轻型越野车自动驾驶线控化改装思路
2018-03-20杨懿
杨 懿
(厦门金龙旅行车有限公司,福建 厦门 360000)
引言
随着电子技术在汽车领域的快速发展,无人驾驶将会成为汽车设计的下一个重点。统计表明,大部分致命的汽车行驶事故是由人为原因诱发[1]。通过装载高性能传感器和先进控制系统,辅助驾驶功能有利于驾驶员及时准确对外界环境做出合理的反应,从而保证驾驶员人身及财产安全。而将车辆进一步升级为无人驾驶系统,能使其在不适合人类工作的环境下进行作业。本文介绍的轻型越野车非常适合在人烟稀少的无公路地带行驶。所以,将越野车与自动驾驶功能相结合,将进一步提升 Tomcar的使用范围和实用意义。本文将探讨这一可能。
1 Tomcar当前情况分析
Tomcar采用模块化设计,对各大总成采用先分步安装,再总体拼装的模式。总体拼装需要使用Tomcar配备的夹具。Tomcar按其设计思路分为以下系统,如图1。
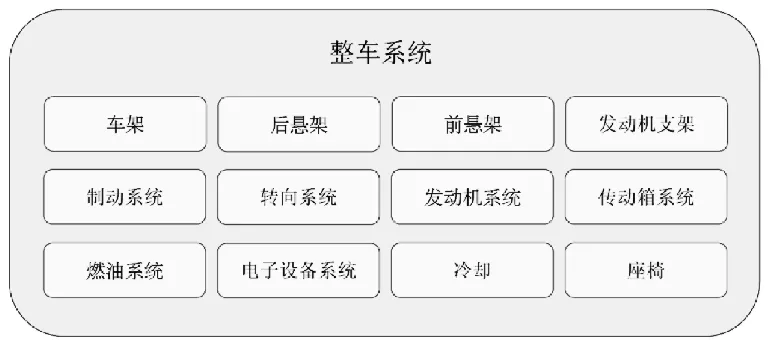
图1 整车系统架构
其中, 发动机系统有自己的 ECU,其内有对应的发动机控制算法,比如根据油门开度和汽车车速进行喷油量控制的算法,进而可实现对发动机油门、转速、扭矩的控制。这一算法的参数主要通过发动机调试得出,以C语言的形式写入发动机ECU 中。一般出于对参数的保密,发动机厂商不愿意提供在ECU中的C语言程序。所以发动机部分无法在改装中变化。电子设备系统主要包含车灯等低能耗的电器元件,所以目前 Tomcar的电池设备容量相对较小,改装后应该安装更大功率的电池。转向机构目前为机械式无助力转向,改装后应该增加电控转向装置,可根据输入信号实现对车辆转向角度及速度的控制。目前变速箱为手动无助力变速箱,改装后应该增加线性电机,也叫推杆马达,线性电机可根据输入信号实现对车辆挡位的控制。线性电机是在改装中添加的,其原本不一定属于变速箱机构。所以不一定会符合现有的总线协议。制动系统可实现对车辆制动液压的电子化控制,同时兼顾原车底盘的ABS功能,对车辆制动力的控制,防止抱死。这一部分相对成熟。图2为其三维设计图纸。
Tomcar中国公司于2008年对Tomcar的设计思路申请了相关专利,并于2009年获得相关专利。在此之后量产了几个批次的整车。其中部分整车被中国各大军事院校采购,比如国防科技大学,南京理工大学。在对Tomcar越野性能充分肯定的同时,也有部分中国军事院校提出了提高整车动力性能的愿望。所以,2017 起生产的Tomcar将换装更大功率的发动机。由原来的宗申发动机换成了奇瑞发动机或者五菱发动机。最大扭矩提高15%左右, 最大功率提升20% 左右。另外,由军方提出的修改成四驱建议,没有被采用。具体原因如下,前轮载荷占比较低,占整车重量的 33.3%,上陡坡时车辆重心又会后移,前轮的负荷降低较多,以30度(59.3%)的坡度为例,爬坡时前轮的载荷约为平地前轮载荷的 60%多,仅占整车总重的 18%,附着力较小,不能产生足够的动力。