全自动无人驾驶车辆基地总平面布置方案探讨
2018-05-05李致勇
李致勇
(中铁工程设计院有限公司,北京 100039)
1 概论
随着我国城市轨道交通的不断创新与进步,全自动无人驾驶系统应运而生,成为轨道交通领域发展的新方向。根据城市的用地及轨道交通线网情况,需要设置相应的车辆段及停车场。车辆段(停车场)是保证地下铁路工程正常运营的后勤基地,其总平面布置需求随全自动无人驾驶系统的出现变得越来越高,稍有不周,将直接影响车辆段的运营效率。所以,如何合理利用有限的土地资源,满足工艺需求,并完成总平面设计布局,成为轨道交通领域的重要和前沿问题。
2 案例分析
2.1 阎村北停车场工程概况
以北京地铁燕房线车辆基地——阎村北停车场为例,对其总平面布置方案进行研究和分析。燕房线是国内首条自主研发的无人驾驶系统运行的地铁线路,其起点为燕化产业基地内的洪寺站,终点为车辆段站。线路全长16.7 km(含房山线西延伸段2.2 km),均为高架线,共设8座车站。在车辆段站北侧设阎村北停车场。阎村北停车场场址位于既有房山线阎村车辆段以北、京石高速以西、六环路以东、东沿村新村以南所围的狭长地块,东西长约990 m,南北宽160 m,地势较为平缓,面积约14.3 hm2。阎村北停车场场址见图1.
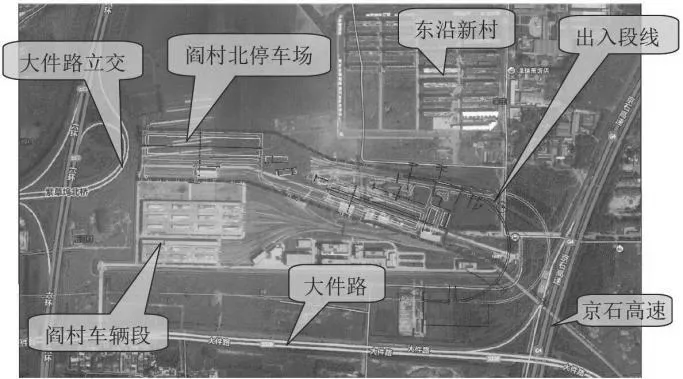
图1 阎村北停车场位置图
2.2 阎村北停车场总平面布置方案分析
受用地条件的限制,本方案采用“倒装”方式布置,将联合检修库及停车列检库分别布置于场地的东西两侧,洗车库与停车列检库平行并列布置于场地西侧,镟轮库单独布置在停车列检库南侧,联合检修库相对于出入场线和停车列检库呈现倒装布置形式,位于场地东侧;物资库布置于场地东南角靠近场区出入口的位置,以方便运输,停车场其他区域还布置有工程车库、工务料棚、易燃品库等生产类设施。
综合楼由办公楼、信号楼、综合维修中心、司乘公寓、食堂等组成,食堂单独设置并通过连廊与综合楼相接,设在场地东侧、咽喉区南侧。锅炉房及水泵房、牵引变电站布置在生活区西侧。污水处理站、蓄水池布置于办公生活区域东侧。阎村北停车场总平面布置图见图2.

图2 阎村北停车场总平面布置图

图3 阎村北停车场全自动无人驾驶分区示意图
其中,洗车作业、停车列检作业为无人区作业,其他区域为人工作业区,因此本方案将洗车库与停车列检库布置于全自动无人驾驶区域,其他库线布置于人工驾驶区域,转换区域布置在咽喉区靠近生活区位置,方便司机上下车作业。具体分区情况如图3所示。
阎村北停车场的设计理念结合了实际用地情况及全自动无人驾驶的要求,司机可通过转换区作业实现车辆有人无人驾驶的转换。该停车场的方案设计为国内其他全自动无人驾驶车辆基地的总平面设计提供了依据和参考。
2.3 歇甲村车辆段工程概况
北京地铁17号线位于北京市东部地区,线路南起通州区,环渤海总部基地——亦庄新城站前区,北终昌平区未来科技城地区。线路串联了通州、东城、朝阳、昌平4个行政区,总长49.97 km。新建歇甲村车辆段及次渠南停车场各一座,歇甲村车辆段位于昌平区天通苑东侧的歇甲村地区,停车场位于通州区南部的台湖地区。歇甲村车辆段承担17号线全线配属列车的架修,部分配属列车的月检、临修、运用、清洗、镟轮任务。车辆段选址位于歇甲庄规划一路南侧,避开占用北侧的非建设用地,场地西邻北苑东路,东邻滨河路,南侧为歇甲村。选址现状地块主要是歇甲村村民住宅及少量乡镇企业房屋,其余为农田场地,中间有一排220 kV的高压线穿过,场地东侧有一排500 kV的高压线。歇甲村车辆段选址地块现状卫星图见图4.

