双馈直线电机定子磁链定向矢量控制研究
2018-04-24李拥军
李拥军
(湖南磁浮交通发展股份有限公司,湖南 长沙412000)
0 引 言
双馈直线电机是一个非线性、强耦合、多变量的系统。简单地对它进行闭环控制而不进行解耦,控制效果并不理想。为了实现解耦控制,需要采用矢量控制方法将电机某一电磁量的空间矢量定向于同步旋转坐标系的dQ轴,降低电机各物理量的耦合程度,以达到良好的控制效果,并简化控制过程。
文献[1]采用气隙磁场定向的矢量控制方案,可以直接控制动子侧电流实现调速,但气隙磁场定向系统中磁链关系和转差关系存在耦合,需要增加解耦器实现完全解耦控制;文献[2]介绍了转子磁场定向控制方案,可以实现完全解耦控制,控制方法简单,具有较好的动态性能,应用较广泛,但磁链闭环控制系统中转子磁链的检测精度受转子时间常数的影响较大,降低了系统性能;文献[3]介绍了一种新的解耦方法,采用无刷双馈电机的双同步数学模型,把电机的功率绕组和控制绕组分别在各自的同步坐标系中进行磁场定向,实现了完全解耦控制,得到了良好的动态性能,但是需要观测的量较多,控制精度不够,控制方法复杂。本文为了避免控制系统对转子侧参数的依赖,提高系统鲁棒性,获得良好的动静态性能和控制精度,考虑采用定子磁链定向矢量控制策略。
1 双馈直线电机数学模型
为了简化双馈直线电机的数学模型,本文建立双馈直线电机在d-q坐标系下的等效数学模型。该模型采用如下假设:(1)忽略电机磁路饱和,电机磁路为线性,不考虑温度和频率变化对电阻的影响;(2)忽略直线电机的齿槽效应和各种边端效应;(3)不计铁芯的涡流和磁滞损耗;(4)三相绕组对称,定动子供以三相交流电,每相绕组产生的基波磁动势沿气隙周围按正弦分布;(5)电机动子侧参数全部折算到定子侧,折算后每相绕组数相同[4-5]。
电压方程为:
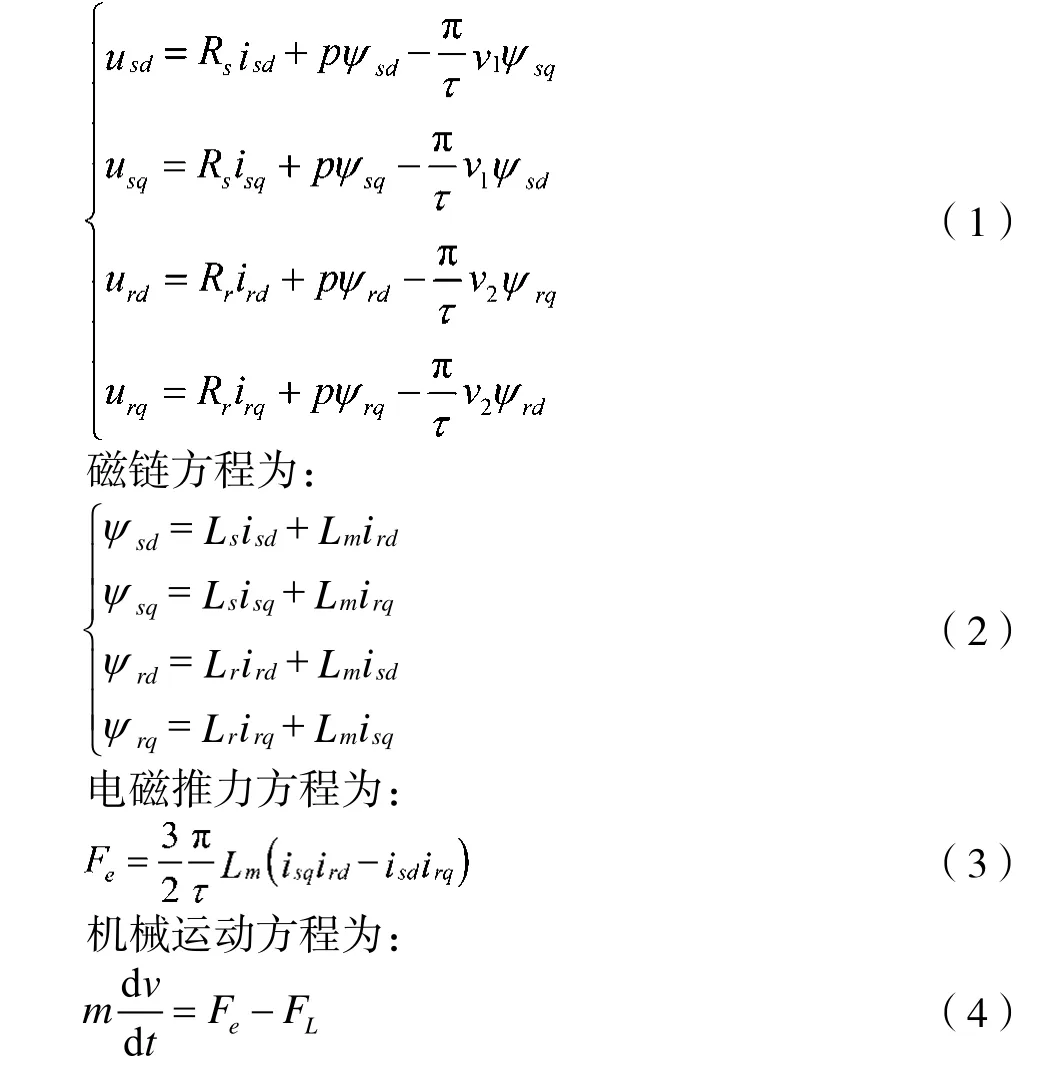

