空间站舱内飞行器总体设计及试验方案研究
2018-04-26李九人张海联张高飞曹永奎
师 帅,李九人,张海联,张高飞,曹永奎
(1.清华大学精密仪器系,北京100084;2.中国航天员科研训练中心,北京100094)
1 引言
舱内飞行器是活动在空间站等大型航天器内部,具有相对完整的分系统,可完成特定任务的微纳航天器。由于舱内飞行环境安全稳定,舱内飞行器可利用商用器件与前沿技术设计,具有成本低、风险小、持续时间长、可重复使用等优点[1-3]。又因其平台处于真实微重力环境,可以高度逼真地模拟太空飞行环境,故被认为是一种验证未来航天任务关键技术的理想手段[4]:通过飞行器算法的更新与重复使用,可试验多种算法从而提高技术成熟度和可靠性[5];还可在航天员的配合下开展较为复杂的验证试验,并方便地进行释放、回收与过程监测[6]。2006年以来,美国将多颗麻省理工大学研制的同步位置保持、连通与再定向试验卫星SPHERES(Synchronized Position Hold Engage Reorient Experimental Satellites)送入国际空间站,在空间站舱内进行了多次合作/非合作目标自主交会对接、编队飞行试验,对相关控制算法和硬件平台进行了大量的演示与验证,取得了众多理论和工程实践成果[7]。
舱内飞行器平台还可改造为空间站内部智能机器人,提供环境巡视、监测和预警等服务。如2011 ~2013 年,SPHERES 又开展了功能扩展[8]、智能机器人升级[9]以及空间微流体实验[10]等任务,取得了良好效果。而同为美国研发的舱内飞行器 PSA(Personal Satellite Assistant)则专注于舱内监测与辅助。PSA由NASA Ames研究中心提出并研制,以提高人员工作效率和通过健康检测管理系统降低任务风险为设计目标,通过集成各种环境和设备的传感器以及音频/视频人机接口设备,突破自适应控制系统、人机交互等关键技术,使之具备接受远程指令、手势识别的能力,进而执行辅助任务[2,11]。 PSA 的研究后来演化为HET2(Human Exploration Telerobotics 2)项目中的Astrobee舱内飞行器,后者是一种真正意义上的空间站内智能机器人,被设计来用于执行各种各样的任务,包括搭载外部载荷,作为移动传感器(如成像或空气质量测量),可在空间站内自主移动,进行自由飞行机器人的实验等,计划于NASA 2018财年搭载进入国际空间站[12-14]。
可以看出,美国利用SPHERES卫星,在军事和民用领域都取得了可观的效益,而Astrobee更是面向未来长远规划的结果。相比而言,国内面向舱内飞行器的研究和设计还处于萌芽阶段。舱内飞行器一般属于微纳卫星的范畴,而国内微纳卫星的应用自陈芳允1992年提出对地观测7颗星网络以来,已取得了长足进步。中国空间技术研究院,清华大学、浙江大学、国防科技大学等高校[15],以及中科院[16]乃至民营企业[17],都相继发射了微纳卫星并取得了成功。目前,在基于高性能COTS器件和新型微系统部/组件的纳皮型卫星研制方面,国内已经具备较好的基础。随着我国即将建成空间站,研制并试验舱内飞行器的条件趋于成熟,需求日益迫切。针对这一问题,本文在分析舱内飞行器研制需求的基础上,进行飞行器总体方案设计,明确关键指标要求并提出系统实现方案;在此基础上,对飞行器各系统进行详细设计与校核,并对舱内飞行器的在轨试验和地面实验方案进行分析。
2 飞行器总体方案
2.1 需求分析
2.1.1 任务需求
