基于图像相关检测的快速反射镜稳像系统及方法
2018-03-08焦慧华
焦慧华,周 伟
(1.琼台师范高等专科学校,海南 海口 571127;2.中国科学院上海技术物理研究所,上海 200000)
一、引言
本文涉及光电成像系统的稳像技术[1],相机在成像过程中,由于外界或自身的各种干扰,导致在曝光时间内,图像在焦平面上存在相对运动,成像质量往往产生一定程度的退化,为了得到高分辨的图像,必须采取稳像措施。稳像技术的应用使得成像系统的整体性能得到提升,成像的分辨率也大大提高。实时的稳像技术在军事卫星相机的战场侦察、目标监视和预警监测等领域具有重要作用。
机载、舰载和空间成像系统对目标成像时,会由于平台的运动、颤振及姿态变化等使相机在曝光时被照物影像与感光元件间存在相对运动,以此带来成像模糊及拖尾效应[2],使得成像质量往往产生一定程度的退化,对比度以及分辨率降低,对于高分辨率相机来说,情况更是如此。这种退化单靠提高成像器件的分辨率或者单纯的后期图像处理已经不能满足得到高分辨像质的要求。因此,如何降低甚至消除外界干扰对成像质量的影响也成为了稳像技术的关键所在。
目前常用的稳像技术主要有:光学式稳像技术、微机械式稳像技术、电子稳像技术和综合稳像技术[3]。光学稳像技术是在光路中设置一些光学元件作为对不稳定图像的补偿。典型的光学稳像方法是利用光楔来控制瞄准线的方向,通过移动或者转动光楔,改变出射光线的角度和方向,来进行像移的补偿,从而达到稳像的目的。光学稳像技术的主要缺陷是仅适用于振动较小的环境条件,且补偿器的结构和制造工艺太复杂。同时,如果仅依靠棱镜、反射镜或者光楔等光学元件进行被动补偿,稳定能力受到较大限制。电子稳像技术是应用数字图像处理的方法来直接确定图像序列的偏移并进行补偿的技术,电子稳像方法只是去除视频图像序列帧间因摄像机无意抖动造成的扰动,它只能使视频序列在播放过程中在视觉上产生一种稳定播放的效果,而不能对单幅图像在曝光时间内进行稳像,也就是不能真正提高其成像的分辨率。微机械稳像技术[4]是通过微机械装置直接控制偏转镜的转动或成像焦面移动,补偿像移,完成稳像任务。微机械稳像系统简单、结构紧凑,但需要通过一定方法来获得焦面位置并对位移进行控制。综合稳像技术就是应用多种稳像技术共同实现稳像,以获得更好像质的技术。
本文所述的稳像系统属于微机械稳像系统,微机械稳像方式是对传统光机稳像方式的全面改进,具有高速、高精度的像移探测能力和补偿执行能力,并且利用该技术组成的系统还具有体积小、功耗低、对遥感器光学系统影响小和对像质影响小等众多优点,因此微机械补偿方式成为高分辨率遥感器首选的稳像技术之一。
二、稳像系统结构
本系统的结构框图如图1所示。
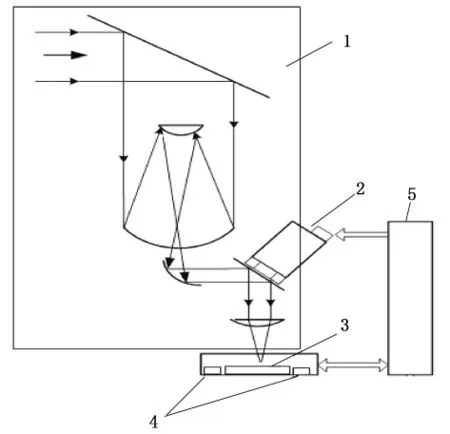
图1 基于图像相关检测的快速反射镜稳像系统结构示意图
整个系统主要由成像光学系统1、快速反射镜2、大面阵焦平面探测器3、两个微型高速CMOS探测器4和FPGA图像相关处理单元5组成。该系统的关键在于微型高速CMOS探测器如何实时获得成像系统光轴的偏移量,由于成像系统的光轴因外界扰动或自身运动导致抖动时,则在焦平面上的图像会发生微小的偏移,这时候可以在焦平面上安装高速CMOS探测器,与主成像探测器并行排列,为了提高图像偏移量检测的准确度,这里采用两个微型CMOS探测器并排安装在大面阵焦平面探测器两侧,与大面阵焦平面探测器距离不超过2mm,如图2所示。

图2 成像系统焦平面探测器安装示意图
微型CMOS探测器对图像进行高速的采样,然后通过实时图像相关的方法获得图像在焦平面的偏移量。光学信号通过成像光学系统经过快速反射镜的反射后将信号汇聚在大面阵焦平面探测器与两个辅助微型高速CMOS探测器上面,两个辅助微型高速CMOS探测器对运动的图像进行高速采样,通过FPGA图像相关处理单元实时获得图像的偏移量,偏移量反馈给快速反射镜的控制器,控制快速反射镜的偏转,使图像在焦平面上稳定。快速反射镜采用压电陶瓷快摆镜,压电陶瓷具有响应频率快、分辨率高,位移精确的特点。最后大面阵焦平面探测器对稳定的图像进行积分,这样就大面阵焦平面探测器可以获得高分辨率的图像。
图像相关算法计算量比较大,但是计算结果的精度很高,误差小于0.3像素。对于图像相关计算量较大的问题,该系统设计了基于FPGA的快速图像相关模块,FPGA具有并行处理,灵活编程的特点。该系统中的FPGA图像相关处理模块采用快速傅里叶变换的方法实现两帧图像的实时相关运算,其内部功能模块如图3所示,其进行相关处理的流程如下。