式中Rs、Rr分别为定、动子电阻;Ls、Lr、Lm分别为定、动子自感及定动子之间的互感;v1、v2分别是定、动子行波磁场的速度;o^为电机极距;p为微分算子;Fe、FL分别是电机推力和负载。
2 双馈直线电机控制策略
2.1 定向矢量选择
双馈直线电机的定子绕组直接由工频电源馈电,动子绕组直接连接变频器的输出端。为了实现解耦控制,达到直流电机的控制性能,必须应用矢量控制技术将实际的交流量分解为有功分量和无功分量,并分别对这两个分量进行闭环控制[6]。
电动机中有6个基本矢量:定子电压us、动子电压ur、定子电流is、动子电流ir、定子磁链Ψs和动子磁链Ψr。选择不同的矢量,对应的控制性能也是不同的[7]。优缺点对比,如表1所示。
综合考虑以上各矢量控制的优缺点,本文选用定子磁链作为定向矢量。定子磁链定向的矢量控制方案,在一般的调速范围内可以利用定子方程作为磁链观测器,可达到较好的动静态性能,同时控制系统结构也相对简单[8]。
2.2 定子磁链定向矢量控制策略
按照矢量定向控制的惯例,将同步旋转d-q坐标系的d轴与定子磁链重合,逆时针旋转90°方向为对应的q轴,则系统的数学模型满足:

将式(6)代入电机数学模型,可得推力的表达式:

双馈直线电机的定子接到电压稳定的三相对称工频电源上,在定子绕组中感应的电动势的定子磁链保持不变。因此,由式(7)可见,电机推力仅由动子q轴电流分量单独控制。当点击速度外环采用PI控制器时,转矩的控制方程为:

表1 6种定向矢量的优缺点

其中,KnP、KnI分别为速度外环的比例系数和积分系数,n*为双馈电机的转速给定值,表述为电流给定形式为:

计算中,由于定子侧线路中产生的感抗远远大于定子电阻,所以忽略定子电阻的作用,磁链表达式为:

