马齿型玉米种子侧立定向定距输出装置的设计与试验
2018-03-09邢洁洁徐丽明袁全春段壮壮于畅畅
邢洁洁,徐丽明,袁全春,段壮壮,马 帅,于畅畅
马齿型玉米种子侧立定向定距输出装置的设计与试验
邢洁洁,徐丽明※,袁全春,段壮壮,马 帅,于畅畅
(中国农业大学工学院,北京 100083)
为了实现玉米种子的定向定距输出,该文设计了一种玉米种子侧立定向定距输出装置,并对其定向定距原理进行了分析。该装置包括侧立排序机构和定向定距机构2部分。侧立排序机构能够对成堆玉米种子进行分散、排序输送、分选和姿态变换使之变为一列呈侧立姿态排序的玉米种子,定向定距机构能够对侧立姿态的玉米种子进行定向和定距,使其尖端统一朝前、相邻种子之间间距一致,然后排序输出。以侧立喂入轨道的倾角、振幅1、定向定距转盘的角速度和侧立输出轨道的振幅2为因素,以玉米种子的定向定距成功率和定距间距为指标,对定向定距机构进行仿真试验,得到最佳工作参数:为3°、1为0.3 mm、为30 °/s、2为0.3 mm。搭建玉米种子侧立定向定距输出装置进行性能试验,结果表明在最佳工作参数下该装置工作稳定,玉米种子定向定距成功率为90.7%,定距间距平均为45 mm。该研究为后续机械化玉米定向播种提供了参考。
机械化;设计;农作物;玉米种子;侧立姿态;定向;定距
0 引 言
玉米是中国重要的粮食作物,玉米定向播种能够控制玉米种子的入土方位,使玉米植株叶片展开方向和果穗生长方向一致,有效改善作物在田间的光照和通风情况,在此基础上可以合理提高种植密度,以达到提高玉米单产的目的,并提高机械化收获水平[1-4]。玉米种子的定向定距输出和胚面动态连续识别是实现机械化玉米定向播种的关键,而玉米种子的定向定距输出又是玉米种子胚面动态连续识别的基础,因此玉米种子的定向定距输出技术十分重要。但是目前国内外关于玉米种子定向定距的研究较少,还没有成熟的实现方案。徐丽明等[5-7]提出了一种玉米种子定向方法,可以实现玉米种子尖端统一朝前,并对定向方法进行理论分析,但是无法对玉米种子进行定距处理;刘闻铎等[8]发明了一种定向种子块制造设备,通过对穗选后的种穗种子排列条上涂粘结剂后脱粒取出种子条或使用种条铲刀切下种子条用来制作玉米种子定向种块,这种方法能较好地保持玉米生物学特性排列顺序、无需进行玉米胚面识别,但对玉米穗规格质量要求较高,且依赖手工作业,效率低,铲种时玉米籽粒损伤严重;赵学观等[9]设计了玉米籽粒吸附摆放机构,该机构是实现定向播种的方法之一,但其前提是实现玉米种子的定向和定距。
在电磁振动作用下,半马齿长扁平型的玉米种子以平躺(水平)姿态被输送时,尖端朝向是随机无规律的[10],而以侧立姿态被输送时,受自身形状特点的影响,玉米种子只会有尖端朝前和尖端朝后2种自然状态,且当输送轨道倾斜角度较小时,玉米种子能以这2种状态稳定地向前运输[5-7]。所以对侧立姿态的玉米种子进行定向和定距会比较简单,只需要通过某种方法将尖端朝后的玉米种子也变为尖端朝前,同时对玉米种子进行间距固定处理,即可实现玉米种子的定向和定距。
为了实现玉米种子的定向定距输出,本研究以半马齿长扁平型的玉米种子为研究和工作对象,在电磁振动的基础上设计一种玉米种子侧立定向定距输出装置,该装置首先对成堆玉米种子进行分散、排序和侧立姿态变换,使之变为一列呈侧立姿态排序的玉米种子,之后对侧立姿态的玉米种子进行定向和定距,使其尖端统一朝前、且相邻种子之间间距一致,然后排序输出。利用ADAMS对该装置的关键机构进行仿真优化试验得到最佳工作参数,搭建玉米种子侧立定向定距输出装置进行性能试验,以期为后续玉米种子的胚面识别、定向包装以及机械化玉米定向播种提供参考。
1 玉米种子侧立定向定距输出装置的设计
1.1 装置结构
本研究以郑丹958玉米种子为对象,分级处理后选取半马齿长扁平型的种子。随机抽取100颗进行测量,外形尺寸(长、宽、厚)分别在[11.5 mm,8.4 mm],[9.4 mm,7.8 mm],[5.3 mm,4.4 mm]区间内。以此为基础,设计一种适用于玉米种子的定向定距装置(图1),该装置可分为3部分:侧立排序机构、定向定距机构和机架,其中定向定距机构是该装置的关键。

1. 圆周电磁振动器 2.料斗 3.直线电磁振动器1 4.支座1 5.步进电机 6.定向定距功能模块 7.底座 8.直线电磁振动器2 9.支座2 10.机架
1.1.1 侧立排序机构
玉米种子在进入定向定距机构之前要求玉米种子呈侧立姿态,并且玉米种子之间不能产生拥挤或交叉,根据这些要求设计侧立排序机构。圆周电磁振动料斗可以对成堆物料进行分散和排序输送[10-14],本研究在此基础上设计了侧立排序机构,包括圆周电磁振动器和能对玉米种子进行侧立排序的料斗2部分。料斗的设计如图2所示,料斗壁内侧有螺旋上升轨道,料斗壁外侧有分选轨道和侧立姿态变化轨道,螺旋上升轨道、分选轨道和侧立姿态变化轨道的最大圆周半径分别为125、156和168 mm,螺旋上升轨道螺距为25 mm[12]。
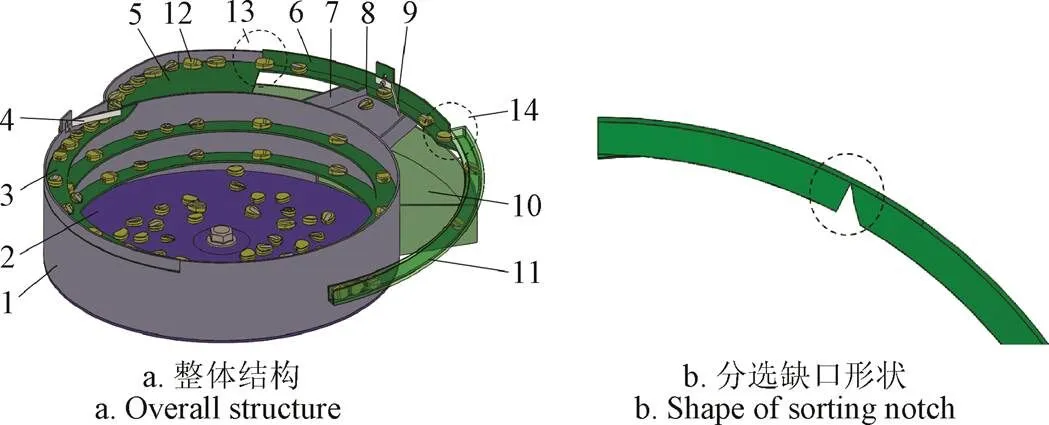