另外,改装四驱势必增加前轮的簧载质量。加装四驱会在略微提高汽车动力性能的同时,严重消弱 Tomcar优越的越野性能。汽车动力性能也可以通过换装更大功率的发动机来加强。所以,改装四驱得不偿失。Tomcar被指出的其他缺点主要是由于车龄较大,保养不当而产生的,这不会出现在新款(2017年初之后生产)的Tomcar上。国外已经有不少Tomcar的原版被装备于各国军队。在澳大利亚等国也广泛的用于民用。在Tomcar存在的这20 年来,Tomcar以其卓越的性能,深受各大大洲客户的好评。总而言之,在沙漠和草原等无公路地带,Tomcar的原型车都被认为是最好的选择。另外,国外已经有基于Tomcar原版的无人驾驶改装版本。以色列军方和美国军方都已经拥有了各自的无人驾驶版本。表1和表2给出了Tomcar的基本参数。
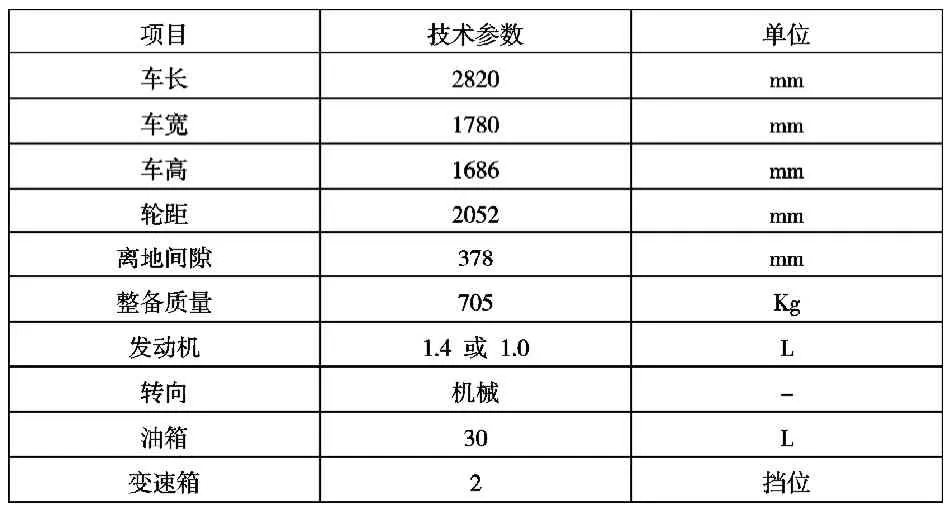
表1 Tomcar设计参数
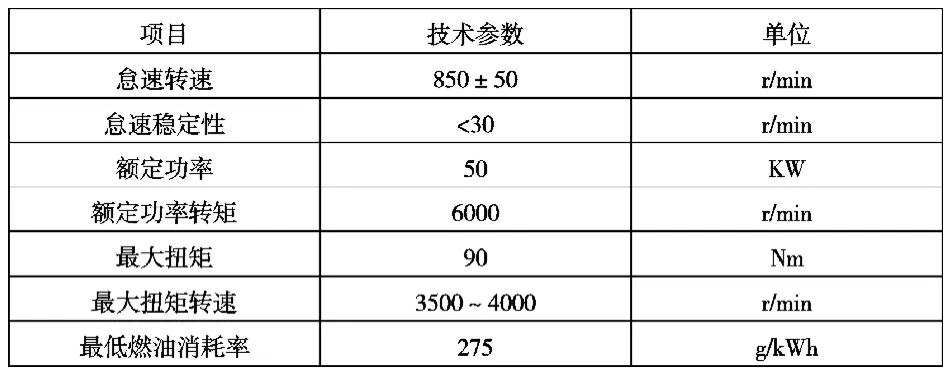
表2 Tomcar选用发动机参数
2 改装可能性分析
一般汽车上使用的CANbus,大多采用的是线性总线,如图 3。这种的核心件是唯一的导线,所有的节点都通过短的连接线和导线相连。这种结构在网络上扩展其他参与信息交换者非常容易。各个参与者都可以自由的发送信息,并分配在总线上。即每个参与者之间都有自由通讯的可能。但这种总线的前提是,它们必须遵守相同的通讯协议。但由于全地形车的总成数量有限,有些总成的ECU 并不遵守汽车界普遍使用的通讯协议。而且,ECU 内的程序确是大多数供应商不愿意提供的。另外,如果后期有为了实现无人驾驶的设备被安装在Tomcar上,如果这些设备也不遵守汽车界普遍使用的通讯协议,则Tomcar上的各个总成的ECU 也无法与这些设备通讯。所以,这一方案不是改装Tomcar的最佳方案。
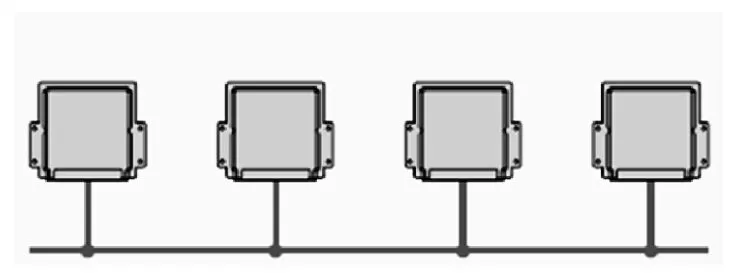
图3 线型总线拓扑结构[2]
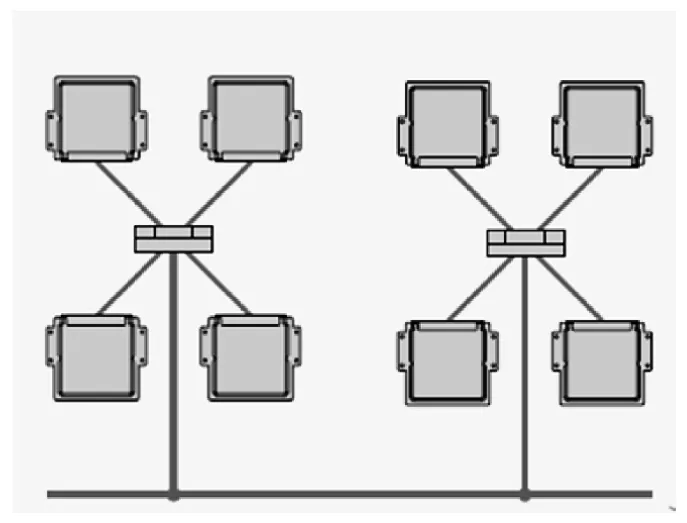
图4 星型总线拓扑结构[1]
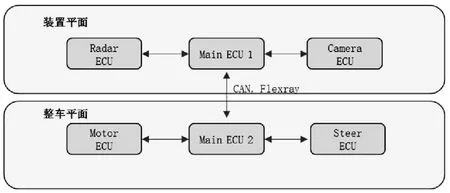
图5 星型总线拓扑结构思路在Tomcar 上的实现思路
对Tomcar的改装, 有另外的一套方案,即星型-总线拓扑结构,如图 4。这套方案将汽车分为两个层面,一个为整车层面,一个为装备层面。每个层面都有自己的网络集中设备(Host,所以改装后的Tomcar有两个网络集中设备。这一方案在车联网的时代被越来越多的采用[3],主要原因是处理器性能和信息传递速度的大幅上升克服了网络集中设备的信号阻塞。具体思路如图5 所示,Main ECU 2将翻译来自设备层面的信号,然后将控制信号传达到各个整车总成 ECU 中去。Main ECU 2也同时接收各个整车总成ECU的ECU,将它传达到设备层面的Main ECU 1,Main ECU 1再将决定,将信号给设备层面的哪个ECU。Main ECU之间的通讯可以使用CAN总线或者 Flexray。这样的优点主要有,其一不需要更改发动机ECU和转向机构的ECU,其二可以为未来扩充其他装备提供可能。因此,对于Tomcar的改装,本文建议采用星型-总线拓扑结构。