(1)由高速微型CMOS探测器输出的图像送入到FPGA的图像输入接口,首先经过FPGA的图像预处理单元,对图像进行相关算法的预处理操作,即暗流校正、增益校正等。

图3 FPGA图像相关处理单元功能框图
(2)输入图像进行预处理后,分别对参考帧图像和当前帧图像并行进行FFT傅里叶变换,这里采用基-2快速傅里叶变换算法,提高运算速度。
(3)参考帧图像和当前帧图像进行FFT变换后,再对参考帧图像的FFT取共轭,与当前帧图像的FFT直接相乘运算,将乘得的结果再进行IFFT傅里叶逆变换,这样就完成了两帧图像的相关运算。
(4)最后通过曲面拟合,取相关运算结果中最大值的位置,位置坐标就是两帧图像之间的位置偏移量,通过FPGA输出接口送给快速反射镜驱动控制输入端。完成偏移量的反馈控制。
该系统通过高速FPGA图像相关的方法实现图像的运动偏移量检测,然后采用微机械装置快速反射镜的转动控制图像在焦平面上稳定,使得系统具有响应速度快、体积小、结构紧凑等优点。
三、系统相关实现技术
为了实现稳像系统,我们采用了如下的实现技术:
1.一种基于图像相关检测的快速反射镜稳像系统,主要指通过成像系统焦平面两侧的两个辅助微型高速CMOS探测器实时采样,采样的相邻两帧图像经过基于FPGA的图像相关器计算图像运动矢量,将运动矢量反馈给快速反射镜控制器,控制反射镜偏转光束,实现成像探测器稳定成像。
2.采用两个辅助微型高速CMOS探测器对焦平面的偏移图像进行采样,该探测器的像元大小在64x64以内,帧速要高于120帧每秒,两个微型探测器分别安装在主成像探测器两边,与成像探测器距离不超过2mm,并与主成像探测器共焦面。
3.采用FPGA实现两帧64x64像元图像的相关处理,采用快速傅里叶变换算法,快速计算两帧图像的偏移量。
4.采用基于压电陶瓷的快速反射镜控制光束的偏转,快速反射镜控制器的输入与图像相关器的偏移量输出级联,采用PID控制算法实现快速反射镜的闭环控制。
四、实现方案
根据本文所述的基于图像相关检测的快速反射镜稳像系统,它实现的结构示意图如图1所示,平台由成像光学系统1、快速反射镜2、大面阵焦平面探测器3、两个微型高速CMOS探测器4和FPGA图像相关处理单元5构成。
成像光学系统1采用普通的光学望远镜,口径为 150mm,焦距 1800mm,F 数为 12,分辨率〈5”,系统瞬时视场为 8urad,总视场 0.95°。
快速反射镜2采用四支点XY轴压电偏转平台,其闭环倾斜角度可达+2mrad,分辨率达0.05urad,镜面直径为 50mm,闭环线性度 0.2%,共振频率 3.3KHz,其镜面与焦平面的距离 H为100mm。
大面阵焦平面探测器3采用具有全局快门的单色面阵CCD器件,其面阵大小为1k*1k,响应波长为400~1000nm,像元尺寸为 14um*14um,帧频5fps,积分时间可调整。
微型高速CMOS探测器4采用高帧频小面阵CMOS器件,其面阵大小为64*64,可见光波段,像移尺寸为8um*8um,帧频150 fps,积分时间小于1ms。
FPGA图像相关处理单元5如图3所示,它由图像预处理模块、图像FFT变换模块、矩阵IFFT逆变换模块和曲面拟合模块构成。FPGA逻辑单元数为12060LEs,内置2个PLL和234Kbits RAM,外部时钟为40MHz。
五、结语
本文所述的稳像系统属于微机械稳像系统,微机械稳像方式是对传统光机稳像方式的全面改进,具有高速、高精度的像移探测能力和补偿执行能力,并且利用该技术组成的系统还具有体积小、功耗低、对遥感器光学系统影响小和对像质影响小等众多优点,因此微机械补偿方式成为高分辨率遥感器首选的稳像技术之一。
[1]刘永昌.成像稳定系统的技术要求 [J].弹箭技术,2012,(1):21-29.
[2]徐之海,陈岳庭,等.面阵空间相机稳像补偿研究[J].红外与激光工程,2007,(10):593-596.
[3]陈启立,宋 利,等.视频稳像技术综述[J].数字视频,2007,(3):15-17.
[4]Yue ting,Chen Zhihai,Xu QiLi.Image Stabilization Using Motion Estimation and Micro-mechanical Compensation.2008 congress on Image and Signal Processing 2008:578-582.