已经实现在轨飞行的SPHERES主要的任务为算法验证与基于功能扩展的在轨应用,分析其指标可发现,SPHERES主要存在姿态测量精度偏低、不具备主动探测的能力两项不足。SPHERES的姿态角测量误差范围为±1°,这意味着SPHERES的姿态角控制误差范围比±1°更大,因而不利于高精度算法的验证。此外,SPHERES的敏感器为超声波敏感器,主要用于确定飞行器本身的位置和姿态,仅与舱段内的超声波信标进行配合使用,不具备相对测量和舱内环境监测的能力。而近期计划送入空间站的Astrobee主要功能是在轨服务,对测量和控制的要求较低。考虑到充分满足各种任务的需求,我国空间站舱内飞行器的主要任务是为未来任务关键技术及硬件平台提供验证手段,并通过升级改造,成为空间站内部飞行的智能机器人,提供环境巡视、监测和预警等服务,即兼具SPHERES和Astrobee的功能。基于这一需求,并借鉴国外已开展工作中存在的不足进行改进,设定空间站舱内飞行器需实现的任务包括:
1)失重条件下的空间站舱内自主导航与控制。在6-DOF自由飞行中,实现任意时刻飞行器相对于舱段位姿自主估计、保持与机动的能力。
2)实现星间通讯、星站通讯与人机交互。实现多颗飞行器之间的实时无线通讯,可交换导航信息、控制信息与任务信息;飞行器与安装于空间站内的控制站实现无线通讯,飞行器可即时回传自身状态,控制站可发送控制与测试指令。飞行器提供人机界面,方便航天员进行操作和控制。
3)一定时长的连续飞行与系统运行。根据算法验证或功能扩展的试验要求,进行足够时长连续、安全飞行,并运行星上软件,完成既定动作。
4)为飞行器编队、交会等算法提供验证平台。为研究人员开展在轨算法测试提供运行环境,提供位置、姿态敏感器与执行器接口,实现飞行器间信息通讯和相对状态测量。具备连续试验运行的能力,以及在线评估算法性能的能力。
5)运行安全、方便维修、可重复使用。飞行速度适宜,外壳具有安全设计,推进剂无毒无污染。可通过充电多次反复使用,飞行器的硬件便于维护和更换,可实现软件重新上载。
6)系统升级及功能扩展。采用模块化设计,关键部件实现即插即用。采用通用化、统一设计的机械接口、电气接口和通讯接口,可通过加装部件及软件升级实现功能扩展。
2.1.2 总体技术指标
1)考虑目前系统集成的技术水平,飞行器包络尺寸应不大于200 mm×200 mm×200 mm,体积不大于5×103cm3,质量不大于5 kg。设计应符合模块化要求,模块间机电接口设计统一、规范,关键部件可方便更换,结构及功能可扩展。
2)综合电子系统应能同时处理3路百万像素相机图像以及刷新率20 Hz的微惯性测量单元(MIMU)测量值,同时完成正常的星务管理、指令处理与数据记录。因此要求存储空间不小于1 GB,处理器运算速度500 MHz以上。飞行器间以及飞行器与控制台间实现无线通讯,主要传输简短指令及关键数据,传输速率不小于500 kbps。
3)飞行器应实现高精度自主导航,结合对舱内环境尺度下视觉系统精度水平的分析,位置测量精度应优于5 mm,姿态角测量精度应优于0.3°,与 MIMU融合测量位姿的刷新率优于10 Hz。位置控制精度应达到2 cm,姿态控制精度1°,姿态稳定度0.1°/s。 推进剂无毒、无污染。
4)电源系统应实现在舱内方便、随时充电,单次充电后飞行器待机时间不少于5 h,连续飞行试验时间不少于2 h。电源功率15 W。
2.2 飞行器总体方案
根据功能要求,采用模块化设计,结合一体化、小型化理念提高平台功能密度比,飞行器设计为由5个主要分系统组成,分别为电源、综合电子、通信、GNC和结构,如图1所示。
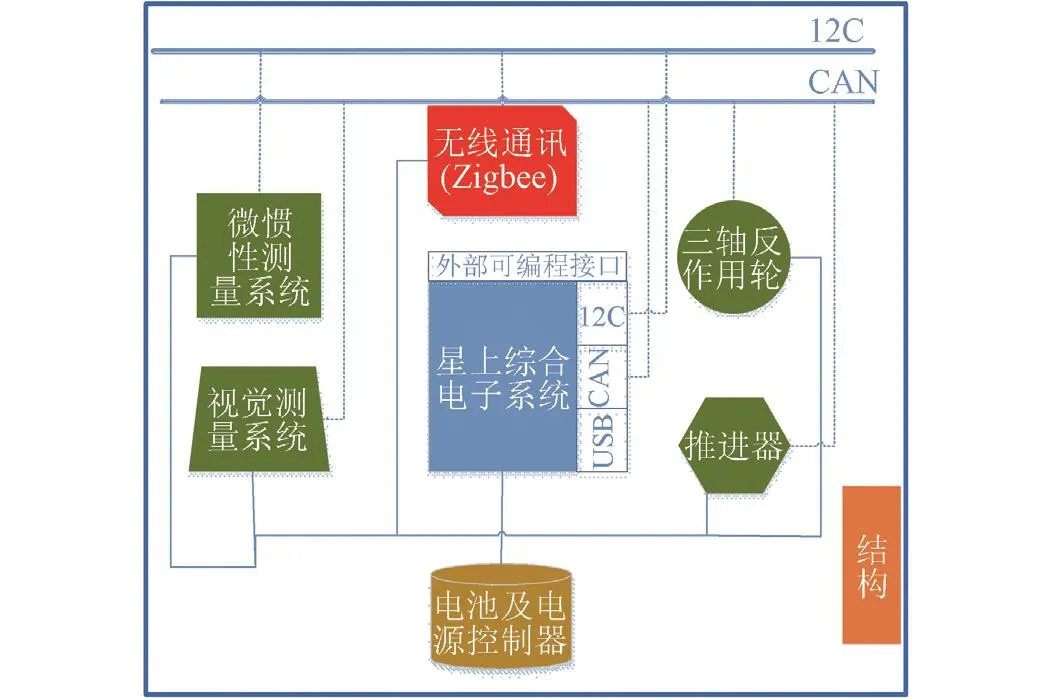
图1 舱内飞行器模块组成Fig.1 Module composition of the Inboard Nano Satellite
1)电源管理和供电模块:由可充电锂电池组和电源管理电子系统构成,可充电锂电池留有外部充电接口,方便进行充电。电源管理模块实现电压变换和功率分配。
2)综合电子系统模块:采用高性能COTS器件,以提高系统性能。采用总线形式,方便系统升级和功能扩展。执行平台任务管理、系统控制以及数据采集、存储、处理、计算等任务。系统有在线编程接口,可以通过软件更新,实现系统功能重构,有能与CAN、I2C和USB等总线标准接口,可实现与外部控制器和部件间的即插即用链接。