1. 料斗壁 2.料斗底面 3.螺旋上升轨道 4.限高刮板 5.过渡轨道 6.分选轨道 7.废料排出口 8.分选缺口 9.限厚刮板 10.回料盒 11.侧立姿态变化轨道 12.玉米种子 13.防拥挤区1 14.防拥挤区2
螺旋上升轨道宽9 mm,确保玉米种子只能单列向上输送,上升轨道末端安装有限高刮板,调节高度为7 mm,能够将堆叠的、竖立的以及侧立的玉米种子刮下掉入料斗中,确保从螺旋上升轨道末端输出的玉米种子为单层,且呈水平姿态。
分选轨道上有分选缺口和限厚刮板,分选缺口形状为由内往外逐渐增大的“V”形(图2b),尺寸正常的长扁平型玉米种子能顺利通过该缺口,而尺寸偏小或形状不规则的异形玉米种子则会从缺口处掉落,最后由废料排出口排出机构外;限厚刮板的高度可调,本研究设定为6 mm,目的是将厚度大于6 mm的异形玉米种子刮下掉落到废料排出口。由分选轨道输出的玉米种子进入侧立姿态变化轨道。
侧立姿态变化轨道结构如图3所示,为一段1/4圆弧的“U”形轨道,轨道内宽6 mm(只允许单列玉米种子通过),高10 mm,轨道截面沿圆弧顺时针扭转90°,由水平逐渐变为竖直。玉米种子以水平姿态进入侧立姿态变化轨道,在输送的过程中随着轨道的扭转进行姿态变换,最后变为侧立。
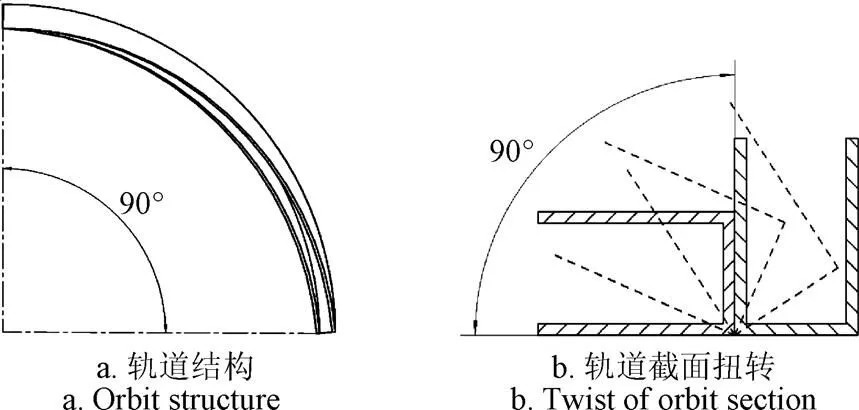
图3 侧立姿态变化轨道结构示意图
过渡轨道和分选轨道因轨道宽度不同,在连接处形成防拥挤区1,分选轨道和侧立姿态变化轨道因轨道半径不同在连接处形成防拥挤区2。防拥挤区的作用是:当前方轨道上的玉米种子发生拥挤时,防拥挤区上的玉米种子就会脱离轨道,进而缓解拥挤,防止玉米种子因相互拥挤在分选轨道上发生错误分选,或在侧立姿态变换轨道上产生侧立交叉。
在圆周电磁振动器的作用下,成堆玉米种子在料斗中经过分散、排序输送、分选和姿态变换过程后,变为一列呈侧立姿态排序的玉米种子,之后进入定向定距机构。
1.1.2 定向定距机构
刚进入定向定距机构的呈侧立姿态的玉米种子有2种状态:尖端朝前或尖端朝后。定向定距机构能够对侧立姿态的玉米种子进行定向和定距作用,使其尖端统一朝前,且相邻种子之间间距一致,然后排序输出。该机构主要由直线电磁振动器、支座、底座、步进电机、侧立喂入轨道、定向定距转盘、左右侧板、侧立输出轨道等组成,其中侧立喂入轨道、定向定距转盘、左右侧板和侧立输出轨道4部分组成定向定距功能模块(图4),该模块是定向定距机构的核心。侧立喂入轨道和侧立输出轨道的截面尺寸与侧立姿态变换轨道一致,只允许单列玉米种子侧立通过,2个轨道分别安装在2个直线电磁振动器的支座上,倾斜角度可调。侧立输出轨道分为前后2段,2段之间有个4 mm高的台阶[6-7]。定向定距转盘直径110 mm、厚5 mm,圆周上均匀分布有若干个定向定距型孔(下文简称型孔)。定向定距转盘平行处于左右侧板正中间,2个侧板间距与轨道内宽一致(6 mm)。由步进电机(35步进电机)带动其匀速转动,转速可调。

1.定向定距转盘 2.侧立喂入轨道 3.玉米种子 4.左右侧板 5.型孔 6.侧立输出轨道
由侧立排序机构输出的呈侧立姿态的玉米种子首先排序进入侧立喂入轨道,在直线电磁振动的作用下平稳地输送到定向定距转盘入口处,经过定向作用,玉米种子以尖端朝上的状态依次进入型孔,之后随着转盘匀速转动,在侧立输出轨道入口处以尖端朝前的状态依次滑出型孔,经过定距作用,玉米种子之间间距一致,最后在直线电磁振动的作用下由侧立输出轨道进行输出,输出的玉米种子尖端统一朝前,且间距一致。
1.2 定向定距原理
定向定距机构在对侧立姿态的玉米种子进行传输的过程中实现对玉米种子的定向和定距。定向定距机构要实现其功能需要理想的工作状态,即工作参数要恰当。该机构的工作参数包括:侧立喂入轨道的倾角、定向定距转盘的转速以及侧立喂入轨道和侧立输出轨道的振幅(即2个直线电磁振动器的振幅)。
1.2.1 定向原理
定向定距转盘上的型孔是依据半马齿长扁平型玉米种子的外形进行设计的,1个型孔只能容纳1颗玉米种子,且玉米种子在型孔中随着转盘转动时能够保持相对稳定,不会摇晃摆动。定向定距转盘圆周表面经过特殊处理,比较粗糙。侧立姿态的玉米种子与转盘圆周表面产生摩擦的部位主要是尖端和主体的周边轮廓(见图5)。玉米种子尖端的材质与玉米芯[15-16]类似,主要成分为纤维素、半纤维素和木质素,尖端表面粗糙,与定向定距转盘圆周表面之间的摩擦系数较大;主体材质主要是角质胚乳[17-18],表面是光滑的种皮,与定向定距转盘圆周表面之间的摩擦系数较小。
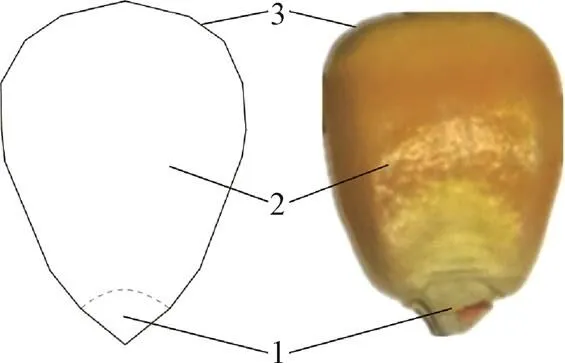
1.尖端 2.主体 3.主体的周边轮廓