3 硬件与调试
改装分为大致七个阶段。其大致CAD 设计阶段,采购零件阶段,CAE仿真阶段,硬件在环仿真(Hardware-inthe-loop simulation, HiL),整车试制阶段,整车调试阶段,无人驾驶设备调试阶段。其中每个阶段都有相互交叉的时间段。比如由于市场上找不到完全理想的零件,就有可能重新修改CAD图纸。整车调试阶段如果发现问题,则有可能需要重新CAE计算。TOMCAR 图纸使用Siemens公司旗下的Solid Edge完成。拥有当今最主流的CAE软件,比如美国ANSYS 和法国Dassault的接口。既可以方便的使用FLUENT 和CFX 进行后期的流体仿真分析,也可以使用mechanical和ABAQUS做后期的有限元分析。使用这样的图纸,完全可以方便的基于这套图纸对现有硬件进行继续改进。整车层面的中心 ECU在第一阶段,可以直接使用 dSPACE, 以方便对整车进行Hardware in the loop的调试。dSPACE可以直接转化Matlab模型和Simulink模型为ECU所需要的C语言。使工程开发更加迅速。当结果令人满意之后,可以直接将 C 语言拷入Tomcar整车层面的中心ECU。这样的优点主要有两点,一为减轻开发阶段的难度,可借鉴国外技术,其二为量产阶段可以完全国产化。以下为对Tomcar改装计划的时间表,如表3。

表3 研发时间分析
如前文所提及,对Tomcar的线控化改装必然要添加合适的电机设备,这就要求调整Tomcar的硬件设施。这其中由于购买设备和雇佣相关人才的费用估算大致如下,见表 4。众所周知,时间,成本和质量三个因素互相影响和制约。当资金充足的时候,研发时间会减小,产品质量会上升。表3和表4所计算出来的数据是根据最低成本算出来的结果。换句话说,当经费上升,是可以加快研发速度的。但是研发成本却很难低于表格中所给出的价格。

表4 成本分析
4 无人驾驶设备扩充可能产生的问题
如前文所述,现有Tomcar的电池主要是为车灯等低能耗设备准备的。无人驾驶设备可能包括摄像头设备,雷达设备等相对于车灯需要更多能耗的电气设备。所以,为 Tomcar改装时需要更大容量的电池以及为了装备更大电池所有的预留空间。另外,在低速阶段,发动机转速略高于怠速工况,这时发动机功率较低,供能有限,存在不足使雷达等设备正常工作的可能。对此,一套合适的能源管理系统是有必要的,如图6。这一系统是虚拟的,其也有整车层面的中心ECU 进行控制。