3)通信模块:建立舱内飞行器之间、飞行器与舱内系统的数据链路,传输测量数据与控制指令,采用 Zigbee通讯协议,传输速率达1 Mbit/s(IEEE 802.15.2)。
4)GNC模块:姿态测量采用机器视觉加微惯性测量组合方式,使用商用微型化相机和高性能商用MIMU为基本组件,以保证姿态和位置测量精度,同时使飞行器有主动探测的能力。敏感器测量数据通过数据总线传递给星上计算机,由星上计算机实现姿态和位置滤波。控制执行器包括姿态控制和位置控制两种。姿态控制执行器采用三轴动量装置,位置控制采用安全性高且无毒无污染的CO2喷气推进器。
5)结构模块:遵循小型化、轻量化原则,采用球体结构设计以提高飞行器结构空间有效利用率和可扩展性。各子系统分别集成至模块盒内,方便更换和重组。
考虑系统可扩展性,电源管理和供电模块以及计算机模块采用可替换扩展接口,电池、电源管理主板、计算机主板设计为插拔式部件,便于舱内更换;计算机主板留有扩展插口,插入兼容型号的相关器件可以对计算机模块数据处理能力、存储能力进行扩展升级。GNC模块的传感器、执行器采用可替换的机械接口,实现舱内简单操作的插拔替换。实验数据处理存储模块设计为可替换模块,可以根据不同的实验内容选择合适的模块进行替换,如图2所示。
3 系统设计
3.1 结构
结构采用带交会对接机构的模块化设计。
1)总体结构
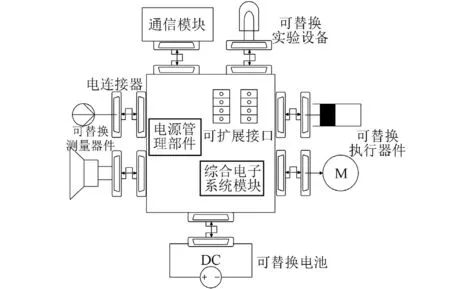
图2 舱内飞行器系统设计示意图Fig.2 Schematic diagram of the INS system design
总体结构利用3D绘图工具实现建模与分析。经多方案对比,飞行器外观设计为球形,具有空间利用率高和飞行安全的优势。各系统与组件包裹在多面体板筋框架结构中,人机界面、对接机构及姿态敏感器、执行器等部件置于外壳表面。主体结构如图3(b)所示,外包络尺寸为0.2 m×0.2 m×0.2 m。经强度校核采用2 mm厚铝合金框架式结构承载;经3D模型分析估算,飞行器总质量约5 kg。
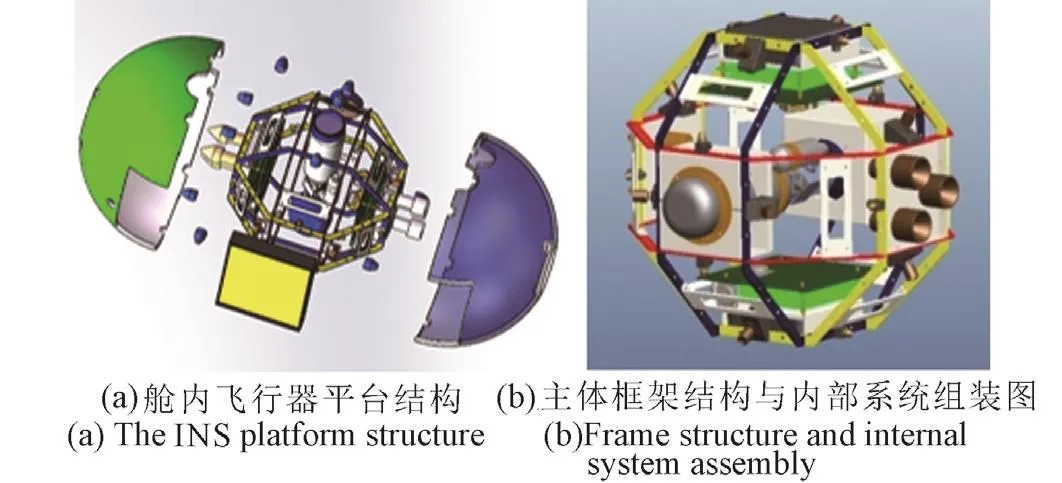
图3 舱内飞行器结构示意Fig.3 structure of the INS
2)对接机构
舱内飞行器采用电磁式对接机构,实现两个卫星之间的吸附、定位与锁紧,因其相比于大型航天器的机械式对接机构,具有体积小、质量轻、设计制造简单的优势,故特别适用于微纳航天器的对接。电磁原理对接机构在英国萨里空间中心最近研制的纳型卫星中已经得到应用[9]。舱内飞行器交会对接过程如图4所示,将成等边三角形布置的3只对接装置,正、反两部分分别安装在卫星的一组对面上,确保吸附可靠的同时,也避免了相对转动。采用圆锥形设计(如图5)以降低位姿控制难度,提高可靠性。
3.2 电源系统
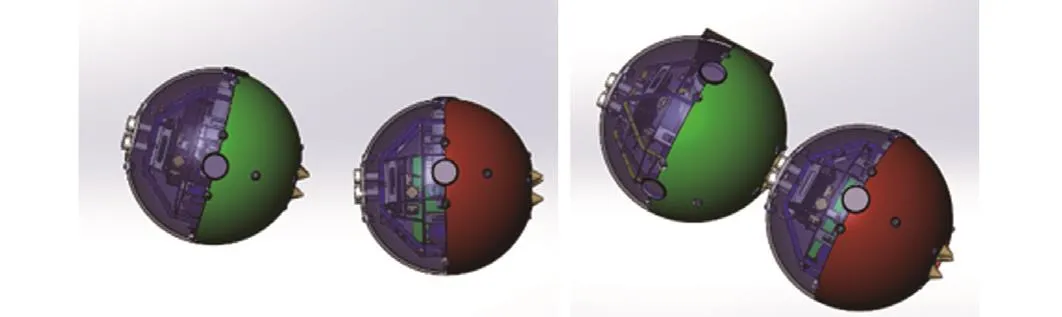
图4 舱内飞行器交会对接示意图Fig.4 INS rendezvous and docking
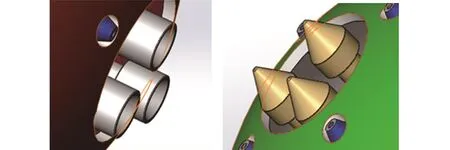
图5 舱内飞行器对接机构方案设计图Fig.5 Design of the INS docking mechanism
电源系统为飞行器的各个部/组件提供充电接口、充放电管理与电流电压保护。通过有线方式从空间站获得电能后分为两路:一路电源通过电源调节模块(PCM)分配至各分系统,在分系统转换为二次电源使用;另一路供给综合电子系统。设计结果如图6,主板为插拔式可替换部件,主要由电源输入电路、电池组、电池充放电管理模块(BCR)、PCM 组成:
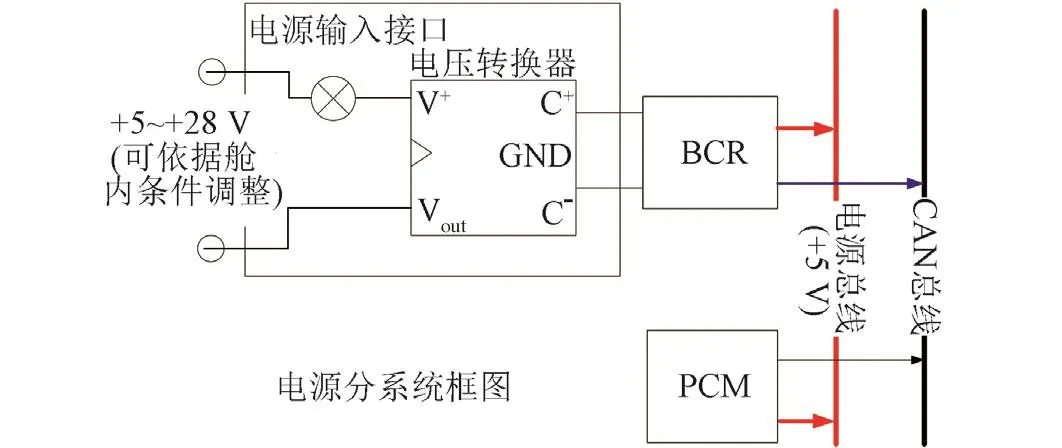
图6 电源分系统框图Fig.6 Block diagram of power system
电源输入电路:电压转换器选用同步开关电池充电控制器,将外部电源转为9~12.6 V,为锂电池组充电。