调节直线振动器的振幅使侧立喂入轨道中的玉米种子不会相互拥挤,受自身形状特点(半马齿长扁平型)的影响,此时侧立的玉米种子只有尖端朝前和尖端朝后2种状态。玉米种子接触到定向定距转盘的圆周表面时,转盘开始低速转动,利用玉米种子的质心偏移特性,在定向定距转盘、侧立喂入轨道以及后边玉米种子的共同作用下,准备进入型孔的尖端朝前的玉米种子会发生顺时针转动使尖端朝上,而尖端朝后的玉米种子则会保持原有状态不变,这样2种状态的玉米种子都会以尖端朝上的状态进入型孔中,之后随定向定距转盘旋转,当被带到侧立输出轨道入口处时,在自身重力的作用下,以尖端朝前的状态依次滑出型孔,进入侧立输出轨道并在保持尖端朝前的状态向前传输,实现使玉米种子尖端统一朝前的定向功能(图4)。玉米种子定向过程的关键在于使玉米种子顺利地以尖端朝上的状态进入到型孔中。
本文假设定向定距机构工作状态理想,通过分析玉米种子在侧立面(平行于定向定距转盘平面)上的受力状态和运动状态来具体描述定向原理。
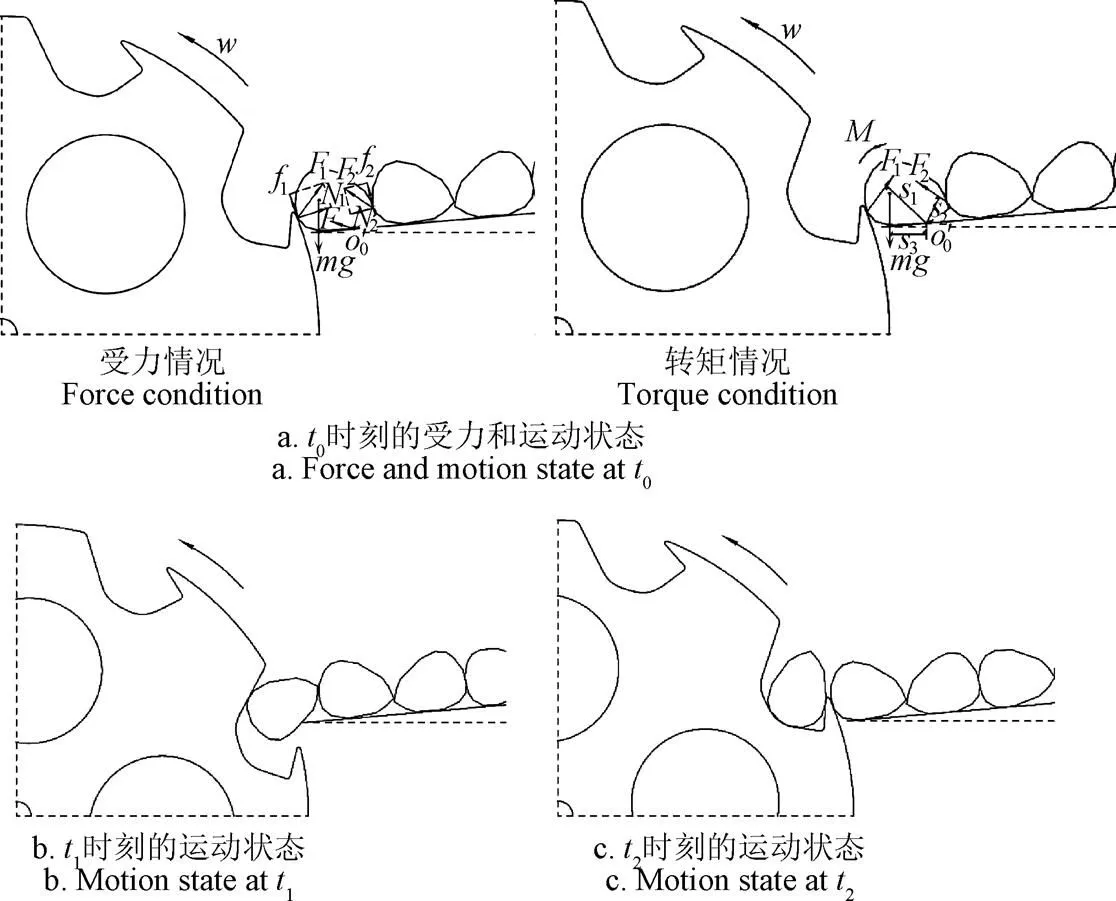
以玉米种子A为例进行分析,在完全进入型孔前,玉米种子A都处于动不平衡状态,除了自身重力外,还受到侧立喂入轨道底面对其的激振力、定向定距转盘圆周表面对其的推力1与摩擦力1,以及后边玉米种子对其的推力2与摩擦力2,令1与1的合力为1,2与2的合力为2。玉米种子A尖端朝前时,其受力和运动状态如图6所示。
0(转盘刚开始转动时)时刻,玉米种子A与侧立喂入轨道底面的接触点为0,种子尖端与定向定距转盘圆周表面接触。玉米种子A有绕点0顺时针转动的趋势,顺时针方向的转矩大小为

根据玉米种子的质心偏移特性可知,重力作用线在点0右侧,有利于玉米种子绕点0顺时针转动。由于玉米种子尖端与定向定距转盘圆周表面之间的摩擦系数较大,造成定向定距转盘转动时对种子A的摩擦力1较大,使1也较大。此时转矩大于零,玉米种子将沿着侧立喂入轨道底面顺时针转动,并在电磁振动的作用下继续向前运动。
1时刻,玉米种子A与侧立喂入轨道底面的接触点为1,种子主体的周边轮廓与定向定距转盘圆周表面接触,顺时针方向转矩大小为

重力作用线在点1左侧,但是力臂3很短,对玉米种子绕点1顺时针转动无作用,甚至有阻碍作用。由于种子主体的周边轮廓与定向定距转盘圆周表面之间的摩擦系数较小,造成定向定距转盘转动时对种子A的摩擦力1较小,使1也较小,另外,对比图6a和6b可知,相比0时刻,此时1和3都减小了,但1减小的幅度更大。由于以上原因,导致转矩减小甚至等于零,玉米种子将继续沿着侧立喂入轨道底面顺时针转动或保持该动作不变。
1. 定向定距转盘圆周表面 2.侧立喂入轨道底面 3.玉米种子A 4.型孔
1. Circumferential surface of directional and fixed-distance turntable 2.Bottom of lateral feeding orbit 3.Corn seed A 4.Hole
注 :为玉米种子A的质量,g;g为玉米种子A的重力,N;为侧立喂入轨道底面对玉米种子A的激振力,N;1和1分别为来自定向定距转盘圆周表面的摩擦力和推力,N;2和2分别为来自后边玉米种子的摩擦力和推力,N;1为1与1的合力,N;2为2与2的合力,N;0和1分别为0和1时刻玉米种子A与侧立喂入轨道底面的接触点;1、2和3分别为1、2和距接触点的力臂,mm;为玉米种子A的顺时针方向转矩,N·mm;为定向定距转盘圆周的角速度,(°)·s-1;为侧立喂入轨道的倾角,(°)。
Note:is the quality of corn seed A, g;g is the gravity of corn seed A, N;is the vibration force acted on corn seed A form the bottom of lateral feeding orbit, N;1and1respectively are the friction and thrust from the circumferential surface of directional and fixed-distance turntable, N;2and2respectively are the friction and thrust from behind corn seeds, N;1is the resultant force of1and1, N;2is the resultant force of2and2, N;0and1respectively are the contact point between corn seed A and bottom of lateral feeding orbit at0and1;1,2and3respectively are the arm of force from1,2andto the contact point, mm;isthe clockwise torque of corn seed A, N·mm;is the angular velocity of directional and fixed-distance turntable, (°)·s-1;is inclination angle of lateral feeding orbit, (°).