图4 歇甲村车辆段选址地块现状卫星图
2.4 歇甲村车辆段总平面布置方案分析
歇甲村车辆段采用全自动无人驾驶,并进行上盖物业开发。在满足车辆段功能的前提下,结合全自动驾驶,根据用地范围及地块与周边现状、规划道路的位置关系,进行总平面布置。
运用库(含洗车库、停车列检库、镟轮库)与联合检修库采用“顺装”方式并列布置在车辆段地块的东侧。试车线布置在联合检修库的北侧。工程车库及工务料棚布置在联合检修库的西侧,物资总库布置在工程车库及工务料棚的西侧。综合办公楼、司乘公寓、牵引降压混合变电所、消防泵房等组成厂前区,布置在咽喉区与试车线之间。在出入段线U型槽的南侧布置了洗车的牵出线,洗车库的牵出线南侧布置了带有卸车线的卸车场地(兼焊轨场地)。在八字线的U型槽北侧布置了全自动、非全自动转换的牵出线,在牵出线北侧布置了特种车的维保基地。歇甲村车辆段总平面布置图见图5.
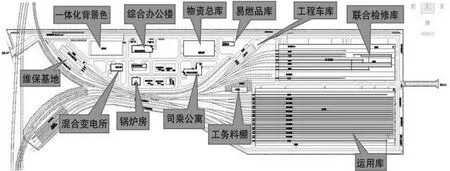
图5 歇甲村车辆段总平面布置图
本方案总平面布局划分为全自动运行区和非全自动运行区。停车列检库和洗车库布置在全自动运行区,其余布置在非全自动运行区,全自动运行区域设铁路栅栏实现区域的物理隔离。在八字线U型槽的北侧设置了全自动、非全自动转换的转换区域,靠近厂前生活区,方便司机上下车作业。歇甲村车辆段全自动无人驾驶分区示意图见图6.歇甲村车辆段的设计同样需要全自动无人驾驶,其检修规模及占地面积都比阎村北停车场大,并采用并列式总平面布置方式,与阎村北停车场“倒装”式总平面布置形成鲜明的对比。

图6 歇甲村车辆段全自动无人驾驶分区示意图
3 结论
本文通过阎村北停车场与歇甲村车辆段设计方案的对比分析,分别介绍了车辆基地“倒装式”平面布局和“并列式”平面布局在全自动无人驾驶前提下的功能分区情况,可以得出以下结论:①要实现车辆基地全自动无人驾驶的功能,其总平面设计就需要有明确的功能分区,即全自动区域(无人驾驶区域)和人工驾驶区域(非全自动区域)。②咽喉区线路布置需要设计单独的转换轨区域。③车辆基地内各部分功能分布明确,工艺流程顺畅,相互干扰较小。生活区房屋集中布置,合理利用土地。④无人驾驶区域需设置隔离设施,实现区域的物理隔离。⑤厂前生活区靠近人工驾驶区域并尽量远离全自动无人驾驶区域。
参考文献:
[1]李桂桂,冯太群.地铁车辆段站场设计相关问题研究[J].铁道标准设计,2012(3):102-104.
[2]北京城建设计研究总院有限责任公司,中国地铁工程咨询有限责任公司.GB 50157—2013地铁设计规范[S].北京:中国建筑工业出版社,2013.
[3]张雄.论地铁车辆段总平面设计的特点及其优化[J].铁道工程学报,1999(3):91-93.
[4]兰淑桂.地铁车辆段站场设计有关问题的解决方法[J].铁道工程学报,2010(6):119-122.
