力方向, 在接触点处AUV的初始航速的法向分量sin与接触角正相关, 较大的接触角对应AUV在接触法向具有较高的动能分量, 而接触力在定系下的横向分量cos与接触角负相关, 该分力可使AUV转艏起到动能转移的作用, 较大的接触角会削弱这一作用效果使AUV法向动能更多的由接触作用吸收, 从而产生较高的接触力和较长的回收时间。
结合图14可以发现, 增大喇叭口剖面圆弧半径可在整个喇叭口范围内降低接触角数值水平, 因而减小接触角对减小接触力和接触时间均有积极的影响。
4.4 综合评价系数
尽管上一节的计算结果显示增大喇叭口剖面圆弧半径具有积极的意义, 但是从设计角度而言, 该半径不可过大, 需根据设计的考量侧重点进行综合评价。
综合评价系数可理解为类似评价函数[14]的一种指标。在设计模型中应针对需要综合考量的主要指标定义量化的评判标准, 根据数值计算结果计算该评判标准的值作为评判依据。这样的评判标准即综合评价系数。准确的评判模型建立本身即是系统且复杂的数学问题, 但并不作为研究的重点。下文以综合考虑回收力、回收时间和导向罩轴向长度为例对综合评价系数进行说明。
5 结束语
文中利用所建立的AUV回收过程中的运动模型, 在MATLAB环境下对AUV回收过程进行了计算, 分析了喇叭口对AUV回收的影响。分析结果表明, 接触力模型中的阻尼作用有利于AUV的回收, 喇叭口剖面圆弧半径的增加有利于减小最大接触力和回收时间, 综合评价系数可用于对设计指标的综合考量, 以确定喇叭口剖面半径。然而实际情况下的AUV对接回收过程要复杂的多, 后续研究涉及如下几点: 研究碰撞作用对水动力参数的影响, 建立更准确的AUV回收运动方程; 分析回收机构结构形式以及材料等对接触力的影响, 以获得更准确的接触力模型; 探索更准确的设计评判方法, 以得到最优设计。
[1] Allen B, Austin T, Forrester N, et al. Autonomous Docking Demonstrations with Enhanced REMUS Technology[C]//Oceans 2006, USA: IEEE, 2006: 1-6.
[2] Mcewen R S, Hobson B W, Mcbride L, et al. Docking Control System for a 54-cm-Diameter(21-in) AUV[J]. IEEE Journal of Oceanic Engineering, 2009, 33(4): 550-562.
[3] Kawasaki T, Fukasawa T, Noguchi T, et al. Development of AUV Marine Bird with Underwater Docking and Recharging System[C]//The International Workshop on Scientific Use of Submarine Cables and Related Technologies. USA: IEEE, 2003: 166-170.
[4] Singh H, Bellingham J G, Hover F, et al. Docking for an Autonomous Ocean Sampling Network[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 498-514.
[5] 曹和云, 倪先胜, 何利勇, 等. 国外潜载UUV布放与回收技术研究综述[J]. 中国造船, 2014, 55(2): 200-208.
Cao He-yun, Ni Xian-sheng, He Li-yong, et al. Review on UUV Launch and Recovery Technology from Submarine[J]. Shipbuilding of China, 2014, 55(2): 200-208.
[6] 史剑光, 李德骏, 杨灿军, 等. 水下自主机器人接驳碰撞过程分析[J]. 浙江大学学报(工学版), 2015, 49(3): 497-504.
Shi Jian-guang, Li De-jun, Yang Can-jun, et al. Impact Analysis during Docking Process of Autonomous Underwater Vehicle[J]. Journal of Zhejiang University(Engi- neering Science), 2015, 49(3): 497-504.
[7] 张医博, 唐元贵, 要振江. 便携式AUV水下对接过程中的碰撞分析与罩式对接平台优化设计[J]. 海洋技术学报, 2017, 36(5): 27-31.
Zhang Yi-bo, Tang Yuan-gui, Yao Zhen-jiang. The Collision Analysis of Portable AUV Underwater Docking and Optimal Design of the Docking Platform[J]. Journal of Ocean Technology, 2017, 36(5): 27-31.
[8] 施生达. 潜艇操纵性[M]. 北京: 国防工业出版社, 1995.
[9] McEwen R S, Streitlien K. Modeling and Control of A variable-length AUV[C/CD]//12th International Symposium on Unmanned Untethered Submersible Technology. Durham: IEEE, 2001.
[10] Popov V L. Contact Mechanics and Friction: Physical Principles and Applications[J]. Springer Berlin Heidelberg, 2010, 50(1): 17-30.
[11] Lankarani H M, Nikravesh P E. A Contact Force Model With Hysteresis Damping for Impact Analysis of Multibody Systems[J]. Journal of Mechanical Design, 1990, 112(3): 369-376.
[12] 周志才, 吴新跃, 张文群, 等. 基于弹簧阻尼模型的碰撞动力学研究[J]. 湖北工业大学学报, 2012, 27(1): 125-128.
Zhou Zhi-cai, Wu Xin-yue, Zhang Wen-qun, et al. Study on Contact Dynamics Based Spring-damper Model[J]. Journal of Hubei University of Technology, 2012, 27(1): 125-128.
[13] 羊云石, 顾海东. AUV水下对接技术发展现状[J]. 声学与电子工程, 2013(2): 43-46.
[14] 刘伟, 杨玉英. 基于FEA的板料成形工艺优化及评价函数研究[J]. 材料科学与工艺, 2006, 14(2): 159-161.
Liu Wei, Yang Yu-ying. Study on Process Optimization and Objective Functions of Sheet Metal Forming Based on FEA [J]. Materials Science and Technology, 2006, 14(2): 159-161.
(责任编辑: 陈 曦)
Influence of Profile Radius of Guiding Cone on Recovery of AUV
ZHAO Guo-liang, XU Ke, ZHAO Chun-cheng, FAN Hua-tao, YAO Chen-jiao
(State Key Laboratory of Deep-sea Manned Vehicles, China Ship Scientific Research Center, Wuxi 214082, China)
Abstract: To reasonably design the recovery device’s guiding cone, whose shape and size are restricted for an autonomous undersea vehicle(AUV), the influences of the “elastic” and “elastic-damping” contact force models on the calculation are analyzed, and the influence of the guiding cone’s profile radius and initial offset on the recovery contact force and the recovery time are investigated, hence an evaluation method of the design of guiding cone is put forward. The general expression ofsix-degree-of-freedom motion and the contact force model are employed to establish the AUV motion equations in the recovery process, and a time discrete solution program that adapts to the contact force is designed to calculate the AUV recovery process on the software MATLAB. The results show that: 1) the damping in the contact model is conducive to the recovery process; 2) the increasein the profile radius has positive effect on reducing both contact force and recovery time, and 3) The comprehensive evaluation coefficient can be applied to comprehensively evaluating the design specification to determine the profileradius.
autonomous undersea vehicle(AUV); recovery device; guiding cone; contact force model
赵国良(1988-), 男, 硕士, 助理工程师, 主要研究方向为AUV水下搭载与对接技术.
P754.3; TP242.6
A
2096-3920(2018)02-0166-08
赵国良, 许可, 赵春城, 等. 导向喇叭口剖面半径对AUV回收的影响[J]. 水下无人系统学报, 2018, 26(2): 166-173.
2017-12-13;
2018-02-01.
10.11993/j.issn.2096-3920.2018.02.011