图6 玉米种子A尖端朝前时的受力和运动状态
Fig.6 Force and motion state of corn seed A when its tip faces forward
2时刻,定向定距转盘的型孔转到玉米种子A的下方,种子A以尖端朝上的状态开始慢慢进入型孔,3时刻玉米种子A完全进入型孔,尖端朝上。玉米种子A尖端朝后时,其受力和运动状态如图7所示。
0时刻,玉米种子A与侧立喂入轨道底面的接触点为3,种子主体的周边轮廓与定向定距转盘圆周表面接触,顺时针方向转矩大小为
重力作用线在点0¢左侧,且力臂3较长,对玉米种子绕点0¢顺时针转动阻碍作用较大。由于玉米种子周边轮廓与定向定距转盘圆周表面之间的摩擦力1较小,使1也较小。此时转矩小于0,玉米种子将保持该动作不变。
1时刻,种子A以尖端朝后的姿态开始慢慢进入型孔,2时刻玉米种子A完全进入型孔,尖端朝上。
注: O0¢为t0时刻玉米种子A与侧立喂入轨道底面的接触点。
由以上分析可知,当定向定距机构的工作状态理想时,准备进入型孔的玉米种子无论是尖端朝前还是尖端朝后,都会以尖端朝上的状态进入到型孔中。
侧立喂入轨道的倾角和振幅对玉米种子在侧立喂入轨道中的受力情况影响较大,倾角主要影响玉米种子在定向过程中重力作用线与接触点的位置关系;振幅则会影响激振力和摩擦力的大小[19-22],表现为:振幅增大会使激振力增大,而激振力增大会使定向定距转盘对玉米种子A的推力和摩擦力也增大,即1增大。结合式(1)、式(2)、式(3)进一步分析各工作参数对玉米种子定向过程的影响:倾角和振幅越大,无论尖端朝前还是尖端朝后,玉米种子A的顺时针方向转矩都会增大,即种子越容易发生顺时针转动,甚至会被卷起掉出侧立喂入轨道。由于玉米种子进入和滑出型孔都需要一定的时间,转盘转速过快可能会造成玉米种子没有足够的时间进入或滑出型孔,甚至造成卡种现象。
所以当工作参数设置不恰当时,准备进入型孔的尖端朝前的玉米种子可能无法产生顺时针转动,而尖端朝后的玉米种子却可能产生顺时针转,最后以尖端朝下的状态进入型孔,甚至一些玉米种子可能会被卷起从而无法顺利进入型孔,造成定向失败。对于以尖端朝下的状态进入型孔的玉米种子,当被带到侧立输出轨道入口处时,会有2种运动情况:①随着定向定距转盘继续转动,最后掉落在机构外;②以尖端朝后的状态进入到侧立输出轨道中。针对第2种情况,利用侧立输出轨道中间的台阶能对玉米种子进行第2次定向作用[6-7],可以使部分定向失败的玉米种子(尖端朝后)在经过这个台阶时,通过翻转变成尖端朝前的状态,而定向成功的玉米种子(尖端朝前)可以维持原有状态直接通过。
1.2.2 定距原理
定向定距转盘圆周上的型孔是均匀分布的,且转盘是匀速转动的(假设角速度为),因此相邻2颗玉米种子先后进入侧立输出轨道的时间间隔()是固定的;调节直线振动器的振幅可以使玉米种子在轨道中以某一特定的传输速度前进[23-25]。即,当后1颗玉米种子进入侧立喂入轨道时,前1颗玉米种子已经以速度前进了一段时间(),使相邻玉米种子之间形成固定的间距(定距间距),实现对玉米种子的定距功能。假设定向定距转盘圆周上的型孔数量为,则


其中设定=8,由式(5)可知,通过改变定向定距转盘的转速或侧立输出轨道的振幅都可以对玉米种子的定距间距进行调节。
2 定向定距机构仿真试验
定向定距机构是玉米种子侧立定向定距输出装置能够实现其功能的关键,玉米种子的定向定距成功率和定距间距是判断定向定距机构工作性能的标准。侧立玉米种子能顺利地以尖端朝上的状态进入型孔,并以尖端朝前的状态滑出型孔,即代表玉米种子定向定距成功。上文对该机构定向定距原理的分析属于定性分析,无法得到最佳工作参数,因此采用ADAMS仿真软件[26-27]对定向定距机构进行仿真试验,得到最佳工作参数,优化定向定距机构,为实际装置的制作提供参考依据。
2.1 仿真模型的建立
定向定距机构工作时,只有定向定距功能模块与玉米种子直接接触,因此本研究在建立仿真模型时可以对定向定距机构进行简化,只建立定向定距功能模块的模型,然后为运动的部件添加合适的驱动来模拟实际运动。
参考文献[7]和[25]的建模方法,首先运用Solidworks软件建立等比例的定向定距功能模块装配体模型,然后导入ADAMS仿真软件,利用ADAMS的约束功能为各部件添加相关运动副,比如为固定的部件添加固定副,为旋转部件添加旋转副等。由于玉米种子尖端和主体的周边轮廓材质不同对玉米种子的定向影响较大,所以将玉米种子尖端与主体进行分块建模,赋予不同的材质。玉米种子与定向定距功能模块相关部件之间、不同玉米种子之间均添加接触力[7](每颗玉米种子需添加14个接触力),玉米种子的尖端和主体与定向定距转盘之间的摩擦系数分别设定为0.5和0.35。玉米种子越多,接触力越多,模型越复杂,仿真越容易出错。为了降低出错概率,每个仿真模型中的玉米种子数量为6颗或8颗,尖端朝前和尖端朝后的数量各半,排序随机。分别为侧立喂入轨道和侧立输出轨道在振动方向上添加正弦驱动,模拟直线振动器的振动作用,频率都为50 Hz,参数化振幅分别为1和2;为定向定距转盘在圆周方向上添加旋转驱动,模拟步进电机的旋转作用,参数化角速度为;参数化侧立喂入轨道的倾角为。参考文献[7]对建好的仿真模型进行合理性验证,结果显示玉米种子在仿真模型中的运动效果符合实际,即该仿真模型可以代替实际装置进行试验。
2.2 仿真试验