其思路为,发动机在高速阶段故意使用低速挡行驶,使发动机在行驶中产生过剩能量,从而为电池进行充电。以确保电池电能状态尽可能的处于一个比较高的状态。如果改装后的Tomcar将主要是以低速前进,可以考虑进一步的提高从发动机到车轮的传动比,从而使发动机在同一车速下有更高的转速,进而提高发动机功率。另外,电气设备在汽车巡逻时可能由于电负载的突然变化而被关闭[4]。为此,在为Tomcar开发的能源管理系统需要为不同的电器设备分配优先级,相对重要的电器设备会得到更高的优先级。这样,即使在电力不足的条件下,高优先级重要的电器的电力供应将被优先供应。优先级较低的电器设备将会先被关闭。
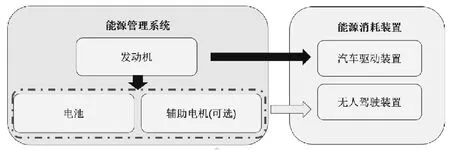
图6 能源管理系统
5 总结
本文在系统层面上介绍了Tomcar的各个组成系统。在考虑到现实零件购买的条件下,从工业界的角度,对其未来进行线控化改装提供了具体的可行思路并合理的估算了其产生的费用。研发时间大约为 13 个月,研发经费大致需要 581万元人名币。这一总需经费有可能分摊到其他研发经费中去。另外本文也对改装添加摄像头和雷达等无人驾驶的电气设备之后可能产生的潜在问题进行了分析并给出了对应的能源控制系统对这问题进行了合理的解。Tomcar 在按照本文思路进行改装后,不但不会对现在的整车越野性能产生不良的影响,而且可以提高整车动力性能大致15%至20%。
[1] 陈国华,曾辉.广东省特大道路交通事故统计分析及预防对策[J].中国安全科学学报,2010(10):106—112.
[2] R. Bosch, Bosch Automotive Electrics and Automotive Electronics:Bus systems, pp. 92-151.Wiesbaden: Springer Fachmedien Wiesbad-en, 2014.
[3] Hagiescu, U. D. Bordoloi, S. Chakraborty, P. Sampath, P. V. V. Ganes-an, and S. Ramesh,“Performance analysis of flexray-based ecu networks,” in Design Automation Conference,2007. DAC’07. 44th ACM/IEEE, pp. 284-289, IEEE, 2007.
[4] R. Jane, G. G. Parker, W. Weaver, R. Matthews, D. Rizzo, and M.Cook,“Optimal powermanagement of vehicle sourced military out-posts,” SAE International Journal of Commercial Vehicles, vol. 10,pp. 132-143, mar 2017.