观察式(10)可知,定子磁链由动子d轴电流分量单独控制。显然,定子磁链定向矢量控制实现了电机转矩和磁链的独立调节。
2.3 动子电压前馈补偿
计算定子磁链时,为了计算方便并简化控制,忽略定子电阻的影响。但是,当电机工作在低速时,定子电阻压降占端电压的大部分,对系统性能影响较大。所以,需要对控制系统进行改进,消除定子电阻和电机内部交叉耦合作用的影响。本文的改进措施是引入动子电压前馈补偿。
根据电压方程和磁链方程消除动子磁链,得到由定子磁链和动子电流组成的动子电压表达式[5]:

式中σ=(LsLr-L2m)/Ls为漏磁系数,ωs是d-q坐标轴的旋转角速度,s是电机转差率。
采 取 前 馈 补 偿 控 制 策 略, 将 -sωsσirq、sωsσird+两个交叉耦合项作为前馈部分引入,则动子电流d、q轴分量分别由对应的动子电压d、q轴分量单独控制。相应地,动子电流控制环和前馈补偿部分为:

采用PI控制器,相应的控制方程如下:
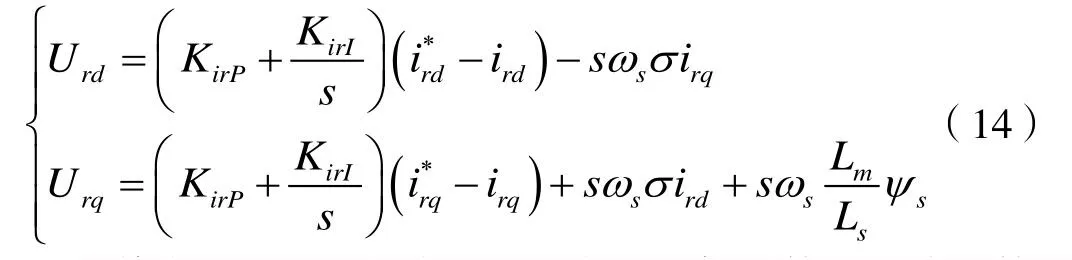
其中,Kirp、KirI为动子电流内环比例系数和积分系数,ird、irq分别为动子电流d轴、q轴分量的给定值。系统控制框图,如图1所示。
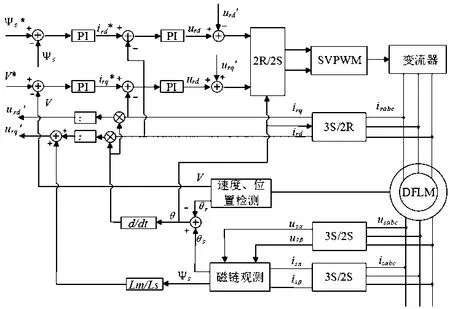
图1 定子磁链定向矢量控制框图
3 仿真与分析
3.1 定子磁链定向矢量控制策略的仿真分析
为验证定子磁链定向矢量控制方案的可行性,在Matlab/Simulink环境下搭建仿真模型,对控制系统进行仿真分析。电机主要仿真参数,如表2所示。
电机为空载启动,电机速度初始给定为15m/s后,在6 s时将速度给定为同步速度25 m/s;在10 s时给定速度提高到超同步速度30 m/s,使电机运行在超同步状态;15 s时下降到次同步速度20 m/s。观察给定值变化时速度的跟随情况,以分析定子磁链定向矢量控制下电机的动态性能。