影响定向定距机构功能的工作参数有:侧立喂入轨道的倾角和振幅1、定向定距转盘的角速度以及侧立输出轨道的振幅2,其中倾角、振幅1和角速度对定向定距成功率有影响,角速度和振幅2对定距间距有影响。根据预试验发现,倾角大于10°后,玉米种子在侧立喂入轨道中拥挤严重,所以设定倾角的试验范围为0~10°;振幅1大于0.1 mm时,玉米种子才能在侧立喂入轨道中前行,但大于0.6 mm后,玉米种子跳跃剧烈,所以设定振幅1的试验范围为0.2~0.6 mm;该机构的工作效率在1.5 s/颗左右即可,玉米种子进入型孔的速率为1、1.5和2 s/颗时对应的角速度分别为45、30和22.5 °/s;2的试验范围与1一致为0.2~0.6 mm。
2.2.1 定向定距成功率优化仿真试验
选侧立喂入轨道的倾角、振幅1和定向定距转盘的角速度为因素,以玉米种子的定向定距成功率为指标,进行仿真正交试验,因素水平见表1。由于振幅2对玉米种子进入和滑出型孔过程影响较小,因此先设定2为0.2 mm,保证玉米种子在侧立输出轨道中能平稳前进即可。采用L934正交表,每组试验利用10个模型(玉米种子数量为6颗和8颗的模型各5个)同时试验,即每组试验共70颗玉米种子。统计得出每组试验的定向定距成功率,试验设计及结果见表2,方差分析结果见表3。、、为因素水平值。

表1 正交试验的因素水平表
注: 倾角与振幅为侧立喂入轨道的倾角与振幅;角速度为定向定距转盘的角速度。
Note: Inclination angle and amplitude are the inclination angle and amplitude of lateral output orbit; Angular velocity is the angular velocity of directional and fixed-distance turntable.
在各因素水平组合下,仿真过程中大部分玉米种子都能定向定距成功,但也有少数玉米种子会定向定距失败,例如种子被转盘卷起无法进入型孔(图8)或以尖端朝下的状态进入到型孔中。

表2 正交试验设计和结果
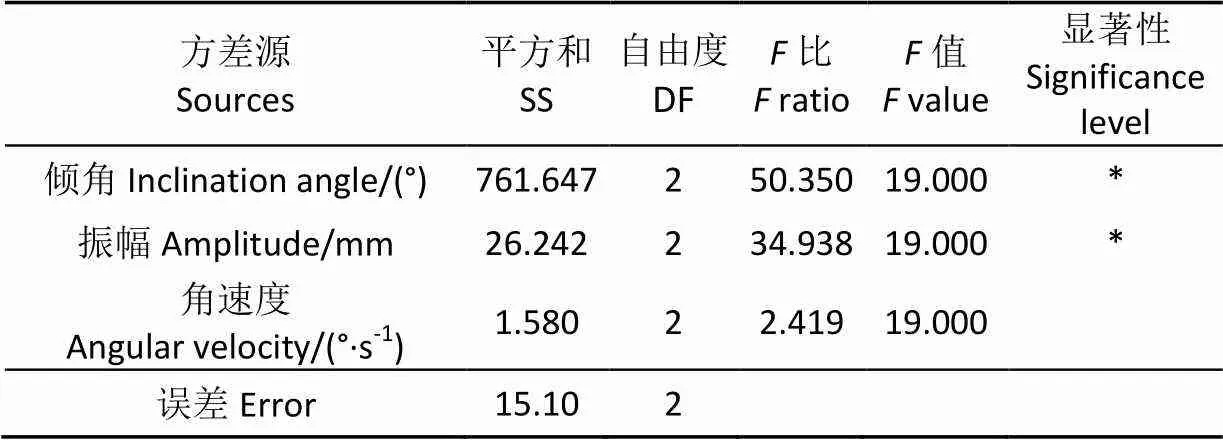
表3 成功率方差分析结果
注: 显著性水平=0.05。
Note: Significance level=0.05.
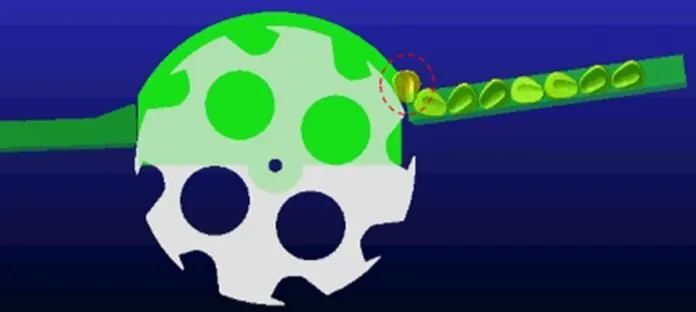
图8 玉米种子定向定距失败
定向定距成功率越高表明定向定距机构工作性能越好。由表2的极差分析可知,影响成功率指标的3个主次因素顺序为:倾角、振幅1、角速度,其较优因素水平组合为122,即倾角为2°、振幅1为0.3 mm、角速度为30 °/s,该状态下定向定距成功率达到91.7%。
通过方差分析可以更准确地判断各因素水平对定向定距成功率的显著性,由表3可知,对于成功率指标,侧立喂入轨道的倾角和振幅12个因素是显著的,而定向定距转盘的角速度并不显著,造成角速度不显著的原因可能是:在所选的3个水平下,定距转盘与每颗玉米种子的接触摩擦时间都能满足要求。由于角速度不是显著性因素,参考极差分析结果,可直接选定向定距转盘的最佳角速度为30 °/s,对应的工作效率为1.5 s/颗,可以满足实际需求。对于显著性因素振幅1,由于其可试验范围较小,参考极差分析结果,也直接选侧立喂入轨道的最佳振幅为0.3 mm。对于倾角,其可试验范围较大,可能会错过最佳倾角。
为确定最佳倾角,在振幅1为0.3 mm、角速度为30°/s的基础上,进一步以成功率为指标,对倾角进行单因素试验。取倾角的试验范围为0°~8°,平均取9个水平。单因素试验结果表明:倾角为3°时,玉米种子定向定距成功率达到最高(94.4%),即选侧立喂入轨道的最佳倾角为3°。
2.2.2 定距间距测试仿真试验
结合定距原理可知,改变定向定距转盘的角速度和侧立输出轨道的振幅2可以调节定距间距,其中角速度已选定最佳值为30°/s。在侧立喂入轨道的倾角和振幅1分别为3°和0.3 mm、定向定距转盘的角速度为30°/s的基础上,以玉米种子的定距间距为指标,对侧立输出轨道的振幅2进行单因素试验,2的试验范围0.2~0.6 mm,平均取5个水平。结果表明:玉米种子的定距间距的范围为39~47 mm,变化不大,即只改变侧立输出轨道的振幅2时,对玉米种子的定距间距的调节作用较小。本文选取侧立输出轨道的最佳振幅与侧立喂入轨道一致为0.3 mm,此时,平均定距间距为43 mm。
最终确定该机构最佳工作参数:侧立喂入轨道的倾角和振幅分别为3°和0.3 mm、定向定距转盘的角速度为30°/s、侧立输出轨道的振幅为0.3 mm,该状态下玉米种子定向定距成功率为94.4%,平均定距间距为43 mm。
另外结合仿真过程和结果发现,除了工作参数外,侧立喂入轨道中的玉米种子数量对玉米种子的定向定距成功率也有影响。相同参数下,玉米种子数量为6颗的模型的定向成功率要高于8颗的模型,后者在仿真时前2颗玉米种子的定向失败概率最高,且第1颗玉米种子经常会被卷起进而无法进入型孔,原因是,玉米种子数量越多,定向定距转盘圆周表面对正在进行定向作用的玉米种子的推力和摩擦力越大,导致其容易被卷起。
所以定向定距机构在工作时,不仅要调节各工作参数为最佳组合,还要保证侧立喂入轨道中的玉米种子数量不能太多,本研究设定不能超过8颗。
3 玉米种子侧立定向定距输出装置的性能试验
