纯滞后系统控制算法的比较分析
2018-03-30夏百花王雪洁
夏百花 王雪洁
摘 要:文章以一个具体一阶纯滞后控制系统为例,分别采用常规PID控制和Smith预估补偿控制两种算法来消除纯滞后环节的影响,最后对两种算法进行Simulink仿真后对结果进行分析比较。
关键词:纯滞后;PID;Smith预估补偿
随着现代化工业进程的不断发展,工业控制过程越来越复杂,但被控对象和控制通道的滞后情况则是一种十分常见的现象。比如在水箱装置中,由于输送管道的存在,在水箱进水的过程中常常会有箱内水位的上涨量落后于送水量的情况。
一般可以将控制系统中的滞后分为容量滞后和纯滞后两种[1]。容量滞后通常也被称为容积滞后,通常包括测量滞后和传送滞后,它是指物料或能量传输到被控过程(对象)时由于遇到被控过程的阻力而导致系统对于扰动的响应在时间存在延迟的现象,通俗来说,是被控对象受到一定的扰动作用后,系统从不稳定重新回到稳定状态的响应过程。
纯滞后是指物料、能量或信号传输过程中由于介质的输送或热的传递需要一段时间产生的延迟。例如电加热炉温度控制系统中,在开始加温的同时,介质温度已经开始上升,但其升温曲线在起始时仍然接近水平,这种滞后就是容量滞后。而容器底部从加热到传感器出现反应需要一段时间,这个时间就是纯滞后。
纯滞后控制系统的特点为:当控制器产生控制信号后,在滞后时间范围内,被控对象完全没有反应,使得整个系统不能及时随被控变量的变化而进行调整以克服系统收到的扰动。因此,这样的过程必然会产生较为明显的超调量和较长的调节时间。所以,含有纯滞后环节的控制过程一直是控制科学中关注焦点之一。
本文主要以一阶纯滞后系统为例,介绍了常规PID控制算法[2]和Smith预估控制算法[3],并对这两种控制方案进行Simulink仿真[4]及结果分析。
1 常见的控制算法及仿真
通过Simulink对该控制系统进行仿真,采用临界比例度法进行整定常规PID控制器参数。当参数Kp=1.13,Ki=0,Kd=0时,系统响应出现等幅震荡。
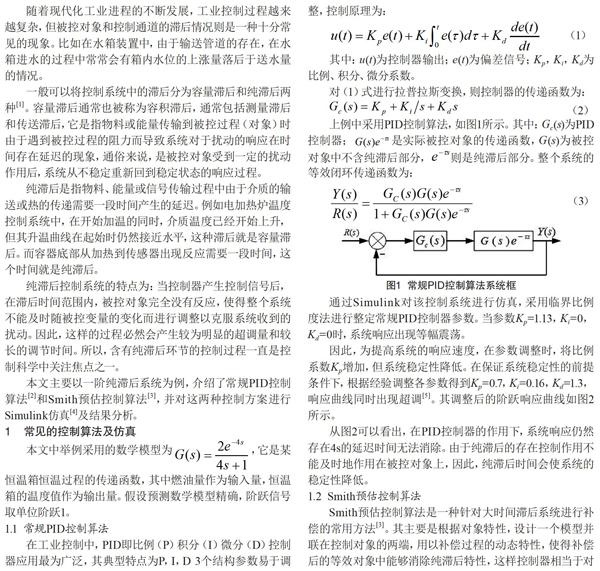
因此,为提高系统的响应速度,在参数调整时,将比例系数Kp增加,但系统稳定性降低。在保证系统稳定性的前提条件下,根据经验调整各参数得到Kp=0.7,Ki=0.16,Kd=1.3,响应曲线同时出现超调[5]。其调整后的阶跃响应曲线如图2所示。
从图2可以看出,在PID控制器的作用下,系统响应仍然存在4s的延迟时间无法消除。由于纯滞后的存在控制作用不能及时地作用在被控对象上,因此,纯滞后时间会使系统的稳定性降低。
1.2 Smith预估控制算法