电池组:选用3节26650锂电池,紧凑质轻、安全性高,可满足15 W的总体功率需求。电池组最多存储44 W·H电能,而飞行器最大功耗8.96 W,因此可满足2 h连续飞行的供电需求。
BCR:结构设计如图7,以MCU为核心器件,具有充放电管理功能。单节电池串接1Wire芯片,实现电流、电压、温度检测。
PCM:结构设计如图8所示,由控制模块、DC/DC模块、单片机组成。控制模块内嵌1Wire芯片,DC/DC模块植入到各分系统,将5 V电源转换为有效载荷所需的供电,由MCU负责通讯和控制。4路供电分别供给动量轮、相机和微惯性测量单元、推进系统、外部扩展口。
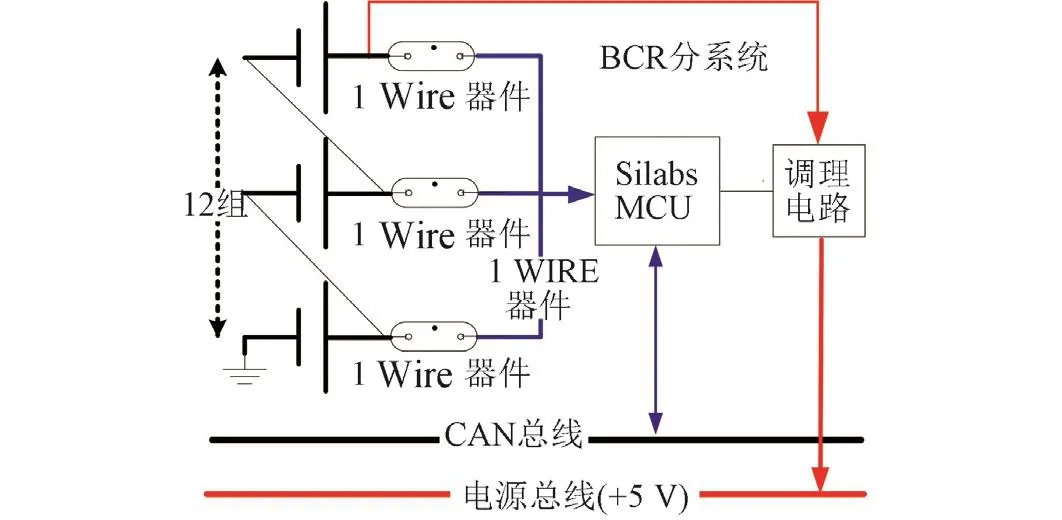
图7 BCR框图Fig.7 Block diagram of BCR module

图8 PCM框图Fig.8 Block diagram of PCM module
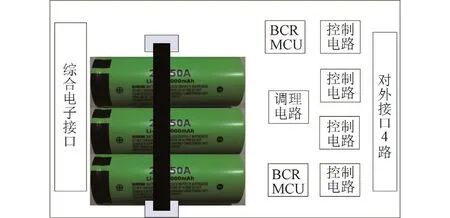
图9 电源系统底板安装接口示意图Fig.9 Floor installation interface for power supply system
3.3 综合电子系统
综合电子系统是星上信息存储、处理、运算的平台,负责飞行器的星务管理。结和舱内飞行器的飞行环境特点和功能需求,综合电子系统须实现以下功能,以满足快速准确获取、存储、处理信息、实现控制以及系统扩展的需求:1)作为信息处理核心分系统,实现内部通讯接口,获取分系统信息;2)实现信息存储与处理,运行位姿控制算法,输出控制信号;3)保留编程接口,实现扩展外接设备。
综合电子控制板采用插拔式可替换部件,以ARM9作为核心处理器芯片,4 Gbits存储器,以满足飞行器对于算法验证、在轨服务的高运算能力需求。同时,实现I2C和CAN总线、2路UART,一路编程用USB和一路对外扩展USB接口,满足系统集成的通讯需求并支持多种主流扩展接口,使飞行器具有多项功能扩展的潜能。
根据飞行器功能需求与数据流分析,综合电子系统处理的星上数据分为以下几类:
1)综合电子系统与PCM、BCR模块间,通过CAN总线实现电源开关控制,和电流、电池状态信息获取;
2)综合电子系统与GNC系统之间,通过I2C总线控制相机模块,通过CAN总线与微惯测量系统、相机、动量轮、推进阀门之间进行数据交换;
3)2路UART接口与RF通讯模块通讯,实现飞行器间、飞行器与测试系统通讯;
4)提供专用USB接口做为编程接口;提供一路独立USB口用于外部扩展。
根据以上分析,综合电子系统及对外接口关系设计为如图10所示。
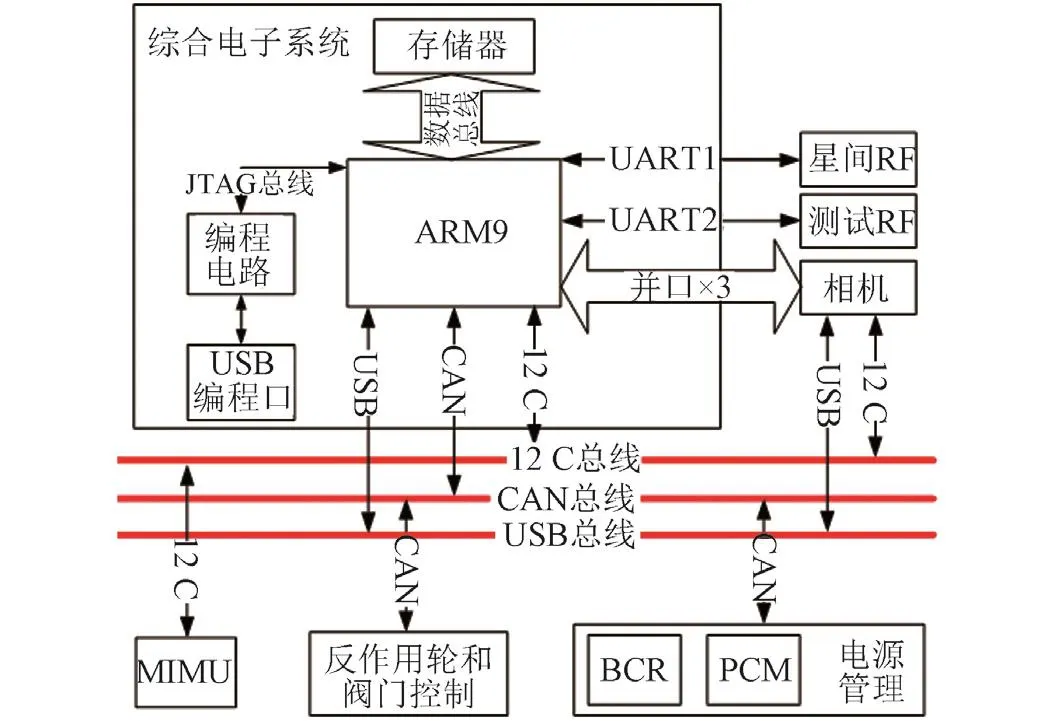
图10 综合电子系统及对外接口框图Fig.10 Integrated electronic system and external interface
3.4 通信分系统
通信分系统主要功能为实现测试台与飞行器、以及飞行器间的相互通讯。飞行器在飞行过程中应尽量避免外力对算法测试功能的干扰,因此应采用无线数据通讯方式。考虑到算法测试的需求,需要星间通讯通道主要承担飞行器位置与姿态信息的交流,作为控制算法的输入。根据总体设计,算法执行、状态记录等动作由飞行器自主完成,因此飞行器与地面站之间则只需传输关键指令与状态信息。
考虑到舱内飞行任务中有多个设备需进行双向通讯,为确保通讯链路可靠、设计简单,借鉴商用技术ISM Band中的2.4~2.52 GHz频率范围作为通讯段。为避免收发功能相互干扰,各不同频率的无线双向通讯模块,分别用于飞行器间和飞行器与测试系统间通讯。
通讯网络采用令牌环网络设计,如图11所示。各令牌点拥有独立硬件ID,可转发数据给指定令牌点。通过令牌“闲”和“忙”两种状态的定义,保证系统中只有一个站点在发送信息。每次发射令牌信息由测试系统发起。