为了检验仿真优化结果的准确性和可靠性,搭建玉米种子侧立定向定距输出装置(图9)进行性能试验。调节侧立排序机构的工作电压来改变振幅,使玉米种子能够平稳且较快地输出[12],依据仿真试验得到的最佳工作参数调节定向定距机构的工作参数:侧立喂入轨道的倾角和振幅分别为3°和0.3 mm,定向定距转盘的角速度为30°/s,侧立输出轨道的振幅为0.3 mm。振幅的调节方法是:利用电涡流位移传感器(灵敏度2 V/mm)和PC配合实时监测轨道的振幅,从0 V开始逐渐加大直线电磁振动器的工作电压,当振幅达到0.3 mm时停止[10]。由于定向定距转盘的角速度很低,为使步进电机工作时保持平稳,且没有振动,本文利用步进电机驱动器(型号ZD-2HD43OS)设定步进电机(型号14HS2408)的细分数为32[28-30]。

1. 侧立排序机构 2.定向定距机构 3.机架 4.圆周电磁振动器控制器 5.直线电磁振动器控制器 6.步进电机驱动器 7.成堆玉米种子
取分级处理后的300颗玉米种子进行试验,试验时保持侧立喂入轨道中的玉米种子数量在8颗以下,装置的工作状况见图10。

1.呈 侧立姿态排序的一列玉米种子2.侧立姿态的玉米种子以尖端统一朝前的状态输出,且相邻种子之间间距一致
成堆玉米种子在侧立排序机构的料斗中经过分散、排序输送、分选和姿态变换过程后,以侧立姿态排序进入定向定距机构,期间尺寸偏小、厚度偏大或形状不规则的异形玉米种子都被顺利剔除,玉米种子在分选轨道和侧立姿态变化轨道中不会发生拥挤(图10a)。进入侧立喂入轨道后,呈侧立姿态的玉米种子只有尖端朝前和尖端朝后2种状态。在定向定距机构的作用下,绝大部分玉米种子都能以尖端朝上的状态依次进入到型孔中,然后被旋转的定向定距转盘带到侧立输出轨道入口处,以尖端朝前的姿态依次滑出型孔,进入侧立输出轨道,最后输出的玉米种子尖端统一朝前,且间距一致(图10b)。
整个试验过程中,装置工作稳定,玉米种子输送平稳。300颗种子中有272颗定向定距成功,成功率为90.7%,实际试验的成功率低于仿真试验,这是因为工作环境不如仿真试验理想:实际的玉米种子形状尺寸差异较大、装置装配精度不足等,但此误差在可接受的范围内。对于定向失败但以尖端朝后的状态进入到侧立输出轨道中的13颗玉米种子,经过侧立输出轨道中间台阶的第2次定向作用后,其中9颗尖端朝后的玉米种子能够通过翻转也变成尖端朝前的状态。另外定距间距基本一致,平均为45 mm,比仿真中的平均定距间距大2 mm,差别不大。
4 结论与讨论
本文在电磁振动的基础上设计了一种玉米种子侧立定向定距输出装置,并对其定向定距原理进行了分析。该装置包括侧立排序机构和定向定距机构2部分,其中定向定距机构是该装置的关键。侧立排序机构由圆周电磁振动器和料斗组成,能够对成堆玉米种子进行分散、排序输送、分选和姿态变换使之变为一列呈侧立姿态排序的玉米种子;定向定距机构的核心部分是定向定距功能模块,能够对侧立姿态的玉米种子进行定向和定距作用,使其尖端统一朝前,且相邻种子之间间距一致,然后排序输出。以侧立喂入轨道的倾角和振幅、定向定距转盘的角速度以及侧立输出轨道的振幅为因素,以玉米种子的定向定距成功率和定距间距为指标,对定向定距机构进行仿真试验,得到最佳工作参数:侧立喂入轨道的倾角和振幅分别为3°和0.3 mm、定向定距转盘的角速度为30°/s、侧立输出轨道的振幅为0.3 mm。搭建玉米种子侧立定向定距输出装置,取300颗种子进行性能试验,结果表明在最佳工作参数下该装置工作稳定,玉米种子定向定距成功率为90.7%,定距间距平均为45 mm。该研究为后续玉米种子的动态连续胚面识别、定向包装以及机械化玉米定向播种提供了参考。
玉米机械化定向精量播种技术是未来发展主要方向之一,本文的玉米种子侧立定向定距输出装置是以半马齿长扁平型的玉米种子为对象进行设计的,所以在仿真和性能试验中未考虑对不同形状玉米种子的适应性。但在实际中玉米种子的形状是多样的(比如马齿状、圆扁形等),所以需要继续研究,进一步完善该装置并进行试验,以增强其对不同形状玉米种子的适应性。
[1] Bowers S A, Hayden C W. Influence of seed orientation on bean seedling emergence[J]. Agronomy Journal, 1972, 64(6): 736-738.
[2] Yarnia M, Tabrizi E F M. Effect of seed priming with different concentration of GA3, IAA and kinetin on azarshahr onion germination and seedling growth[J]. J Basic Appl Sci Res, 2012, 2(3): 2657-2661.
[3] Cole R J, Holl K D, Keene C L, et al. Direct seeding of late-successional trees to restore tropical montane forest[J]. Forest Ecology and Management, 2011, 261(10): 1590-1597.
[4] 侯彦龙,徐丽明,陈莉明. 玉米机械化定向播种技术的现状和发展趋势[J]. 农机化研究,2012,34(2):10-14.