Smith预估控制算法是一种针对大时间滞后系统进行补偿的常用方法[3]。其主要是根据对象特性,设计一个模型并联在控制对象的两端,用以补偿过程的动态特性,使得补偿后的等效对象中能够消除纯滞后特性,这样控制器相当于对一个没有时间滞后的系统进行控制,从而消除或减弱闭环系统中纯滞后因素带来的影响。图3为Smith预估补偿控制系统框图,其中虚线方框中的等效传递函数为,系统简化框如图4所示。
由图4可以看出,纯滞后系统经过Smith预估补偿后,闭环传递函数特征方程中消去了纯滞后环节,即消去了纯滞后对控制系统控制品质的影响。(4)式分子中的对于系统来说,仅表示将控制响应曲线在响应时间轴上往后推迟一个时间常数τ。
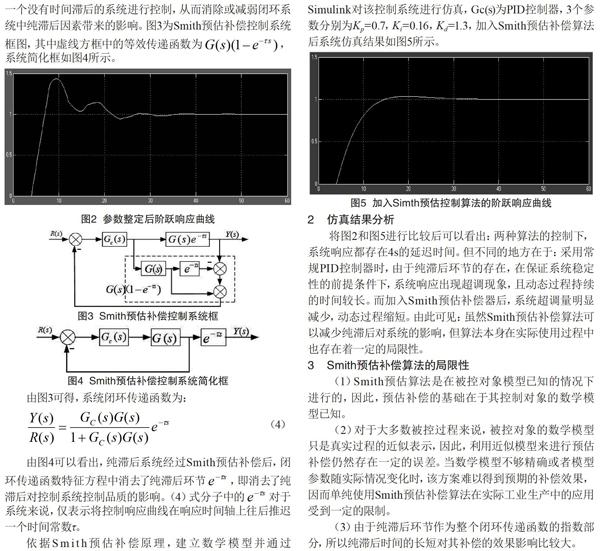
依据Smith预估补偿原理,建立数学模型并通过Simulink对该控制系统进行仿真,Gc(s)为PID控制器,3个参数分别为Kp=0.7,Ki=0.16,Kd=1.3,加入Smith预估补偿算法后系统仿真结果如图5所示。
2 仿真结果分析
将图2和图5进行比较后可以看出:两种算法的控制下,系统响应都存在4s的延迟时间。但不同的地方在于:采用常规PID控制器时,由于纯滞后环节的存在,在保证系统稳定性的前提条件下,系统响应出现超调现象,且动态过程持续的时间较长。而加入Smith预估补偿器后,系统超调量明显减少,动态过程缩短。由此可见:虽然Smith预估补偿算法可以减少纯滞后对系统的影响,但算法本身在实际使用过程中也存在着一定的局限性。
3 Smith预估补偿算法的局限性
(1)Smith预估算法是在被控對象模型已知的情况下进行的,因此,预估补偿的基础在于其控制对象的数学模型已知。
(2)对于大多数被控过程来说,被控对象的数学模型只是真实过程的近似表示,因此,利用近似模型来进行预估补偿仍然存在一定的误差。当数学模型不够精确或者模型参数随实际情况变化时,该方案难以得到预期的补偿效果,因而单纯使用Smith预估补偿算法在实际工业生产中的应用受到一定的限制。
(3)由于纯滞后环节作为整个闭环传递函数的指数部分,所以纯滞后时间的长短对其补偿的效果影响比较大。
[参考文献]
[1]俞金寿,孙自强.过程控制系统[M].北京:电子工业出版社,2008.
[2]胡寿松.自动控制原理[M].5版.北京:科学出版社,2007.
[3]朱晓东,王军,万红.基于Smith预估的纯滞后系统的控制[J].郑州大学学报(工学报),2004(1):77-81.
[4]张德丰.Matlab控制系统设计与仿真[M].北京:电子工业出版社,2009.
[5]崔栋刚,张彦斌.纯滞后过程控制算法的研究[J].控制工程,2005(4):368-369.