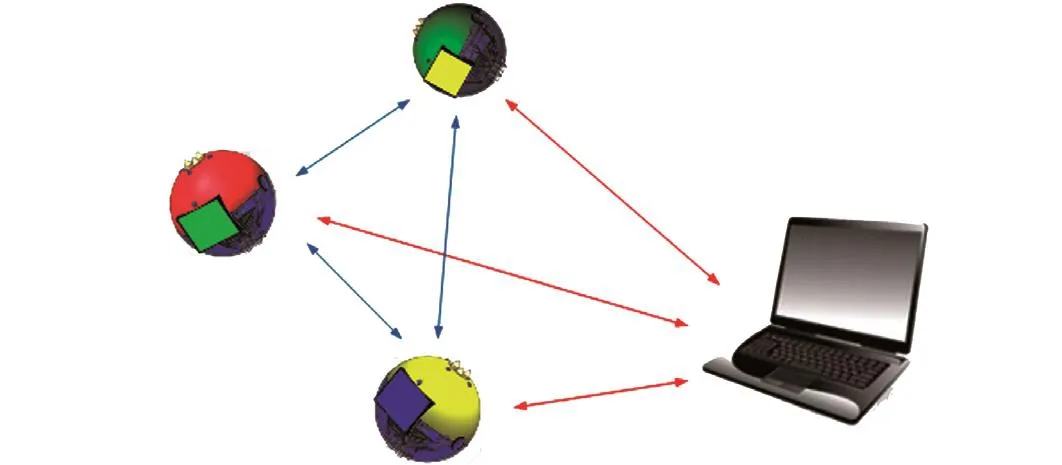
图11 通讯网络结构图Fig.11 Communication network structure
图11 中的网络结构设计,可支持飞行器间信息汇总于同一节点后发送给控制台,信息一次总量在百字节量级而无线通道速率在兆位/秒级。因此可选用Zigbee通讯模块。在使用过程中,能对RF参数、串口传输波特率进行设置。在每一个通信接口上,需要先接一个ZigBee协议模块,后接一个RF发射器或接收器,通过改变串口速率控制传输时间。
3.5 GNC系统
GNC系统包括敏感器和执行器2个部分。
1)GNC敏感器
GNC敏感器包括机器视觉和惯性测量两部分。根据舱内飞行器的任务分析,需实现高精度自主导航并具备环境探测能力,因此采用机器视觉予以实现。而惯性测量具备动态性能好、抗干扰、刷新率高的优势,可与视觉测量融合,提高系统性能,满足自主导航参数的刷新率要求。
机器视觉部分由3个光轴相互正交的50万像素摄像机构成,摄像机电子硬件由图像采集部分和图像传输两部分组成。两部分之间通过SCCB(OmniVision Technologies Serial Camera Control Bus)总线和并口实现控制指令和数据传输[18]。
在视觉的基础上,加入高精度商用MIMU实现数据融合,以提高系统的短期精度和动态性,实现总体指标要求的不低于10 Hz的导航状态刷新率,满足绝大多数算法验证的需求,其加速度计和陀螺仪的零偏稳定性应达20 μg和8°/h。
测量分系统在地面利用高精度转台和专用图像标定板进行联合标定,在轨更换或维修后,通过机械接口的设计,在线自标定与补偿保证系统精度[19]。
2)GNC执行器
考虑到舱内飞行器的运行环境,地磁场被空间站舱段屏蔽,因此微纳卫星常用的磁力矩控制方式不可用。因此姿态执行器采用三轴反作用轮选用成熟货架产品如Cubewheel,系统稳定经济,已成功实现在轨应用,满足一般微纳卫星的控制需求。轨控执行器采用微推进器,其工质为CO2冷气,属于舱内气体环境成分并可通过环控系统加以吸收和循环,因而符合安全性设计。CO2无毒无污染,可以重复加注,安全高效。推进系统结构设计如图12。按照位置机动满足30 s内运动2 m,最大速率不超过0.1 m/s,位置保持与机动所需的速度增量为0.14 m/s;而姿态保持根据经验所得的速度增量需求为1.14 m/s。根据火箭方程估算,所需推进剂为0.15 kg。推进系统设计的最大推力≥0.2 N,推进剂加注量≥0.3 kg(按照室温下液态CO2密度估算),单次加注可支持飞行试验3 h。

图12 飞行器CO2推进系统组成Fig.12 Composition of the INS CO2propulsion system
12个推力器喷嘴分布在飞行器6个面上,利用记忆合金管接头的高效率组装、高可靠性优点,实现快速装配集成,其布局如图13,形成平动推力和转动力矩,以实现三轴位置控制、动量装置卸载和辅助三轴姿态控制。
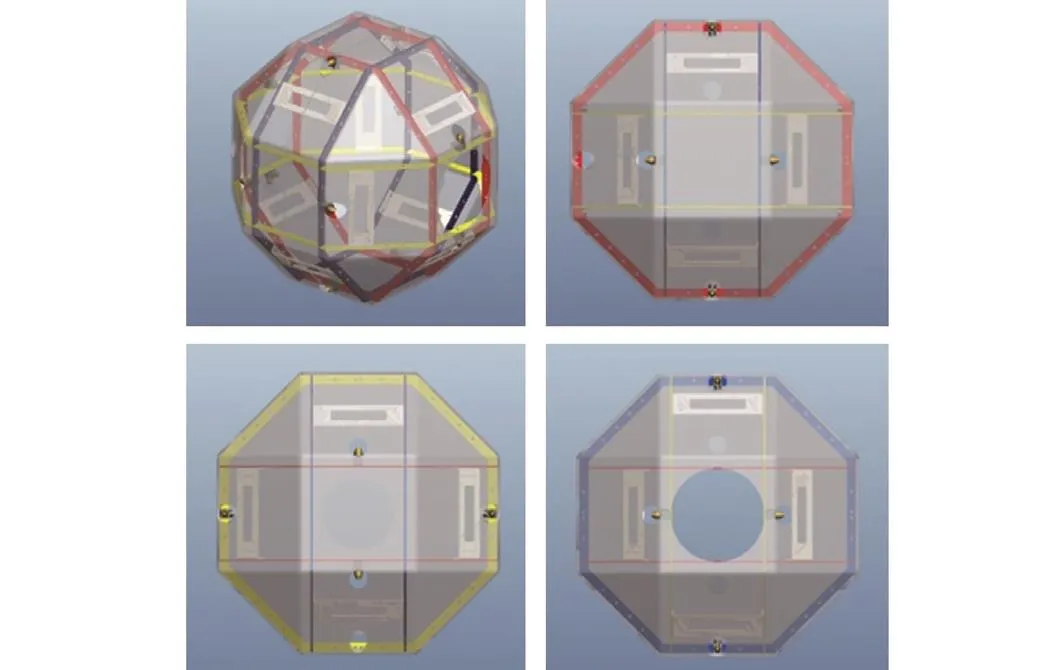
图13 飞行器推力器喷管布局Fig.13 Thruster nozzle layout of the INS
4 舱内飞行器试验方案及仿真验证
4.1 在轨飞行试验方案
通过软件模块的更换以及航天员的配合完成不同类型的具有一定难度的飞行验证试验。按照微纳卫星一般的测试流程以及在轨算法测试的需求,借鉴SPHERES等卫星的任务设计,在轨试验内容主要包括:
1)单星基本功能测试:硬件测试、软件测试、姿轨控试验、通讯系统试验。
2)自主交会对接试验:合作/非合作相对导航、自主交会对接控制算法、对非合作旋转目标的自主交会。
3)两星/多星编队试验:相对导航算法、编队飞行控制算法、编队初始状态建立、不同编队构型飞行试验。
4.2 地面测试及仿真
通过舱内试验飞行器地面半实物仿真试验验证平台硬件、舱内飞行动力学、GNC系统和控制算法的有效性,并为飞行试验进行技术积累。