Hou Yanlong, Xu Liming, Chen Liming. The current situation and development trend of corn mechanization oriented seeding technology[J]. Journal of Agricultural Mechanization Research, 2012, 34(2): 10-14. (in Chinese with English abstract)
[5] 徐丽明,王应彪,赵学观,等. 一种玉米种子定向方法及定向装置:CN102893723A[P].2013-01-30.
[6] 王应彪,赵学观,徐丽明,等. 基于电磁振动的玉米种子定向排序输送技术[J]. 农业机械学报,2015,46(1):79-88.
Wang Yingbiao, Zhao Xueguan, Xu Liming, et al. Experiment and directional movement technology of corn seed based on electromagnetic vibration[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(1): 79-88. (in Chinese with English abstract)
[7] 邢洁洁,徐丽明,史丽娜,等. 玉米种子电磁振动定向装置仿真模型的建立与验证[J]. 中国农业大学学报,2017,22(4):129-134.
Xing Jiejie, Xu. Liming, Shi Lina, et al. Establishment and verification for the simulation model of directional device based on electromagnetic vibration for corn seeds[J]. Journal of China Agricultural University, 2017, 22(4): 129-134. (in Chinese with English abstract)
[8] 刘闻铎,郭玉富,陈秀生,等. 一种玉米定向播种方法、定向种块制造设备与播种块装置:CN101663935A[P].2010-03-10.
[9] 赵学观,徐丽明,王应彪,等. 基于Fluent与高速摄影的玉米种子定向吸附研究[J]. 农业机械学报,2014,45(10):103-109,28.
Zhao Xueguan, Xu Liming, Wang Yingbiao, et al. Estimation of vehicle states based on adaptive model particle filter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(10): 103-109, 28. (in Chinese with English abstract)
[10] 邢洁洁,徐丽明,史丽娜,等. 圆周电磁振动下单粒玉米种子运动特性分析[J]. 农业工程学报,2016,32(23):21-28.
Xing Jiejie, Xu Liming, Shi Lina, et al. Analysis of movement characteristics of single corn seed under circular electromagnetic vibration[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2016, 32(23): 21-28.(in Chinese with English abstract)
[11] 王应彪,赵学观,徐丽明,等. 振动技术在农业生产中的应用进展[J]. 中国农业大学学报,2013,18(6):231-236.
Wang Yingbiao, Zhao Xueguan, Xu Liming, et al. Progress of vibration technology application in agricultural production[J]. Journal of China Agricultural University, 2013, 18(6): 231-236. (in Chinese with English abstract)
[12] 邢洁洁,徐丽明,刘旭东,等. 电磁振动料斗内玉米种子分散与排序输送仿真及试验[J]. 农业工程学报,2017,33(13):32-39.
Xing Jiejie, Xu Liming, Liu Xudong, et al. Simulation and test of corn seeds’ dispersion and arraying transport in electromagnetic vibration hopper[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(13): 32-39. (in Chinese with English abstract)
[13] 许光驰,吕伟新,钮艳华. 盘形振动上料器的一种系统模型和模拟[J]. 东北林业大学学报,2007,35(6):96-98,101.
Xu Guangchi, Lü Weixin, Niu Yanhua. A systematic model and simulation of vibratory bowl feeder[J]. Journal of Northeast Forestry University, 2007, 35(6): 96-98, 101. (in Chinese with English abstract)
[14] 李力,傅蔡安. 自动送料零件的自然姿态编码的研究[J]. 组合机床与自动化加工技术,2005(11):73-74,76.
Li Li, Fu Caian. The research of coding the natural resting aspects of parts for automatic feeding[J]. Modular Machine Tool & Amp; Automatic Manufacturing Technique, 2005(11): 73-74, 76. (in Chinese with English abstract)
[15] 李昌文,张丽华,纵伟,等. 玉米芯的综合利用研究技术进展[J]. 食品研究与开发,2015(15):139-143.
Li Changwen, Zhang Lihua, Zong Wei, et al. Research progress in comprehensive utilization of corn cobs[J]. Food Research and Development, 2015(15): 139-143. (in Chinese with English abstract)
[16] 葛菁萍,刘国明,孙红兵,等. 响应面法优化玉米芯半纤维素水解条件[J]. 中国农学通报,2011,27(18):64-68.
Ge Jingping, Liu Guoming, Sun Hongbing, et al. Response surface methodology to optimize the hydrolysis condition of corncob hemicellulose[J]. Chinese Agricultural Science Bulletin, 2011, 27(18): 64-68. (in Chinese with English abstract)
[17] 李心平,马福丽,高连兴. 玉米种子的跌落式冲击试验[J]. 农业工程学报,2009,25(1):113-116.
Li Xinping, Ma Fuli, Gao Lianxing. Dropping impact experiment on corn seeds[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(1): 113-116. (in Chinese with English abstract)
[18] 袁月明,栾玉振. 玉米籽粒力学性质的试验研究[J]. 吉林农业大学学报,1996,18(4):78-81.
Yuan Yueming, Luan Yüzhen. Experimental investigation of mechanical properties for corn kernels[J]. Journal of Jilin Agricultural University, 1996, 18(4): 78-81. (in Chinese with English abstract with)
[19] 宋世国,王其超. 直线式电磁振动上料器的设计[J]. 机械设计,1987,5(7):30-35.
Song Shiguo, Wang Qichao. The design of linear magnetic vibrator feeder. Machine Design[J]. 1987, 5(7): 30-35.(in Chinese with English abstract)
[20] 王翔. 电磁振动料斗动态特性及其结构优化[D]. 秦皇岛:燕山大学,2011.
Wang Xiang. Dynamic Characteristics and Optimum Structure of Electromagnetic Vibratory Feeder[D]. Qinhuangdao: Yanshan University, 2011. (in Chinese with English abstract)
[21] 董艳. 2BD-6水稻直播机电磁振动排种器虚拟设计[D]. 南宁:广西大学,2005.
Dong Yan. Optimization Design on Electromagnetic Vibrated Seeding Apparatus of 2BD-6 Rice Direct-seeding Machine by Virtual Prototype Technology[D]. Nanning: Guangxi University, 2005. (in Chinese with English abstract)
[22] 俞亚新,张斌,赵匀,等. 振动式排种器上稻种有序排列运动分析[J]. 浙江大学学报:工学版,2009,43(5):902-906.
Yu Yaxin, Zhang Bin, Zhao Yun, et al. Movement analysis of rice seed embryo ordering in vibration seed-metering device[J]. Journal of Zhejiang University: Engineering Science, 2009, 43(5): 902-906. (in Chinese with English abstract)
[23] 鹿芳媛,马旭,齐龙,等. 基于离散元法的杂交稻振动匀种装置参数优化与试验[J]. 农业工程学报,2016,32(10):17-25.