表2 电机仿真参数
图2(a)中,电磁转矩波形在启动初期震荡短时间后可以快速稳定,给定速度变化以及负载突变时电磁转矩均能够快速响应。由图2(b)的电机速度波形可以看到,电机转速可以跟随速度给定快速变化,当负载突变时,转速仍可以保持稳定不变;图2(c)和图2(d)则分别为电机定子电流波形、动子电流波形。由此可知,双馈直线电机采用定子磁链定向矢量控制策略时,可以获得良好的动静态性能。
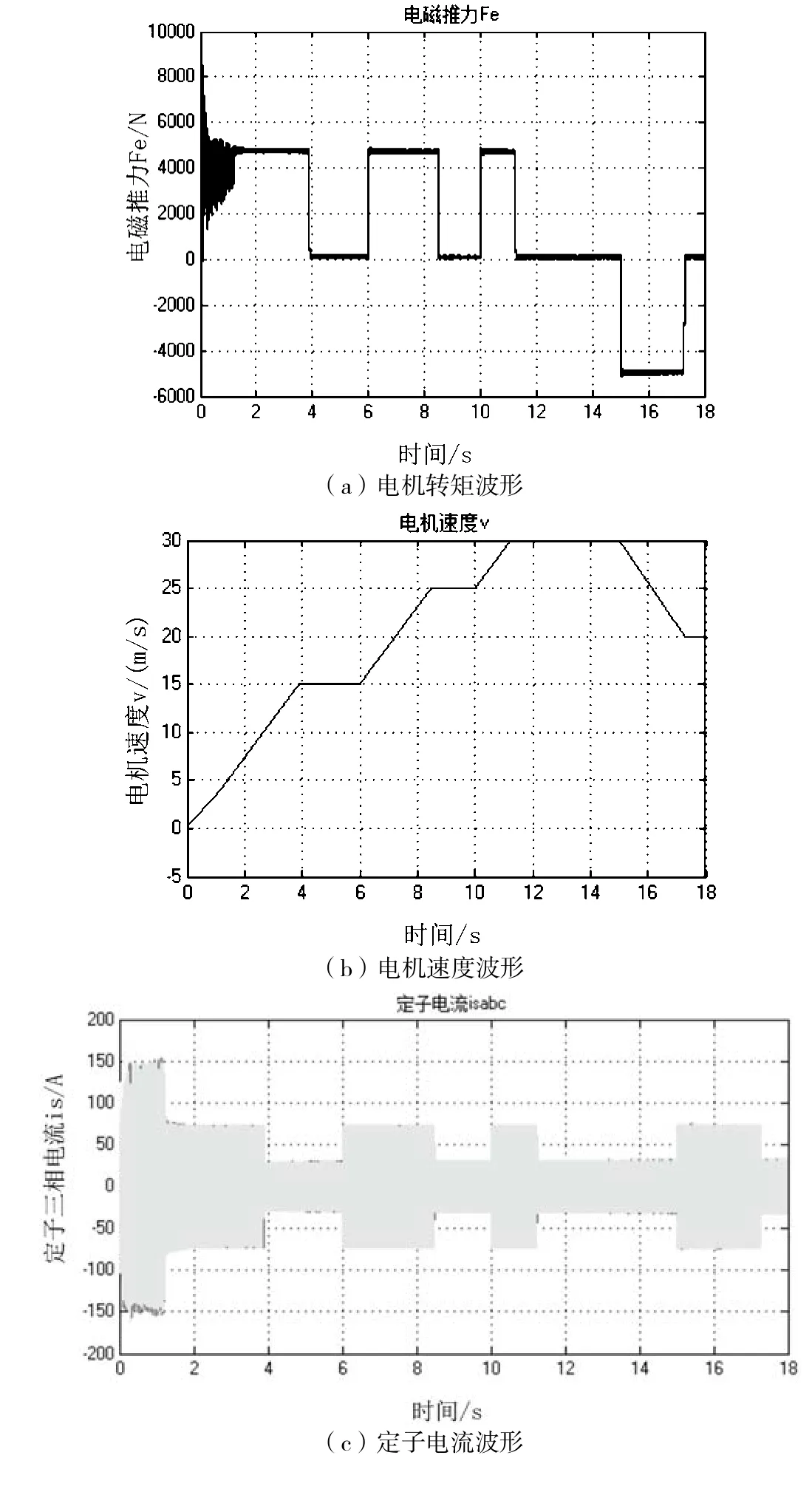
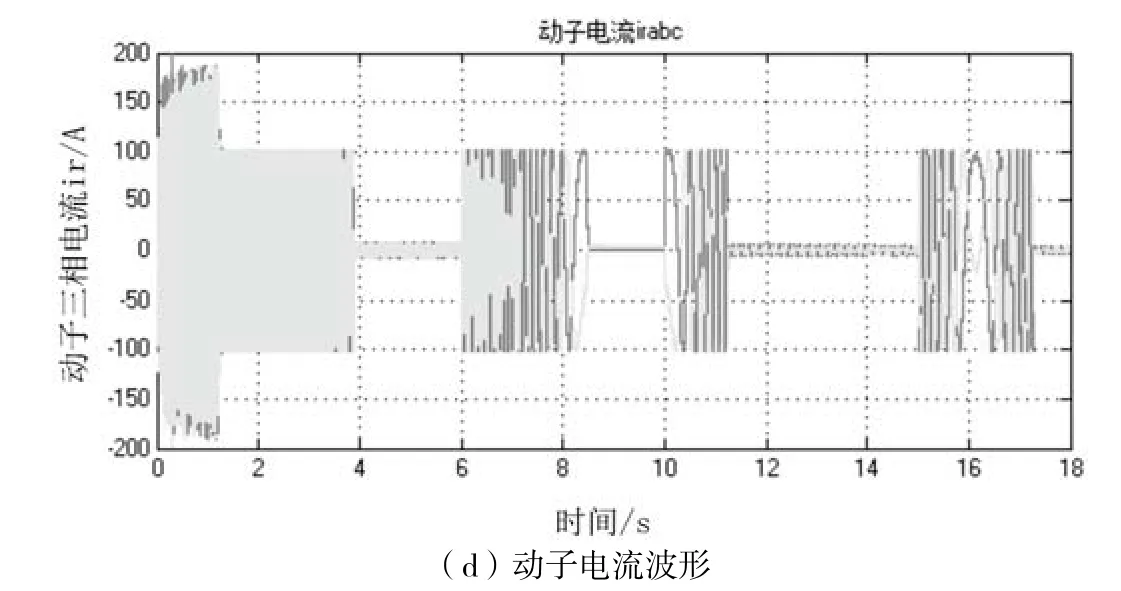
图2 定子磁链定向矢量控制仿真结果
3.2 引入动子电压前馈补偿的控制系统仿真分析
仿真参数、速度和负载给定值变化情况均不变,加入动子电压前馈补偿后,对控制系统进行仿真,结果如图3、图4所示。