地面半实物仿真试验需覆盖实际飞行试验所有项目,包括飞行器状态检测、自主交会对接试验、编队飞行控制试验三类。采用MATLAB 2014a开展了自主交会控制算法的仿真研究(计算机配置为英特尔(R)Core(TM)i7-4900 CPU @ 3.60 GHz,8.00 GB RAM),考虑地球引力J2项摄动、舱内空气阻力影响,仿真步长0.01 s,结果如下:
设初始时刻空间站舱内的被动飞行器轨道根数为 a0=6771137 m,e0=0,i0=42.78°,Ω0=120°,ω0=60°,f0=30°,主动飞行器相对被动飞行器的相对位置和相对速度分别为 Rref=[2.0,0.0, 0.0]T(m),Vref= [0.0, 0.0, 0.0]T(m/s)。考虑舱内空间尺度,假设主动飞行器在初始时刻位于被动飞行器后方2 m停泊点。采用指数减速方式进行交会逼近,设指数减速系数为 a=-0.07,终端时刻相对速率为 v0ρT= -0.01 m/s。飞行器初始质量5 kg,三个控制方向的发动机推力大小均为0.12 N。迹向、径向、法向的PID控制参数根据相对运动轨迹控制动态、稳态特性选取如表1。
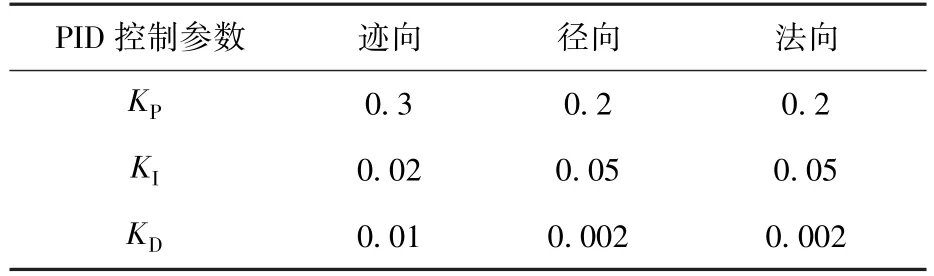
表1 自主交会PID控制参数Table 1 Control parameters of independent rendezvous PID control
根据上述参数,对舱内飞行器自主交会过程进行仿真。主动飞行器初始时刻位于停泊点,处于相对保持状态;在交会启动时开始在迹向连续控制加速,当位置和速度达到标称值后,则按照指数减速规律完成后续逼近控制。
考虑到空间站舱段的环境特点,舱内飞行的动力学特性与在轨实际飞行存在差异。其主要影响因素来自于舱内的大气环境,因而飞行器受到的额外干扰力为空气阻力,且与舱内气流速度、空气密度、飞行器几何尺寸及运动参数有关。则空气阻力Fa及力矩Ma可由式(1)表示:

其中,ρ为舱内空气密度;S为飞行器空气阻力面积,Vr为飞行器与空气的相对运动速度矢量,Cp为卫星质心至压心矢径。
仿真中取 ρ=1.2 kg/m3,S=3.14 ×102cm2,Cp=1 cm,舱内空气自上向下流动,流速0.1 m/s。所得自主交会过程的相对状态变化规律见图14,交会过程轨道面内的相对运动轨迹见图15,交会过程相对运动轨迹比较平滑,径向位置误差的最大振荡幅度小于0.035 m,交会过程耗时约37 s。
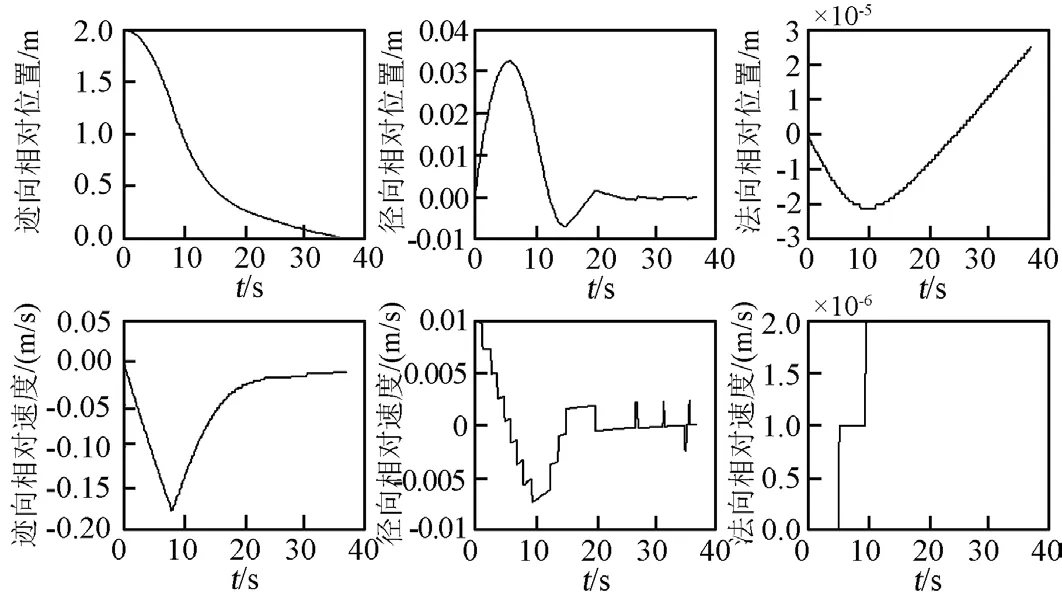
图14 自主交会相对运动状态随时间变化情况Fig.14 The relative motion state of the independent rendezvous versus time
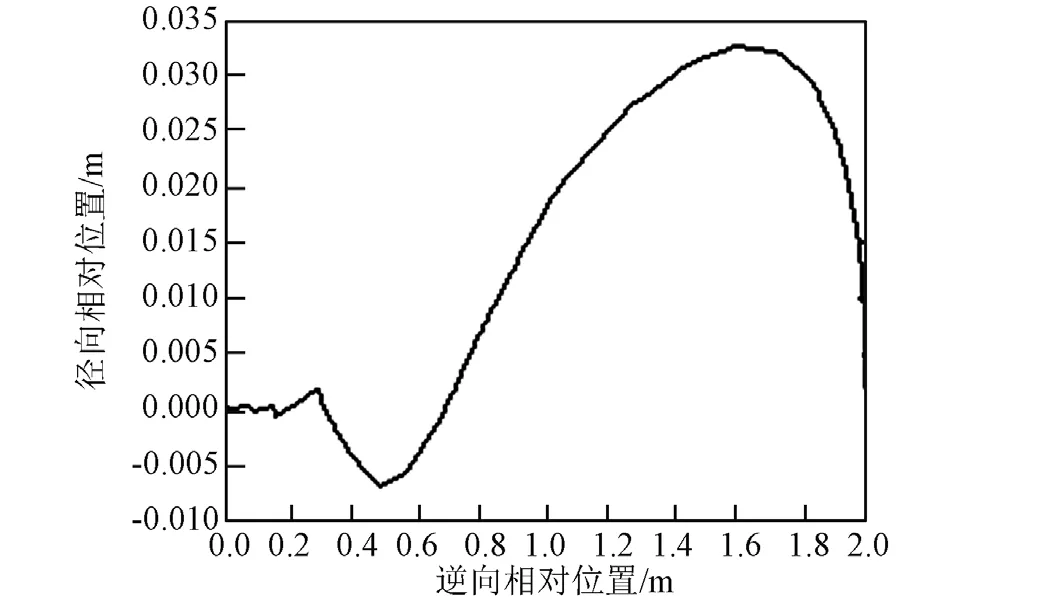
图15 自主交会轨道面内相对运动轨迹Fig.15 Relative motion trajectory in the surface of the autonomous rendezvous orbit
5 结论
1)舱内飞行器可便捷支持导航与控制等算法验证,可开展交会与编队等算法在天基平台上的演示验证。模块化设计使其具备系统扩展能力,可升级为舱内机器人开展在轨服务。
2)本文在舱内飞行器分系统设计中考虑了低成本、实用性等性能需求,指标达到设计要求,可为我国舱内飞行器的研制和试验提供参考。
参考文献(References)
[1] Bualat M,Barlow J, Fong T, et al.Astrobee: Developing a free-flying robot for the international space station[C] //AIAA SPACE 2015 Conference and Exposition.2015:4643.