Lu Fangyuan, Ma Xu, Qi Long, et al. Parameter optimization and experiment of vibration seed-uniforming device for hybrid rice based on discrete element method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(10): 17-25. (in Chinese with English abstract)
[24] 权龙哲,奚德君,王建宇,等. 玉米粒群批量整列系统参数优化与试验[J]. 农业机械学报,2017,48(7):59-68.
Quan Longzhe, Xi Dejun, Wang Jianyu, et al. Parameters optimization and experiment of batch transportation for maize grain[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(7): 59-68. (in Chinese with English abstract)
[25] 邢洁洁,徐丽明,袁全春,等. 直线电磁振动下玉米种子定向传输的模拟仿真试验与验证[J]. 中国国农业大学学报,2017,22(10):120-125.
Xing Jiejie, Xu Liming, Yuan Quanchun, et al. Simulation test and verification of corn seeds’ directional transmission under linear electromagnetic vibration[J]. Journal of China Agricultural University, 2017, 22(9): 120-125. (in Chinese with English abstract)
[26] 李超,邢洁洁,徐丽明,等. 柔性梳脱式酿酒葡萄脱粒机构设计与试验[J]. 农业工程学报,2015,31(6):290-296. Li Chao, Xing Jiejie, Xu Liming, et al. Design and experiment of wine grape threshing mechanism with flexible combing striping monomer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(6): 290-296.(in Chinese with English abstract)
[27] 王春耀,梁勤安,闵磊,等. 水果输送过程中定向机理的分析与试验[J]. 农业工程学报,2012,28(20):95-98.
Wang Chunyao, Liang Qinan, Min Lei, et al. Analysis and test for orientation mechanism in fruit transportation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(20): 95-98. (in Chinese with English abstract)
[28] 雷凯. 步进电机细分驱动技术的研究[D]. 苏州:苏州大学,2003.
Lei Kai. Study on Subdivision Driving Technique of Stepper Motor[D]. Suzhou: Suzhou University, 2003. (in Chinese with English abstract)
[29] 刘宝志. 步进电机的精确控制方法研究[D]. 济南:山东大学,2010.
Liu Baozhi. The Study of Exactly Control Stepping Motor[D]. Jinan: Shandong University, 2010. (in Chinese with English abstract)
[30] 高伟康. 基于STM32的两相四线步进电机高精度驱动器设计[D]. 合肥:安徽理工大学,2017.
Gao Weikang. Design of High Precision Driver for Two Phase-for Wire Stepper Motor based on STM32[D]. Hefei: Anhui University of Science & Technology, 2017. (in Chinese with English abstract)
Design and test of dent corn seed directional and fixed-distance output device with lateral standing posture
Xing Jiejie, Xu Liming※, Yuan Quanchun, Duan Zhuangzhuang, Ma Shuai, Yu Changchang
(,,100083,)
Corn seeds’ directional and fixed-distance output and embryo surface’s identification are the keys of mechanically directional sowing of corn. Besides, corn seeds’ directional and fixed-distance output is also the base of embryo surface’s identification. However, at present, there are few studies on corn seeds’ directional and fixed-distance output, and there is even no practicable implementation. In order to deal with the problem, a dent corn seeds’ directional and fixed-distance output device with lateral standing posture was designed based on electromagnetic vibration in this paper, and implementation principles of orientation and fixing distance for corn seeds by this device were discussed. The device was composed of 2 parts: corn seeds’ arraying mechanism with lateral standing posture and corn seeds’ directional and fixed-distance mechanism. The second part was the crux of this device. The corn seeds’ arraying mechanism with lateral standing posture was made up of circular electromagnetic vibrator and hopper. After dispersion, orderly transportation, separation and posture transformation by corn seeds’ arraying mechanism with lateral standing posture, the stacked corn seeds became arrayed with lateral standing posture. After orientation and fixing distance by corn seeds’ directional and fixed-distance mechanism, the corn seeds arrayed with lateral standing posture were output with tip-forward state, and the spacing between adjacent seeds was consistent. The core part of corn seeds’ directional and fixed-distance mechanism was directional and fixed-distance function module, and it was a combination of lateral feeding orbit, directional and fixed-distance turntable, left and right side panels and lateral output orbit. Corn seeds’ directional and fixed-distance mechanism had 4 essential working parameters, namely inclination angle of lateral feeding orbit, amplitude of lateral feeding orbit, angular velocity of directional and fixed-distance turntable, and amplitude of lateral output orbit. The result of implementation principles showed that the 4 working parameters had great influence on the process of orienting and fixing distance for corn seeds. Inappropriate working parameters could cause unsuccessful orientation and fixing distance for corn seed. In order to optimize the working effect of corn seeds’ directional and fixed-distance mechanism, the simulation model of the directional and fixed-distance function module was established by software ADAMS (automatic dynamic analysis of mechanical systems), and then orthogonal tests and single-factor tests were carried out. The inclination angle of lateral feeding orbit, amplitude of lateral feeding orbit, angular velocity of directional and fixed-distance turntable and amplitude of lateral output orbit were taken as factors, the success rate of orientation and fixing distance for corn seed and the spacing between adjacent seeds as test indices. Based on the analysis of experimental results, the optimal working parameters were determined:Inclination angle of lateral feeding orbit is 3°, lateral feeding orbit is 0.3 mm,angular velocity of directional and fixed-distance turntable is 30 °/s, and amplitude of lateral output orbit is 0.3 mm. Under the condition, the success rate of orientation and fixing distance for corn seed reached 94.4%, and the average spacing between adjacent seeds was about 43 mm. In order to verify the accuracy and reliability of simulation optimization result, the practical dent corn seeds’ directional and fixed-distance output device with lateral standing posture was produced. According to the optimal working parameters obtained from the simulation test, the working parameters of the practical device were adjusted. The performance test was performed on the basis of 300 corn seeds and the results coincided with simulation very well, which were as follows: 1) The device worked stably under the condition; 2) The realistic success rate of orientation and fixing distance for corn seed was 90.7%; 3) The realistic average spacing between adjacent seeds was about 45 mm. Generally, this research provides the condition for embryo surface’s identification, directional packaging and mechanically directional sowing of corn.
mechanization; design; crops; corn seeds; lateral standing posture; orientation; fixing distance
2017-09-22
2018-01-16
国家自然基金项目(51475461)
邢洁洁,博士生,主要从事生物生产自动化研究。Email:584731137@qq.com
徐丽明,教授,博士生导师,主要从事生物生产自动化技术与装备研究。Email:xlmoffice@126.com
10.11975/j.issn.1002-6819.2018.04.007
S233.73
A
1002-6819(2018)-04-0055-09
邢洁洁,徐丽明,袁全春,段壮壮,马 帅,于畅畅. 马齿型玉米种子侧立定向定距输出装置的设计与试验[J]. 农业工程学报,2018,34(4):55-63.doi:10.11975/j.issn.1002-6819.2018.04.007 http://www.tcsae.org
Xing Jiejie, Xu Liming, Yuan Quanchun, Duan Zhuangzhuang, Ma Shuai, Yu Changchang. Design and test of dentcorn seed directional and fixed-distance output device with lateral standing posture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(4): 55-63. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.04.007 http://www.tcsae.org