图3 加入前馈补偿后电磁转矩仿真波形

图4 加入前馈补偿后电机速度仿真波形
由图3仿真波形可知,当引入动子电压前馈补偿后,电磁转矩初期振荡幅值明显减小,振荡时间缩短,可以快速稳定。图4仿真结果显示,速度给定值变化时,加速和减速过程明显加快。由此可知,动子电压前馈补偿的引入,可以在不影响电机稳态性能的前提下,加快动态响应的速度。
4 结 论
文章搭建了双馈直线电机在d-q坐标系下的仿真模型,详细介绍了双馈直线电机的定子磁链定向矢量控制方法。在此基础上,为了抵消电机内部的耦合作用,引入了动子电压前馈补偿策略,并进行了仿真分析。仿真结果表明,电机采用定子磁链定向控制可以得到良好的动静态性能,引入动子电压前馈补偿后,可以进一步提高电机的动态响应速度。
参考文献:
[1] 黄科元,黄守道,何庆宁,等.双馈电机气隙磁场定向矢量控制调速系统的研究[J].中小型电机,2000,27(4):29-32.
[2] 杨向宇,申辉阳.无刷双馈电机的一种矢量解耦控制[J].电机与控制学报,2005,9(5):409-413.
[3] 王晓远,丁亚明,朱更明.无刷双馈电机矢量解耦控制方法的研究[J].湖南科技大学学报(自然科学版),2004,19(2):67-69.
[4] 冯晓云.电力牵引交流传动及其控制系统[M].北京:高等教育出版社,2009:155-175.
[5] 颜足成.基于定子磁链定向的双馈直线电机控制系统研究[D].成都:西南交通大学,2015.
[6] 李 岚.双馈电机控制技术[M].北京:中国电力出版社,2014:15-23.
[7] Grotstollen H.The Design of Long-stator Linear Motor Drives for Railcab Test Track[J].Journal of Power Electronics,2005,5(2):166-172.
[8] 程 源,王雪帆,熊 飞,等.绕线转子无刷双馈电机开环控制下的稳定性研究[J].中国电机工程学报,2013,(33):203-210.