[2] Bradshaw J M,Sierhuis M,Gawdiak Y,et al.Adjustable autonomy and teamwork for the personal satellite assistant[C]//Proceedings of the IJCAI-01 Workshop on Autonomy, Delegation,and Control:Interacting with Autonomous Agents.2001.
[3] Kong E M,Saenz-Otero A,Nolet S,et al.SPHERES as formation flight algorithm development and validation testbed:current progress and beyond[R].NASA/CP-2005-212781,2004.
[4] 杨彪,胡添元.空间站微重力环境研究与分析[J].载人航天,2014,20(2):178-183.Yang Biao,Hu Tianyuan.Research and analysis of microgravity environment in space station[J].Manned Spaceflight,2014, 20(2): 178-183.(in Chinese)
[5] Nolet S,Saenz-Otero A,Miller D W,et al.SPHERES operations aboard the ISS: Maturation of GN&C algorithms in microgravity[C] //30th Annual AAS Guidance and Control Conference.2007:07-042.
[6] Saenz-Otero A,Aoude G,Jeffrey M M,et al.Distributed satellite systems algorithm maturation with SPHERES aboard the ISS[C]//International Astronautical Congress, Glasgow,Scotland.2008.
[7] Miller D,Saenz-Otero A,Wertz J,et al.SPHERES:a testbed for long duration satellite formation flying in micro-gravity conditions[C] //Proceedings of the AAS/AIAA Space Flight Mechanics Meeting, Clearwater, FL, Paper No.AAS 00-110.2000.
[8] Micire M,Fong T,Morse T,et al.Smart SPHERES:a telerobotic free-flyer for intravehicular activities in space[C]//AIAA SPACE 2013 Conference and Exposition.2013:5338.
[9] Tweddle B E, Müggler E, Saenz-Otero A, et al.The SPHERES VERTIGO Goggles:Vision based mapping and localization onboard the International Space Station[C]//Proc.iSAIRAS.2012.
[10] Chintalapati S, Holicker C, Schulman R, et al.Update on SPHERES-Slosh for acquisition of liquid slosh data aboard the ISS[ M] //49th AIAA/ASME/SAE/ASEE Joint Propulsion Conference.2013:3903.
[11] Dorais G A, Gawdiak Y.The personal satellite assistant: an internal spacecraft autonomous mobile monitor[ C] //Aerospace Conference, 2003.Proceedings.2003 IEEE.IEEE,2003,1:1-348.
[12] Park I W,Smith T,Wong S W,et al.Developing a 3-DOF compliant perching arm for a free-flying robot on the International Space Station[C] //Proc.IEEE Conf.on Robotics and Automation.2015.
[13] Smith T, Barlow J, Bualat M, et al.Astrobee: A new platform for free-flying robotics research on the international space station[R].ARC-E-DAA-TN31584, 2016.
[14] Yoo J,Park I W,To V,et al.Avionics and perching systems of free-flying robots for the International Space Station[C]//Systems Engineering(ISSE),2015 IEEE International Symposium on.IEEE,2015:198-201.
[15] 安君帅,张生玥,肖跃.国内外小卫星的发展现状及前景[C]//第十二届卫星通信学术年会论文集,2016.An Junshuai, Zhang Shengyue, Xiao Yue.Development status and prospect of small satellite[C]//20th Annual Conference on satellite communications, 2016.(in Chinese)
[16] 葛榜军.中巴地球资源卫星第二发星和创新一号小卫星一箭双星发射成功[J]. 航天器工程,2003,12(4):16.Ge Bangjun.CBERS-2 and cascom-1 small satellite successfully launched[J].Spacecraft Engineering, 2003, 12(4):16.(in Chinese)
[17] 张召才. 吉林一号卫星组星[J]. 卫星应用,2015(11):89.Zhang Zhaocai.Jilin 1 satellite group[J].Satellite application, 2015(11): 89.(in Chinese)
[18] Shi S, You Z, Zhao K, et al.A 6-DOF Navigation method based on iterative closest imaging point algorithm[J].Scientific reports, 2017, 7(1): 17414.
[19] Shi S, Zhao K, You Z, et al.Error analysis and calibration method of a multiple field-of-view navigation system[J].Sensors, 2017, 17(3): 655.
